目录
- 1、kill、raise、abort函数
- 2、代码示例
橙色
1、kill、raise、abort函数
/*
#include <sys/types.h>
#include <signal.h>
int kill(pid_t pid, int sig);
- 功能:给任何的进程或者进程组pid, 发送任何的信号 sig
- 参数:
- pid :
> 0 : 将信号发送给指定的进程
= 0 : 将信号发送给当前的进程组
= -1 : 将信号发送给每一个有权限接收这个信号的进程
< -1 : 这个pid=某个进程组的ID(12345)取反 (-12345),表示要给序号为12345的进程组发送信号
- sig : 需要发送的信号的编号或者是宏值,0表示不发送任何信号
kill(getppid(), 9);//杀死当前进程的父进程
kill(getpid(), 9); //杀死当前进程
int raise(int sig);
- 功能:给当前进程发送信号
- 参数:
- sig : 要发送的信号
- 返回值:
- 成功 0
- 失败 非0
void abort(void);
- 功能: 发送SIGABRT信号给当前的进程,杀死当前进程
*/
2、代码示例
#include <stdio.h>
#include <sys/types.h>
#include <signal.h>
#include <unistd.h>
int main() {
pid_t pid = fork();
if(pid == 0) {
// 子进程
int i = 0;
for(i = 0; i < 5; i++) {
printf("child process\n");
sleep(1);
}
} else if(pid > 0) {
// 父进程
printf("parent process\n");
sleep(2);
printf("kill child process now\n");
kill(pid, SIGINT);
}
return 0;
}
结果如下:
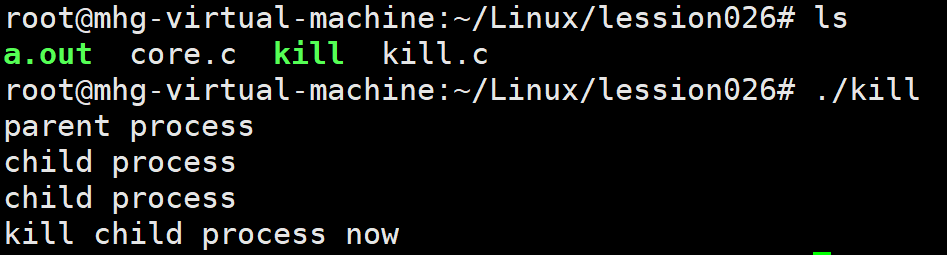
child process可能打印两次,也可能打印三次