CMOS摄像头驱动分析
文章目录
- CMOS摄像头驱动分析
- ov2640_probe_dt从设备树中获取ov2640的GPIO引脚并进行初始化
- v4l2_i2c_subdev_init初始化v4l2子设备
- v4l2_ctrl_new_std添加vflip控制器
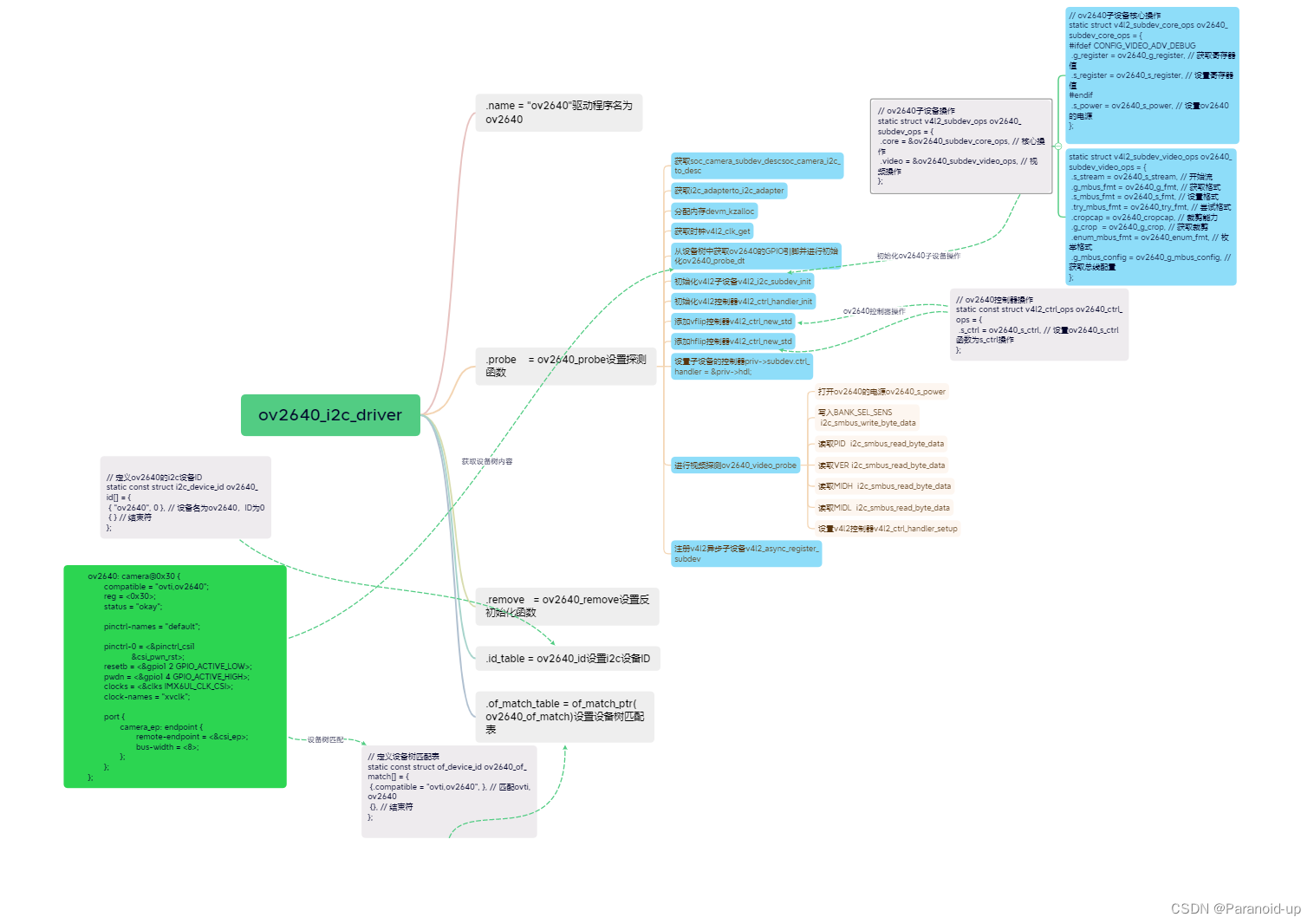
ov2640_probe_dt从设备树中获取ov2640的GPIO引脚并进行初始化
ov2640_probe_dt从设备树中获取ov2640的GPIO引脚并进行初始化
这个函数用于从设备树中获取OV2640摄像头的GPIO引脚并进行初始化。下面是对该函数的概括总结:
请求并获取重置引脚(resetb_gpio)。如果重置引脚未分配,则打印调试信息。如果获取重置引脚失败,则返回错误码。
请求并获取电源引脚(pwdn_gpio)。如果电源引脚未分配,则打印调试信息。如果获取电源引脚失败,则返回错误码。
初始化soc_camera_subdev_desc结构体。
设置电源控制函数为ov2640_hw_power。
设置复位函数为ov2640_hw_reset。
将soc_camera_subdev_desc结构体的指针赋值给i2c_client的platform_data字段。
该函数的主要作用是通过设备树获取OV2640摄像头的GPIO引脚,并将相关信息存储在ov2640_priv结构体中,以便后续的初始化操作使用。
// 从设备树中获取ov2640的GPIO引脚并进行初始化
static int ov2640_probe_dt(struct i2c_client *client,
struct ov2640_priv *priv)
{
/* 请求重置GPIO引脚 */
priv->resetb_gpio = devm_gpiod_get_optional(&client->dev, "resetb",
GPIOD_OUT_LOW);
if (!priv->resetb_gpio)
dev_dbg(&client->dev, "resetb gpio Not allocated!\n");
else if (IS_ERR(priv->resetb_gpio))
return PTR_ERR(priv->resetb_gpio);
/* 请求电源GPIO引脚 */
priv->pwdn_gpio = devm_gpiod_get_optional(&client->dev, "pwdn",
GPIOD_OUT_HIGH);
if (!priv->pwdn_gpio)
dev_dbg(&client->dev, "pwdn gpio Not allocated!\n");
else if (IS_ERR(priv->pwdn_gpio))
return PTR_ERR(priv->pwdn_gpio);
/* 初始化soc_camera_subdev_desc */
priv->ssdd_dt.power = ov2640_hw_power; // 设置电源控制函数
priv->ssdd_dt.reset = ov2640_hw_reset; // 设置复位函数
client->dev.platform_data = &priv->ssdd_dt; // 设置platform_data
return 0;
}
v4l2_i2c_subdev_init初始化v4l2子设备
这个函数用于初始化v4l2_subdev结构体,并与i2c_client进行关联。下面是对该函数的概括总结:
使用提供的v4l2_subdev_ops初始化v4l2_subdev结构体。
设置标志位,表示该子设备是I2C设备。
将v4l2_subdev的owner字段设置为i2c_client的driver owner。
将v4l2_subdev的dev字段设置为指向i2c_client的dev。
使用v4l2_set_subdevdata函数将v4l2_subdev的私有数据设置为i2c_client。
使用i2c_set_clientdata函数将i2c_client的私有数据设置为v4l2_subdev。
初始化name字段,格式为"driver_name adapter_id-addr",其中driver_name是i2c_client的driver name,adapter_id是i2c_adapter的ID,addr是i2c_client的地址。
该函数的主要作用是将v4l2_subdev结构体与i2c_client进行关联,并初始化相应的字段,以便后续的操作可以方便地访问和管理I2C子设备。
void v4l2_i2c_subdev_init(struct v4l2_subdev *sd, struct i2c_client *client,
const struct v4l2_subdev_ops *ops) // 初始化 v4l2_subdev 结构体
{
v4l2_subdev_init(sd, ops); // 初始化 v4l2_subdev 结构体
sd->flags |= V4L2_SUBDEV_FL_IS_I2C; // 设置标志位,表示是 I2C 设备
/* the owner is the same as the i2c_client's driver owner */
sd->owner = client->dev.driver->owner; // 设置 owner,与 i2c_client 的 driver owner 相同
sd->dev = &client->dev; // 设置 dev,指向 i2c_client 的 dev
/* i2c_client and v4l2_subdev point to one another */
v4l2_set_subdevdata(sd, client); // 设置 v4l2_subdev 的私有数据为 i2c_client
i2c_set_clientdata(client, sd); // 设置 i2c_client 的私有数据为 v4l2_subdev
/* initialize name */
snprintf(sd->name, sizeof(sd->name), "%s %d-%04x",
client->dev.driver->name, i2c_adapter_id(client->adapter),
client->addr); // 初始化 name,格式为 "driver_name adapter_id-addr"
}
ov2640_subdev_ops定义了OV2640摄像头子设备的操作函数。下面是对该代码的概括总结:
ov2640_subdev_core_ops结构体定义了OV2640子设备的核心操作函数,包括获取/设置寄存器值和设置电源状态等。这些函数在配置和控制OV2640摄像头时起作用。
ov2640_subdev_video_ops结构体定义了OV2640子设备的视频操作函数,包括开始流、获取/设置视频格式、获取/设置裁剪参数、枚举视频格式和获取总线配置等。这些函数用于处理与视频数据相关的操作。
ov2640_subdev_ops结构体定义了OV2640子设备的全部操作函数,包括核心操作和视频操作。这些函数将被用于初始化和管理OV2640摄像头子设备。
这些操作函数提供了对OV2640摄像头子设备的核心功能和视频功能的支持,使得应用程序可以方便地配置、控制和获取摄像头的数据。
// ov2640子设备核心操作
static struct v4l2_subdev_core_ops ov2640_subdev_core_ops = {
#ifdef CONFIG_VIDEO_ADV_DEBUG
.g_register = ov2640_g_register, // 获取寄存器值
.s_register = ov2640_s_register, // 设置寄存器值
#endif
.s_power = ov2640_s_power, // 设置ov2640的电源
};
static struct v4l2_subdev_video_ops ov2640_subdev_video_ops = {
.s_stream = ov2640_s_stream, // 开始流
.g_mbus_fmt = ov2640_g_fmt, // 获取格式
.s_mbus_fmt = ov2640_s_fmt, // 设置格式
.try_mbus_fmt = ov2640_try_fmt, // 尝试格式
.cropcap = ov2640_cropcap, // 裁剪能力
.g_crop = ov2640_g_crop, // 获取裁剪
.enum_mbus_fmt = ov2640_enum_fmt, // 枚举格式
.g_mbus_config = ov2640_g_mbus_config, // 获取总线配置
};
// ov2640子设备操作
static struct v4l2_subdev_ops ov2640_subdev_ops = {
.core = &ov2640_subdev_core_ops, // 核心操作
.video = &ov2640_subdev_video_ops, // 视频操作
};
v4l2_ctrl_new_std添加vflip控制器
这个函数用于创建一个新的V4L2控件(control)。下面是对该函数的概括总结:
接受一个V4L2控制器处理器(v4l2_ctrl_handler)指针(hdl),控件操作(ops),控件的ID(id),最小值(min),最大值(max),步长(step)和默认值(def)作为参数。
函数内部定义了控件名称(name)、控件类型(type)和控件标志(flags)的变量。
调用v4l2_ctrl_fill函数来填充控件信息,包括名称、类型、最小值、最大值、步长、默认值和标志。
如果控件类型是菜单(V4L2_CTRL_TYPE_MENU)、整数菜单(V4L2_CTRL_TYPE_INTEGER_MENU)或者复合类型(V4L2_CTRL_COMPOUND_TYPES),则设置处理器的错误信息为EINVAL,并返回空指针。
调用v4l2_ctrl_new函数来创建一个新的控件,使用填充的控件信息和提供的参数。
返回新创建的控件的指针。
该函数的主要作用是通过提供的参数创建一个新的V4L2控件,并将其添加到V4L2控制器处理器中。控件用于管理和控制设备的各种参数和功能。
struct v4l2_ctrl *v4l2_ctrl_new_std(struct v4l2_ctrl_handler *hdl, // 创建一个新的控件
const struct v4l2_ctrl_ops *ops, // 控件操作
u32 id, s64 min, s64 max, u64 step, s64 def) // 控件的id,最小值,最大值,步长,缺省值
{
const char *name; // 控件名称
enum v4l2_ctrl_type type; // 控件类型
u32 flags; // 控件标志
v4l2_ctrl_fill(id, &name, &type, &min, &max, &step, &def, &flags); // 填充控件信息
if (type == V4L2_CTRL_TYPE_MENU || // 如果控件类型是菜单
type == V4L2_CTRL_TYPE_INTEGER_MENU || // 或者是整数菜单
type >= V4L2_CTRL_COMPOUND_TYPES) { // 或者是复合类型
handler_set_err(hdl, -EINVAL); // 设置错误信息
return NULL; // 返回空指针
}
return v4l2_ctrl_new(hdl, ops, NULL, id, name, type, // 创建新的控件
min, max, step, def, NULL, 0,
flags, NULL, NULL, NULL);
}
// ov2640控制器操作
static const struct v4l2_ctrl_ops ov2640_ctrl_ops = {
.s_ctrl = ov2640_s_ctrl, // 设置ov2640_s_ctrl函数为s_ctrl操作
};