Teleoperation System
远程操作系统
We introduce ALOHA: A Low-cost Open-source Hardware System for Bimanual Teleoperation. With a $20k budget, it is capable of teleoperating precise tasks such as threading a zip tie, dynamic tasks such as juggling a ping pong ball, and contact-rich tasks such as assembling the chain in the NIST board #2.
我们介绍了ALOHA:一种用于双手远程操作的低成本开源硬件系统。凭借2万美元的预算,它能够远程操作精确的任务,如穿拉链,动态任务,如玩乒乓球,以及丰富的接触任务,如在NIST板2中组装链条。
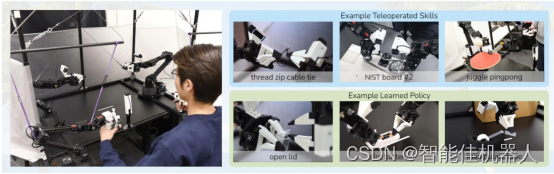
Fig. 1: ALOHA : A Low-cost pen-source Hardware System for Bimanual Teleoperation. The whole system costs $20k with of-the-shelfrobots and 3D printed components Lef: The user teleoperates by backdriving the leader robots. with the follower rohots mirrorine the motionRight: ALOHA is capable of precise. contact-rich, and dynamic tasks. We show examples of both teleoperated and learned skills.
图1:ALOHA:用于双手动远程操作的低成本笔源硬件系统。整个系统的成本约2万美元,包括货架机器人和3D打印组件Lef:用户通过回溯引导机器人进行远程操作。跟随者旋转反光镜的动作右:ALOHA能够精确。接触丰富且动态的任务。我们展示了远程操作和学习技能的例子。
Learned Policy
学习策略
We introduce Action Chunking with Transformers (ACT). The videos below show real-time rollouts of learned policies, imitating from only 50 demonstrations for each task. ACT predicts a sequence of target joint positions given RGB images and proprioception. For the three following tasks, ACT obtains 96%, 84%, 64% success respectively.
我们介绍了变形金刚的动作方块(ACT)。下面的视频显示了学习策略的实时推出,每个任务只模仿了50个演示。ACT预测给定RGB图像和本体感觉的目标关节位置序列。对于以下三项任务,ACT分别获得96%、84%和64%的成功率。

ViperX 6dof Arm (follower)
ViperX 6自由度手臂(从动件)
| #Dofs(公司名称) | 6+gripper(6+夹具) |
|---|---|
| Reach(臂展)) | 750mm |
| Span(范围)) | 1500mm |
| Repeatability(可重复性)) | 1mm |
| Accuracy( 精确)) | 5-8mm |
| Working Payload(工作有效载荷)) | 750g |
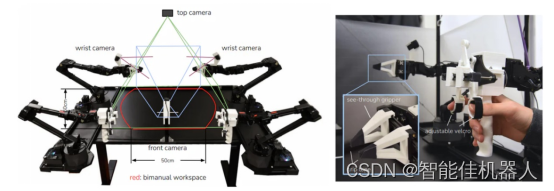
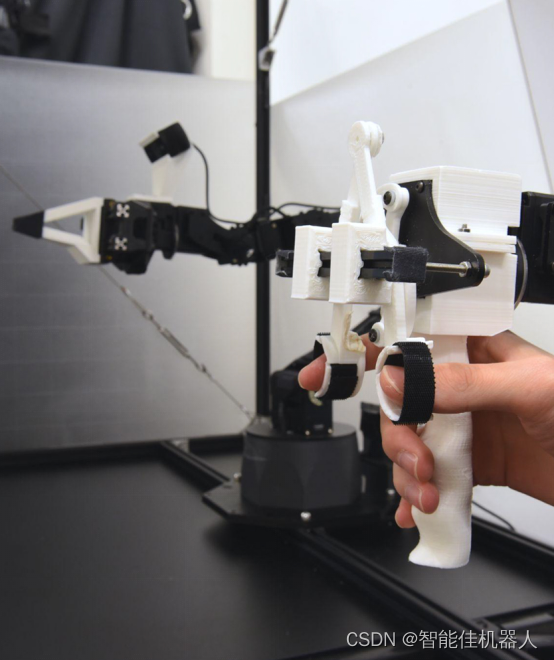
Fig. 3: Lef: Camera viewpoints of the front, top, and two wrist cameras, together with an illustration of the bimanual workspace of ALOHAMiddle: Detailed view of the “handle and scissor" mechanism and custom gripers Right: Technical spec of the ViperX 6dof robot 1j.
图3:Lef:正面、顶部和两个手腕摄像头的摄像头视角,以及ALOHAMiddle的双手操作工作区的示意图:“手柄和剪刀”机构和自定义夹具的详细视图右:ViperX 6dof机器人1j的技术规格。
Observations during policy execution
观察报告
We show example image observations (i.e. the input to the ACT policy) at evaluation time. There is a total of 4 RGB cameras each streaming at 480x640. Two of the cameras are stationery and the other two are mounted on the wrist of robots.
我们展示了评估时的示例图像观察结果(即ACT策略的输入)。总共有4个RGB摄像机,每个摄像机的分辨率为480x640。其中两个摄像头是文具,另外两个安装在机器人的手腕上。
Slide Ziploc
幻灯片Ziploc

Slot Battery
槽式电池

Open Cup
开杯


有兴趣把这个项目带到你们大学吗?