四旋翼常用仿真工具
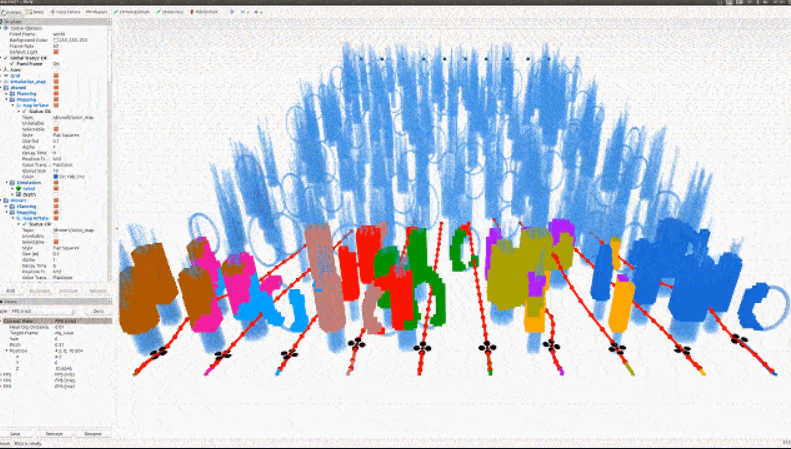
rviz:
简单的质点(也可以加上动力学姿态),用urdf模型在rviz中显示无人机和飞行轨迹、地图等。配合ROS代码使用,轻量化适合多机。典型的比如浙大ego-planner的仿真:
https://github.com/ZJU-FAST-Lab/ego-planner-swarm.git
RotorS:
https://github.com/ethz-asl/rotors_simulator
利用gazebo仿真,提供gazebo中的简单四旋翼模型。wiki地址:
https://github.com/ethz-asl/rotors_simulator/wiki

PX4软件在环仿真:
px4飞控自带软件在环仿真SITL:
https://docs.px4.io/main/en/simulation/
支持gazebo、flightgear、jMAVSim、AirSim等仿真软件。但是主要支持的是gazebo:
https://docs.px4.io/main/en/sim_gazebo_gz/
阿木实验室的prometheus项目也是采用px4软件在环gazebo仿真:
https://gitee.com/amovlab/Prometheus.git
由于每架飞机真的在运行PX4飞控固件仿真,因此比较占用cpu,一般一台电脑顶多仿真10架(这也是PX4 SITL支持的上限)。
FlightMare:
由UZH的RPG组开发的flightmare,采用虚幻引擎搭建,物理仿真逼真度高,适合需要与环境交互的仿真:
https://github.com/uzh-rpg/flightmare.git

其他:
Airsim
采用虚幻引擎,相较gazebo环境更逼真。可能需要运行在gazebo上,和无人机的接口也是个问题,可以参考PX4和Ardupilot中关于airsim仿真的描述。也可以看airsim手册里关于无人机仿真的描述。支持多架仿真。
https://frendowu.github.io/AirSim-docs-zh/
Rflysim
采用虚幻引擎,戴博士搭建的?付费版支持集群功能。
https://rflysim.com/docs/#/