Robot Dynamics Lecture Notes学习笔记之浮动基动力学
- Contact Forces
- Soft Contact Model
- Contact Forces from Constraints
- Constraint Consistent Dynamics
- Contact Switches and Impact Collisions
- Impulse Transfer
- Energy Loss
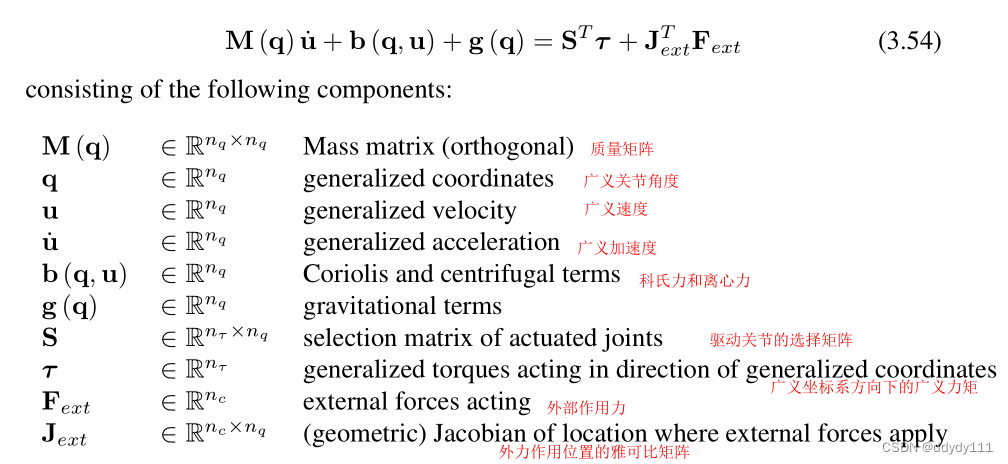
浮动基座系统的广义坐标分别由驱动关节坐标
q
j
{{q}_{j}}
qj和非驱动基座坐标
q
b
{{q}_{b}}
qb组成,相应的速度
u
j
=
q
˙
j
∈
R
n
j
{{u}_{j}}={{\dot{q}}_{j}}\in {{R}^{{{n}_{j}}}}
uj=q˙j∈Rnj和
u
b
∈
R
6
{{u}_{b}}\in {{R}^{6}}
ub∈R6,但是
u
b
{{u}_{b}}
ub不等于不等于位置和方向参数化的时间导数
q
˙
{\dot{q}}
q˙。使用选择矩阵S选择驱动关节,根据下面公式选择

为了控制非驱动基坐标
q
b
{{q}_{b}}
qb,需要知道外部作用力
F
e
x
t
{{F}_{ext}}
Fext,机器人不同,其来源亦不同。例如,这种力可以来自与环境的接触(相互作用力)(例如有腿机器人)
特别是接触力的情况下,使用下面公式替代:

F
c
{{F}_{c}}
Fc表示机器人环境作用力
Contact Forces
有两种根本不同的方法来模拟接触力。软接触法通过力元件(即弹簧-阻尼器)对相互作用进行建模,其中力仅是接触点的位置和速度的函数。硬接触法将接触视为运动约束
Soft Contact Model
 软接触模型下,接触力模拟为弹簧阻尼力
软接触模型下,接触力模拟为弹簧阻尼力
对于软接触模型,我们通常将第一次与环境接触时的点确定为
F
c
0
{{F}_{c0}}
Fc0。当环境采用线性弹簧-阻尼器模型时,机器人对环境施加的接触力为

虽然从第一个角度来看,这样的环境建模似乎是合乎逻辑和物理正确的,但事实证明,找到物理上正确的弹簧和阻尼参数来模拟系统动力学几乎是不可能的。多体系统和接触的组合微分方程存在的一个大问题是变得非常难(慢多体动力学和快接触动力学)。解决这样的问题,要么速度差,要么精度低。为了克服这一问题,通常采用数值模拟的方法来调整刚度和阻尼的接触参数
Contact Forces from Constraints
接触也可以作为运动学约束来处理,而不是由接触处的力单元产生的接触力。如果点
C
C
C与位置
r
c
{{r}_{c}}
rc接触,则不允许再移动:

同样的公式也适用于和扩展接触面积情况下的转动约束

这具有很高的益处,因为它仅基于多体系统动力学描述,提供了直接访问估计地面反作用力的方法,而无需任何进一步的接触力传感器。
Constraint Consistent Dynamics
我们可以定义动态一致的,支持零空间投影的矩阵为:

N
c
{{N}_{c}}
Nc定义了一个广义的运动空间,它对支撑杆没有加速度或力耦合作用。将接触力(3.61)的解代入运动方程(3.56)得到

(3.60)意味着
J
˙
c
u
=
−
J
c
u
˙
{{\dot{J}}_{c}}u=-{{J}_{c}}\dot{u}
J˙cu=−Jcu˙
运动的约束一致方程可以简洁地表示为:

Contact Switches and Impact Collisions
硬接触模型要求将系统动力学分析细分为两个区间,分别对接触情况变化前后的影响进行分析。
撞击本身是一种复杂的物理现象,发生在两个或多个物体相互碰撞时。撞击的特点是持续时间很短,峰值力很高,导致能量的迅速耗散和大的加速度。为了模拟能量传递和耗散过程,采用了各种系数,如恢复系数和脉冲比。将这一过程理想化,分别考虑撞击是一个无限小的短过程,需要包括物体接触时速度的瞬时变化。
Impulse Transfer
为了求解接触脉冲,我们使用时间为
t
0
{{t}_{0}}
t0的单点运动积分方程

分别为冲击力
F
c
{{F}_{c}}
Fc和撞击前后的广义速度u-和u+
假设一个具有牛顿碰撞定律的完美非弹性碰撞,所有被认为是碰撞一部分的接触点 瞬间静止(
r
˙
c
+
=
J
c
u
+
=
0
\dot{r}_{c}^{+}={{J}_{c}}{{u}^{+}}=0
r˙c+=Jcu+=0)
将该碰撞后约束与运动积分方程相结合,可以求解出冲力为:
通过考虑定义impulse = mass * speed 的基本力学来更详细地分析这种形式,我们确定在支撑点处看到的惯性为所谓的末端执行器惯性:

将(3.67)代入(3.66)可得广义速度的瞬时变化:

再次使用之前介绍的动态一致支持零空间投影仪
N
c
{{N}_{c}}
Nc的命名法,碰撞后广义速度由

通过满足碰撞后接触约束得到的结果是直观的:Using the support null-space projector Nc , the pre-impact velocity u− is projected onto the support consistent manifold.
Energy Loss
接触情况的瞬时变化总是与动能损失有关。这可以在广义坐标中量化,或者作为末端执行器惯性和支撑点速度变化的函数