目录
一、资源说明
二、基本参数
1、参数
2、引脚说明
3、驱动说明
MAX1508模块驱动时序
对应程序:
PWM信号
四、部分代码说明
接线说明
1、STC89C52RC+MAX1508模块
2、STM32F103C8T6+MAX1508模块
五、基础知识学习与相关资料下载
六、视频效果展示与程序资料获取
七、项目所有材料清单
八、注意事项
九、接线表格
一、资源说明
| 单片机型号 | 测试条件 | 模块名称 | 代码功能 |
| STC89C52RC | 1.晶振11.0592M | MAX1508模块 | 单片机驱动MAX1508模块按键控制直流电机正反转加减速启停 |
| STM32F103C8T6 |
| MAX1508模块 |
二、基本参数
1、参数

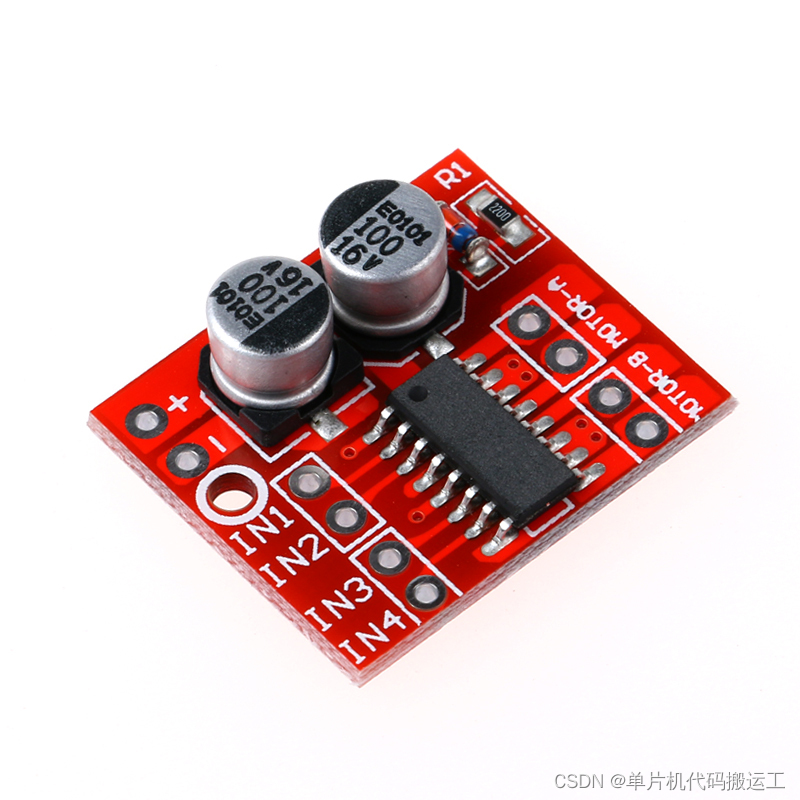
2、引脚说明
| MAX1508模块 | 引脚说明 |
| +(正极) | 给电机供电(此处8V供电 根据需要来) |
| -(GND) | 电源地 此处要与单片机共地 |
| IN1 | 对应OUT1 IN1输入高则OUT1输出高 |
| IN2 | 对应OUT2 IN2输入高则OUT2输出高 |
| IN3 | 对应OUT3 IN3输入高则OUT3输出高 |
| IN4 | 对应OUT4 IN4输入高则OUT4输出高 |
| MOTOR-A | 接电机和OUT2为一组 输出高低由IN1控制 |
| 接电机和OUT1为一组 输出高低由IN2控制 | |
| MOTOR-B | 接电机和OUT4为一组 输出高低由IN3控制 |
| 接电机和OUT3为一组 输出高低由IN4控制 |
3、驱动说明
MAX1508模块驱动时序
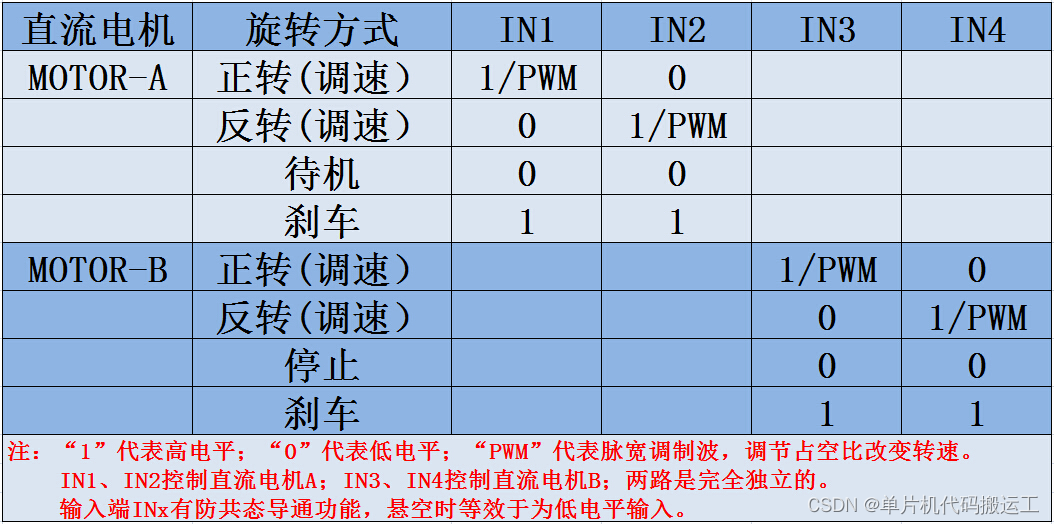
对应程序:
以下以STC89C52RC程序为例
//正转
void turn_Syntropy(void)
{
Pwm_IN1_R=0;
Pwm_IN3_L=0;
}
//反转
void turn_Reverse(void)
{
Pwm_IN2_R=0;
Pwm_IN4_L=0;
}
//停止
void turn_Stop(void)
{
Pwm_IN1_R=1;
Pwm_IN2_R=1;
Pwm_IN3_L=1;
Pwm_IN4_L=1;
TR0=0;
}PWM信号
此处用51定时器1来生成
void tim0() interrupt 1
{
TL0 = 0xA4; //设置定时初值
TH0 = 0xFF; //设置定时初值 0.1ms
times++;
if(times<=Speed)
{
if(!Flag_Syntropy_Reverse)
{
Pwm_IN2_R=1;
Pwm_IN4_L=1;
}
else
{
Pwm_IN1_R=1;
Pwm_IN3_L=1;
}
}
else
{
if(!Flag_Syntropy_Reverse)
{
Pwm_IN2_R=0;
Pwm_IN4_L=0;
}
else
{
Pwm_IN1_R=0;
Pwm_IN3_L=0;
}
}
if(times>=Period)
{
times=0;
}
}
四、部分代码说明
接线说明
需要自定义引脚可在此处更改,STM32要自定义引脚的话也要注意引脚时钟使能的更改
1、STC89C52RC+MAX1508模块
//MAX1508引脚定义
sbit Pwm_IN1_R=P1^0;
sbit Pwm_IN2_R=P1^1;
sbit Pwm_IN3_L=P1^2;
sbit Pwm_IN4_L=P1^3;
//按键引脚定义
sbit K_Start_Stop=P2^0; //启停按键
sbit K_Syntropy_Reverse=P2^1; //两电机同向反向按键
sbit K_UP_Speed=P2^2; //两电机同时加速按键
sbit K_Down_Speed=P2^3; //两电机同时减速按键2、STM32F103C8T6+MAX1508模块
//MAX1508引脚定义
// TIM3 输出比较通道1
#define GENERAL_TIM_CH1_GPIO_CLK RCC_APB2Periph_GPIOA
#define GENERAL_TIM_CH1_PORT GPIOA
#define GENERAL_TIM_CH1_PIN GPIO_Pin_6
// TIM3 输出比较通道2
#define GENERAL_TIM_CH2_GPIO_CLK RCC_APB2Periph_GPIOA
#define GENERAL_TIM_CH2_PORT GPIOA
#define GENERAL_TIM_CH2_PIN GPIO_Pin_7
// TIM3 输出比较通道3
#define GENERAL_TIM_CH3_GPIO_CLK RCC_APB2Periph_GPIOB
#define GENERAL_TIM_CH3_PORT GPIOB
#define GENERAL_TIM_CH3_PIN GPIO_Pin_0
// TIM3 输出比较通道4
#define GENERAL_TIM_CH4_GPIO_CLK RCC_APB2Periph_GPIOB
#define GENERAL_TIM_CH4_PORT GPIOB
#define GENERAL_TIM_CH4_PIN GPIO_Pin_1
//按键引脚定义
#define K_Start_Stop GPIO_Pin_4 //启停按键 GPIOB_Pin_4 0x0010 //?GPIOB_Pin_3
#define K_Syntropy_Reverse GPIO_Pin_5 //两电机同向反向按键 GPIOB_Pin_5 0x0020
#define K_UP_Speed GPIO_Pin_6 //两电机同时加速按键 GPIOB_Pin_6 0x0040
#define K_Down_Speed GPIO_Pin_7 //两电机同时减速按键 GPIOB_Pin_7 0x0080五、基础知识学习与相关资料下载
- STC89C52RC程序下载 直戳跳转
- STM32F103C8T6程序下载
- 串口下载 直戳跳转
- ST-LINK下载 直戳跳转
- J-LINK下载 直戳跳转
- DAP-LINK下载 直戳跳转
六、视频效果展示与程序资料获取
视频连接 直戳跳转
资料获取 直戳跳转
七、项目所有材料清单
| STC89C52RC驱动方案 | 图片 | STM32F103C8T6驱动方案 | 图片 | 备注 K_A08_002 |
| STC89C52RC系统板X1 |
| STM32F103C8T6系统板X1 |
|
|
| MAX1508模块x1 |
| MAX1508模块x1 |
| |
| 直流电机x2 |
| 直流电机x2 |
| |
| Micro USB线X1 |
| Micro USB线X2 |
| |
| 母母杜邦线X6 公母杜邦线X6 公公杜邦线X2 |
| 母母杜邦线X6 公母杜邦线X6 公公杜邦线X2 |
| |
| J-LINK下载器 |
|










八、注意事项
- VCC GND请勿接反,接反易烧
- 异常时,排除接线接触不良
- 单片机与模块需要共地接线
九、接线表格
| 单片机型号 | 模块 | 对应引脚(上:模块引脚 下:单片机引脚) | ||||
| STC89C52RC | MAX1508模块 | IN1 | IN2 | IN3 | IN4 | GND |
| P1.0 | P1.1 | P1.2 | P1.3 | GND(共地) | ||
| 按键模块 | KEY1 | KEY2 | KEY3 | KEY4 | GND | |
| P2.0 | P2.1 | P2.2 | P2.3 | GND | ||
| STM32F103C8T6 | MAX1508模块 | IN1 | IN2 | IN3 | IN4 | GND |
| PA6 | PA7 | PB0 | PB1 | GND(共地) | ||
| 按键模块 | KEY1 | KEY2 | KEY3 | KEY4 | GND | |
| PB4 | PB5 | PB6 | PB7 | GND | ||
![[附源码]计算机毕业设计springboot校园生活服务平台](https://img-blog.csdnimg.cn/5823a6b4bceb42499543b2902645e9f9.png)



![[附源码]计算机毕业设计JAVA校园新闻管理系统](https://img-blog.csdnimg.cn/e295943b29c14169893781f7d315d297.png)



![[Java]图论详解(内附详细代码)](https://img-blog.csdnimg.cn/07aba73044864a539f5305e003a6f28a.png)
![[Linux]------线程控制与互斥](https://img-blog.csdnimg.cn/a845f85eb75349838d8701ba4b13d84f.png)
