计算机图形学 | 实验十一:阴影计算
- 计算机图形学 | 实验十一:阴影计算
- 帧缓冲
- 创建一个帧缓冲
- 纹理附件
- 渲染缓冲对象附件
- 总结
- 阴影映射
- 算法思想
- 深度贴图
- 渲染阴影
- 抗锯齿
- assimp库
- 结果
华中科技大学《计算机图形学》课程
MOOC地址:计算机图形学(HUST)
计算机图形学 | 实验十一:阴影计算
帧缓冲
创建一个帧缓冲
和OpenGL其他对象一样,我们使用glGenFramebuffers的函数来创建一个帧缓冲对象:
unsigned int fbo;
glGenFramebuffers(1, &fbo);
在这里插入代码片
它的使用函数也和其它的对象类似。首先我们创建一个帧缓冲对象,将它绑定为激活的(Active)帧缓冲,做一些操作,之后解绑帧缓冲。我们使用glBindFramebuffer来绑定帧缓冲。
glBindFramebuffer(GL_FRAMEBUFFER, fbo);
在完成上面的操作后,我们还是不能直接使用帧缓冲,因为一个完整的帧缓冲至少需要满足以下条件:
- 附加至少一个缓冲(颜色、深度或模板缓冲)。
- 至少有一个附件(Attachment)。
- 所有的附件都必须是完整的(保留了内存)。
由于我们的帧缓冲不是默认帧缓冲,渲染指令将不会对窗口的视觉输出有任何影响。出于这个原因,渲染到一个不同的帧缓冲被叫做离屏渲染(Off-screen Rendering)。要保证所有的渲染操作在主窗口中有视觉效果,我们需要再次激活默认帧缓冲,将它绑定到0:
glBindFramebuffer(GL_FRAMEBUFFER, fbo);
当然,在完成所有的帧缓冲操作之后,不要忘记删除这个帧缓冲对象:
glDeleteFramebuffers(1, &fbo);
纹理附件
当把一个纹理附加到帧缓冲的时候,所有的渲染指令将会写入到这个纹理中,就想它是一个普通的颜色/深度或模板缓冲一样。使用纹理的优点是,所有渲染操作的结果将会被储存在一个纹理图像中,我们之后可以在着色器中很方便地使用它。
为帧缓冲创建一个纹理和创建一个普通的纹理步骤类似:
unsigned int texture;
glGenTextures(1, &texture);
glBindTexture(GL_TEXTURE_2D, texture);
glTexImage2D(GL_TEXTURE_2D, 0, GL_RGB, 800, 600, 0, GL_RGB, GL_UNSIGNED_BYTE, NULL);
glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_MIN_FILTER, GL_LINEAR);
glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_MAG_FILTER, GL_LINEAR);
创建好纹理后,接下来我们把它附加到帧缓冲上:
glFramebufferTexture2D(GL_FRAMEBUFFER, GL_COLOR_ATTACHMENT0, GL_TEXTURE_2D, texture, 0);
glFrameBufferTexture2D有以下的参数:
- target:帧缓冲的目标(绘制、读取或者两者皆有)
- attachment:我们想要附加的附件类型。当前我们正在附加一个颜色附件。注意最后的0意味着我们可以附加多个颜色附件。如ATTACHMENT1,2…
- textarget:你希望附加的纹理类型
- texture:要附加的纹理本身
- level:多级渐远纹理的级别。我们将它保留为0。
除了颜色附件之外,我们还可以附加一个深度和模板缓冲纹理到帧缓冲对象中。要附加深度缓冲的话,我们将附件类型设置为GL_DEPTH_ATTACHMENT。注意纹理的格式(Format)和内部格式(Internalformat)类型将变为GL_DEPTH_COMPONENT,来反映深度缓冲的储存格式。要附加模板缓冲的话,你要将第二个参数设置为GL_STENCIL_ATTACHMENT,并将纹理的格式设定为GL_STENCIL_INDEX。
渲染缓冲对象附件
渲染缓冲对象(Renderbuffer Object)是在纹理之后引入到OpenGL中,作为一个可用的帧缓冲附件类型的,所以在过去纹理是唯一可用的附件。和纹理图像一样,渲染缓冲对象是一个真正的缓冲,即一系列的字节、整数、像素等。渲染缓冲对象附加的好处是,它会将数据储存为OpenGL原生的渲染格式,它是为离屏渲染到帧缓冲优化过的。
创建一个渲染缓冲对象和帧缓冲类似:
unsigned int rbo;
glGenRenderbuffers(1, &rbo);
绑定操作:
glBindRenderbuffer(GL_RENDERBUFFER, rbo);
由于渲染缓冲对象通常都是只写的,它们会经常用于深度和模板附件,因为大部分时间我们都不需要从深度和模板缓冲中读取值,只关心深度和模板测试。我们需要深度和模板值用于测试,但不需要对它们进行采样,所以渲染缓冲对象非常适合它们。当我们不需要从这些缓冲中采样的时候,通常都会选择渲染缓冲对象,因为它会更优化一点。
创建一个深度和模板渲染缓冲对象可以通过调用glRenderbufferStorage函数来完成:
glRenderbufferStorage(GL_RENDERBUFFER, GL_DEPTH24_STENCIL8, 800, 600);
GL_DEPTH24_STENCIL8作为内部格式,它封装了24位的深度和8位的模板缓冲。
最后附加这个渲染缓冲对象:
glFramebufferRenderbuffer(GL_FRAMEBUFFER,GL_DEPTH_STENCIL_ATTACHMENT, GL_RENDERBUFFER, rbo);
总结
在了解帧缓冲原理后,我们将会将场景渲染到一个附加到帧缓冲对象上的颜色纹理中,之后将在一个横跨整个屏幕的四边形上绘制这个纹理。我们将在第二部分的阴影实验中用到,接下来简单介绍下这个步骤:
- 创建并绑定一个帧缓冲;
- 创建一个纹理图像并把它作为附件绑定到帧缓冲上;
- 将纹理附件(或渲染对象附件)附加到帧缓冲上;
- 检查帧缓冲是否完整(检测是否出现异常);
- 在帧缓冲上进行绘制;
- 解绑 && 删除工作;
阴影映射
算法思想
阴影映射(Shadow Mapping)背后的思路非常简单:具体过程是我们从光源视角出发(以光源所在位置作为摄像机位置),绘制一条射线到达场景上各个片元,得到射线第一次击中的那个物体,然后用这个最近点和射线上其他点进行对比。然后我们将测试一下看看射线上的其他点是否比最近点更远,如果是的话,这个点就在阴影中。我们使用深度缓冲来实现阴影。
深度缓冲里的一个值是摄像机视角下,对应于一个片元的一个0到1之间的深度值。我们从光源的透视图来渲染场景,并把深度值的结果储存到纹理中。通过这种方式,我们就能对光源的透视图所见的最近的深度值进行采样。最终,深度值就会显示从光源的透视图下见到的第一个片元了。我们管储存在纹理中的所有这些深度值,叫做深度贴图(depth map)或阴影贴图。
深度贴图
第一步我们需要生成一张深度贴图(Depth Map)。深度贴图是从光的透视图里渲染的深度纹理,用它计算阴影。因为我们需要将场景的渲染结果储存到一个纹理中,因此需要用到帧缓冲。按照第一节的帧缓冲使用步骤来使用:
首先,我们要为渲染的深度贴图创建一个帧缓冲对象:
GLuint depthMapFBO;
glGenFramebuffers(1, &depthMapFBO);
创建一个2D纹理,提供给帧缓冲的深度缓冲使用:
const GLuint SHADOW_WIDTH = 1024, SHADOW_HEIGHT = 1024;
GLuint depthMap;
glGenTextures(1, &depthMap);
glBindTexture(GL_TEXTURE_2D, depthMap);
glTexImage2D(GL_TEXTURE_2D, 0, GL_DEPTH_COMPONENT,SHADOW_WIDTH, SHADOW_HEIGHT, 0, GL_DEPTH_COMPONENT, GL_FLOAT, NULL);
glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_MIN_FILTER,GL_NEAREST);
glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_MAG_FILTER,GL_NEAREST);
glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_WRAP_S, GL_REPEAT);
glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_WRAP_T, GL_REPEAT);
我们只关心深度值,我们要把纹理格式指定为GL_DEPTH_COMPONENT,1024是我们预先设置的深度贴图的解析度。
绑定帧缓冲,并将纹理附件附加到帧缓冲上:
glBindFramebuffer(GL_FRAMEBUFFER, depthMapFBO);
glFramebufferTexture2D(GL_FRAMEBUFFER, GL_DEPTH_ATTACHMENT, GL_TEXTURE_2D, depthMap, 0);
glDrawBuffer(GL_NONE);
glReadBuffer(GL_NONE);
glBindFramebuffer(GL_FRAMEBUFFER, 0);
我们需要的只是在从光的透视图下渲染场景的时候深度信息,所以颜色缓冲没有用。然而帧缓冲对象不是完全不包含颜色缓冲的,所以我们需要显式告诉OpenGL我们不适用任何颜色数据进行渲染。调用glDrawBuffer和glReadBuffer把读和绘制缓冲设置为GL_NONE来做这件事。
接下来我们渲染深度贴图,主要分为两个步骤:
- 光源空间的变换
- 渲染至深度贴图
- 光源空间的变换,这一部分的变换在着色器内完成
本次实验我们使用的是一个所有光线都平行的定向光。出于这个原因,我们将为光源使用正交投影矩阵:
GLfloat near_plane = 1.0f, far_plane = 7.5f;
glm::mat4 lightProjection = glm::ortho(-10.0f, 10.0f, -10.0f, 10.0f, near_plane, far_plane);
其次创建一个视图矩阵来变换每个物体,把它们变换到从光源视角可见的空间中,我们将使用glm::lookAt函数;这次从光源的位置看向场景中央:
glm::mat4 lightView = glm::lookAt(glm::vec(-2.0f, 4.0f, -1.0f), glm::vec3(0.0f), glm::vec3(1.0));
二者相结合为我们提供了一个光空间的变换矩阵,它将每个世界空间坐标变换到光源处所见到的那个空间:
glm::mat4 lightSpaceMatrix = lightProjection * lightView;
- 进行一次渲染,形成深度贴图
// 渲染阴影深度贴图
glBindFramebuffer(GL_FRAMEBUFFER, depthMapFBO);
glViewport(0, 0, SHADOW_WIDTH, SHADOW_HEIGHT);
glClear(GL_DEPTH_BUFFER_BIT);
shadowMap_shader.Use();
shadowMap_shader.SetMat4("lightPV", lightPV);
DrawScene(shadowMap_shader, current_frame);
glBindFramebuffer(GL_FRAMEBUFFER, 0);
此时顶点着色器内容即为(1)中的空间变换,而片段着色器则什么也不做,如下所示:
void main()
{
// gl_FragDepth = gl_FragCoord.z;
}
因为其内置变量gl_FragDepth会自动更新深度信息。
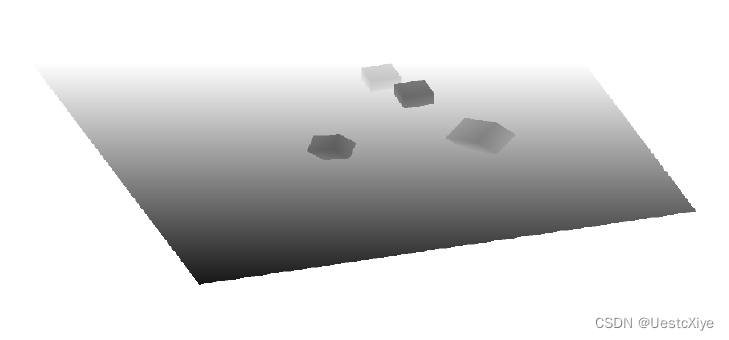
在光的透视图视角下,很完美地用每个可见片元的最近深度填充了深度缓冲。通过将这个纹理投射到一个2D四边形上,就能在屏幕上显示出来,显示结果如下:
渲染阴影
生成深度贴图以后我们就可以开始生成阴影了。这段代码在像素着色器中执行,用来检验一个片元是否在阴影之中,不过我们在顶点着色器中进行光空间的变换:
void main()
{
//...
LightSpaceFragPos = lightPV * vec4(FragPos, 1.0f);
gl_Position = projection * view * vec4(FragPos, 1.0f);
//...
}
LightSpaceFragPos这个输出向量。我们用同一个lightSpaceMatrix,把世界空间顶点位置转换为光空间,将这个输出给片段着色器,进行深度的比较。
像素着色器使用Blinn-Phong光照模型渲染场景。我们接着计算出一个shadow值,当fragment在阴影中时是1.0,在阴影外是0.0。
计算阴影:
float ShadowCalculation(vec4 fragPosLightSpace)
{
vec3 projCoords = fragPosLightSpace.xyz /fragPosLightSpace.w;
projCoords = projCoords * 0.5 + 0.5;
// 光的位置视野下最近的深度
float closestDepth = texture(depthMap, projCoords.xy).r;
// 片元的当前深度
float currentDepth = projCoords.z;
// 阴影偏移,防止阴影失真
float bias = 0.005;
float shadow = currentDepth - bias > closestDepth ? 1.0 : 0.0;
return shadow;
}
上面即为片段着色器的相关代码,在计算阴影中我们要注意几个问题:
- 顶点着色器输出一个裁切空间顶点位置到gl_Position时,OpenGL自动进行一个透视除法,将裁切空间坐标的范围-w到w转为-1到1,这要将x、y、z元素除以向量的w元素来实现。由于裁切空间的FragPosLightSpace并不会通过gl_Position传到像素着色器里,我们必须自己做透视除法。
vec3 projCoords = fragPosLightSpace.xyz / fragPosLightSpace.w;
来自深度贴图的深度在0到1的范围,我们也打算使用projCoords从深度贴图中去采样,所以我们将NDC坐标变换为0到1的范围:
projCoords = projCoords * 0.5 + 0.5;
在渲染阴影时,很容易出现阴影失真的问题,表现为交替黑线,形成原因如下:
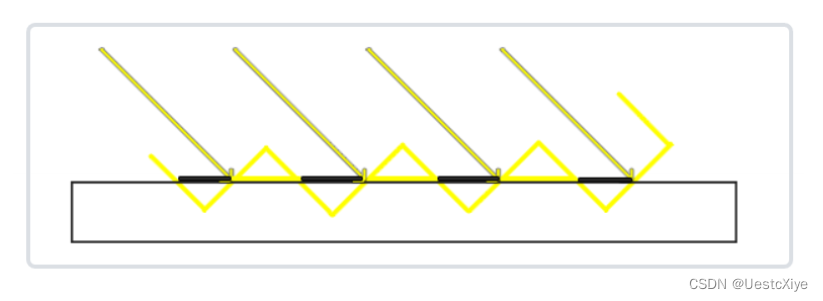
阴影贴图受限于解析度,在距离光源比较远的情况下,多个片元可能从深度贴图的同一个值中去采样。图片每个斜坡代表深度贴图一个单独的纹理像素。你可以看到,多个片元从同一个深度值进行采样。
当光源以一个角度朝向表面的时候就会出问题,这种情况下深度贴图也是从一个角度下进行渲染的。多个片元就会从同一个斜坡的深度纹理像素中采样,有些在地板上面,有些在地板下面;这样我们所得到的阴影就有了差异。因为这个,有些片元被认为是在阴影之中,有些不在,由此产生该现象。
这时,我们用一个叫做阴影偏移(shadow bias)的技巧来解决这个问题,我们简单的对表面的深度(或深度贴图)应用一个偏移量,这样片元就不会被错误地认为在表面之下了:
float bias = 0.005;
float shadow = currentDepth - bias > closestDepth ? 1.0 : 0.0;
抗锯齿
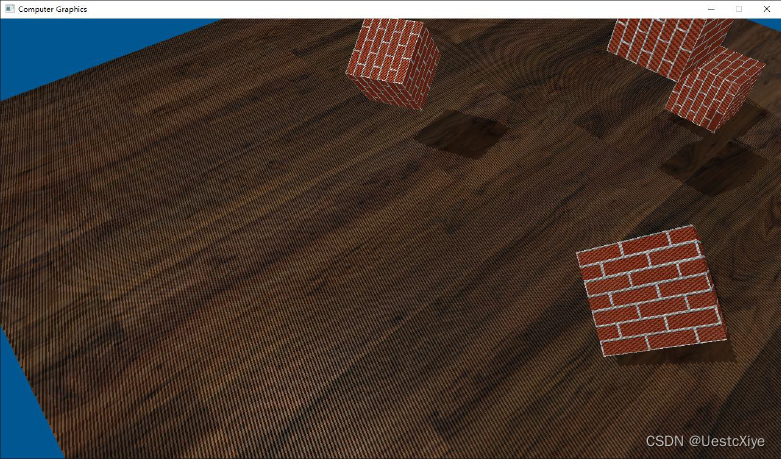
如果你放大看阴影,在阴影映射边缘你可以看到很明显的锯齿:
因为深度贴图有一个固定的解析度,多个片元对应于一个纹理像素。结果就是多个片元会从深度贴图的同一个深度值进行采样,这几个片元便得到的是同一个阴影,这就会产生锯齿边;
可以通过增加解析度来降低锯齿。
另一个(并不完整的)解决方案叫做PCF(percentage-closer filtering),这是一种多个不同过滤方式的组合,它产生柔和阴影,使它们出现更少的锯齿块和硬边。核心思想是从深度贴图中多次采样,每一次采样的纹理坐标都稍有不同。每个独立的样本可能在也可能不再阴影中。所有的次生结果接着结合在一起,进行平均化,我们就得到了柔和阴影。
float shadow = 0.0;
vec2 texelSize = 1.0 / textureSize(shadowMap, 0);
for(int x = -1; x <= 1; ++x)
{
for(int y = -1; y <= 1; ++y)
{
float pcfDepth = texture(shadowMap, projCoords.xy + vec2(x, y) * texelSize).r;
shadow += currentDepth - bias > pcfDepth ? 1.0 : 0.0;
}
}
shadow /= 9.0;
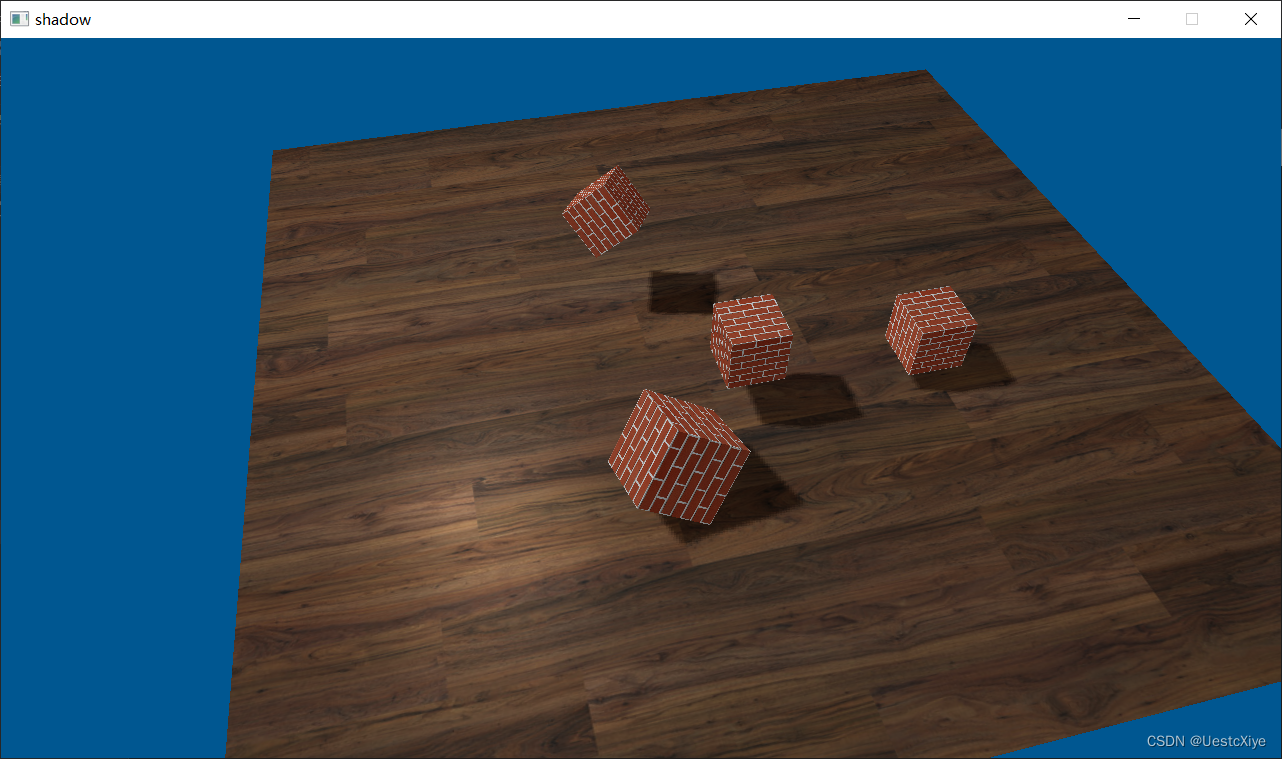
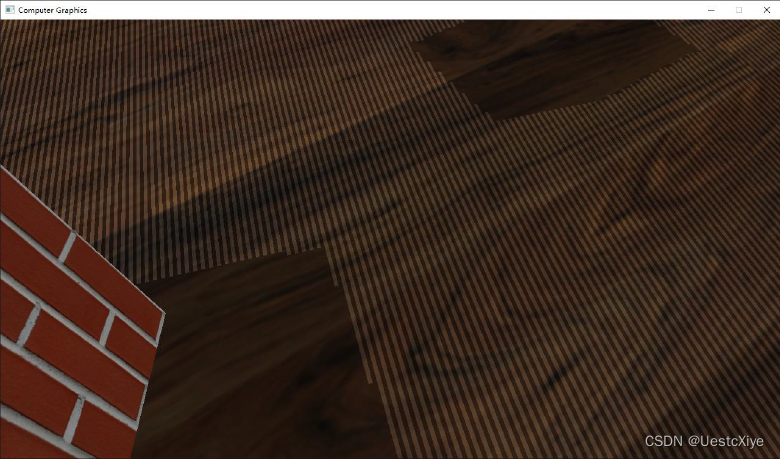
PCF使用后效果如图:
assimp库
引擎开发五: Assimp库及使用
Assimp的安装编译及使用过程全纪录(VS2015)(适合菜鸟看的超详细记录)
error LNK2019: 无法解析的外部符号 _stbi_load,该符号在函数 _main 中被引用
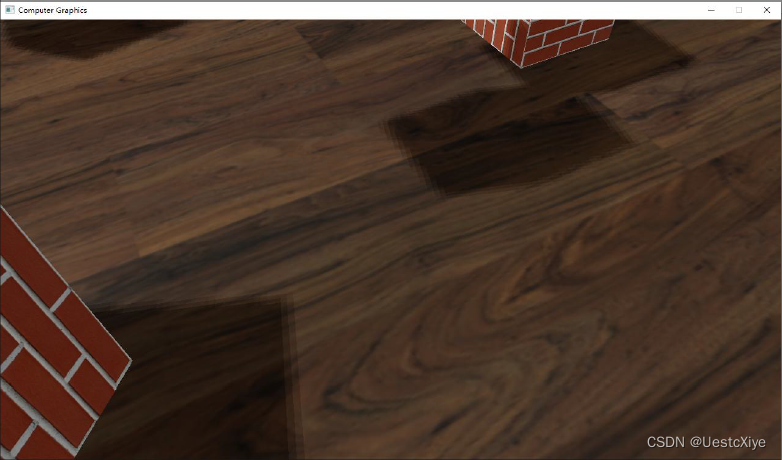
结果