2023年的深度学习入门指南(14) - 不能只关注模型代码
最近,有一张大模型的发展树非常流行:
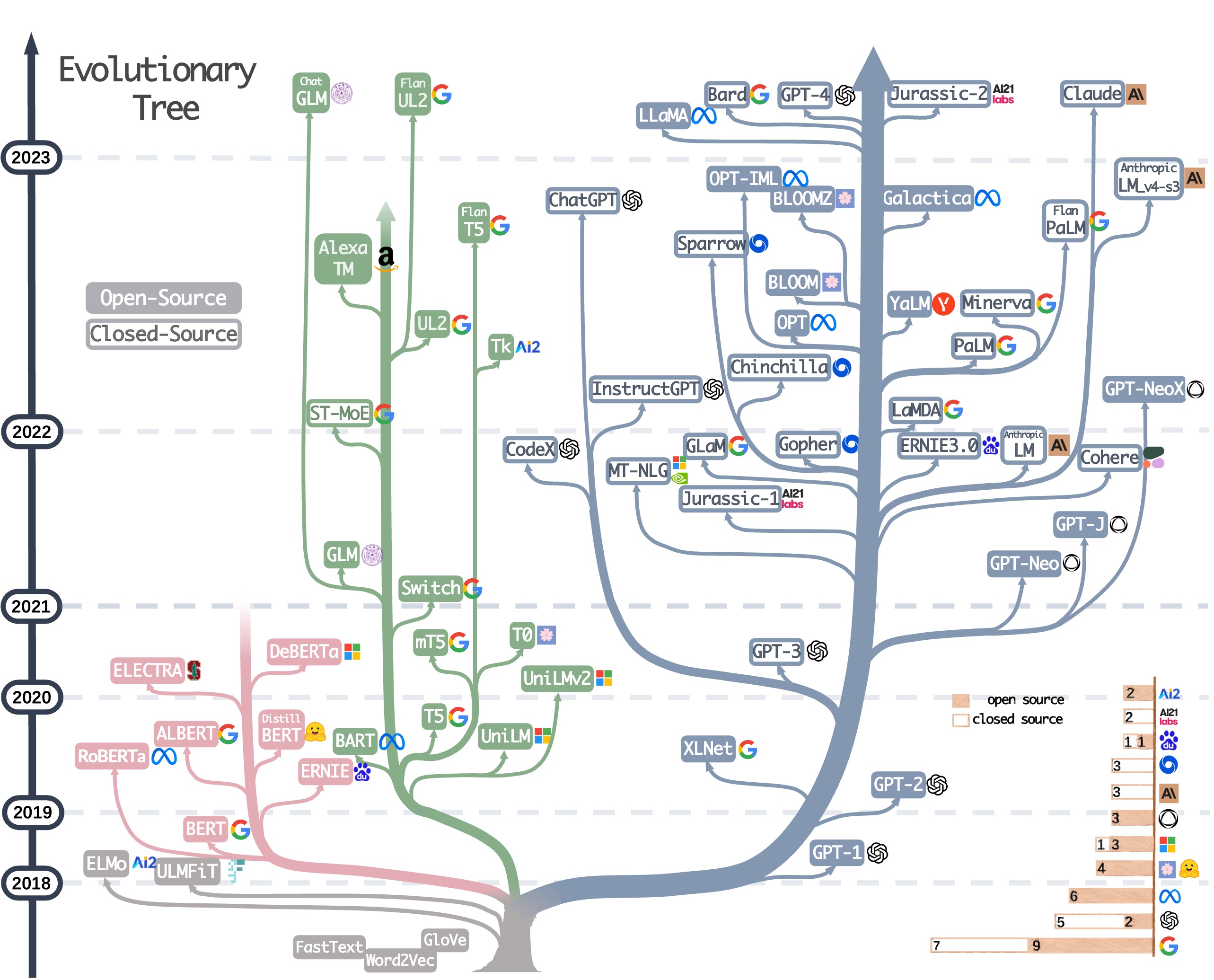
这个图是相当不错的,对于加深对于Transformer模型编码器、解码器作用的理解,模型的开源和闭源情况等等都相当有帮助,大家使用Hugging Face库的时候,也可以从这张图入手寻找相应的模型。
但是,这篇论文是分为三部分的,除了模型之外,还有数据和下游任务两部分。它们被忽视的重要原因是没有一张像上面一样的图。
而且,即使是在图上的部分,也并不一定是模型本身有升级,而可能是增加了其他的东西。
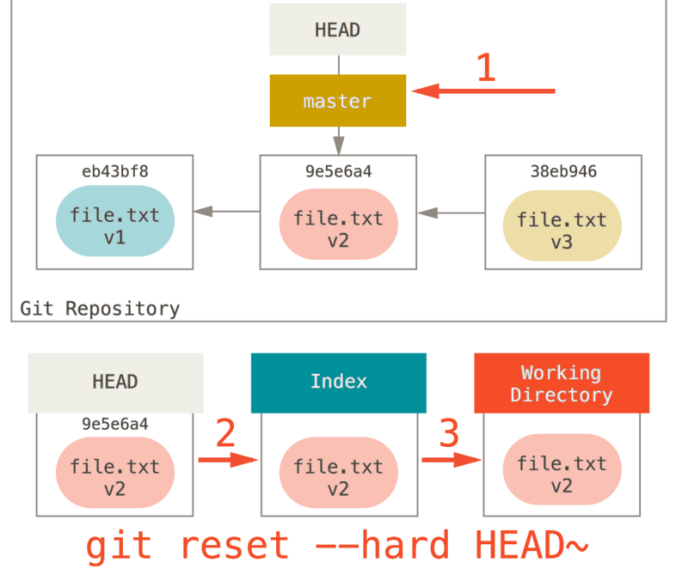
比如从GPT-3到InstructGPT这一个发展,并不是增加了模型大小,而是基于GPT-3进行了跟人类打标的数据做对齐。
人类指导强化学习并不容易
假如现在给你一个任务,让你发明一套武功叫做太极拳。如果你成功发明出来一个动作跟真实的太极拳一样,就给你加一分。这就是一个强化学习的任务。对于大多数人来说,我们既不是武当张真人,也没有达摩祖师一样的天赋,究我们一生可能一个动作也发明不出来。
如果想让我们能完成这个任务,就需要写个拳谱,或者更进一步,有演示录像。我们参照录像学习,这就是一个人类指导的强化学习的过程。
不过,录像有可能只看到正面,看不到侧面和背面,就算是完美模拟,仍然可能有错误。这时候最好的办法是有老师可以指点一下哪里不对,然后继续练习。
好,现在我们换成当老师的角色,假如我们要教100个学生学习打太极拳,遇到他们每一次出错都要指导纠正,指导一次可能还不够,学生学了后面的还可能忘了前面的。这是不是相当花精力的事情?比如要教100万个学生呢?
我们来看一下Instruct GPT是如何做到的。
有监督的微调
在第一篇的时候,我们已经粗略的看了一眼Instruct GPT的步骤图。经历了对于基础知识和编程实战的历练,现在是时候挑战下原理部分了。
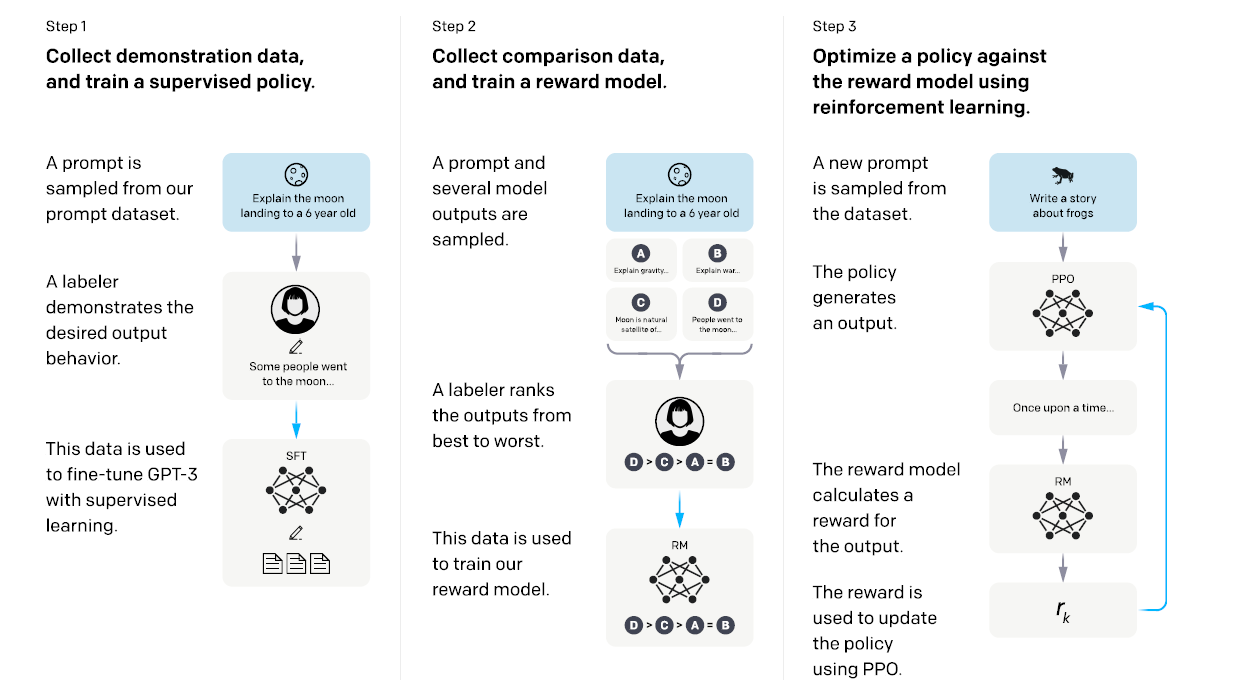
请注意,人类打标的工作是分两部分的:
第一部分是根据问题,由人类写答案。然后用来对大模型进行微调。这一步被称为SFT,有监督的微调。
第二部分是根据模型生成的几个答案,由人类进行排序。人类排序的结果用于训练强化学习的奖励模型。
在准备人类写的答案的时候,OpenAI也是充分动了脑筋的,他们设计了三种情况:
- 纯文本:就是正常平时大家聊家的一问一答的方式。
- few-shot:这其实就是我们学习prompt工程常用到的方式。给出一个指令,然后给出若干组供模型学习的例子。举个例子,指令是英译中,后面给几对英语和对应的中文的例子。
- 预定义的十大类问题:
- 生成(generation)
- 开放式问答(open QA)
- 封闭式问答(closed QA)
- 头脑风暴(brainstorming)
- 聊天(chat)
- 改写(rewriting)
- 摘要(summarization)
- 分类(classification)
- 提取(extraction)
- 其他(other)
我们来看几个例子。
- 头脑风暴:列出五个重拾职业热情的想法
- 封闭式问答:回答以下问题:地球的形状是什么? A) 圆形 B) 球形 C) 椭圆形 D) 平面
- 开放式问答:如何对正弦函数求导?
- 生成:写一个关于一只棕熊去海滩,与一只海豹交朋友,然后返回家的简短故事
人类排序的奖励模型
第二部分,由模型生成,而人来进行排序。模型生成4到9个结果,然后由人类来进行排序。
我们将模型生成的结果记为K,则打标者需要进行
(
K
2
)
\left(\begin{array}{c}K \\ 2\end{array}\right)
(K2)次比较。
我们来看下奖励模型的损失函数:
loss
(
θ
)
=
−
1
(
K
2
)
E
(
x
,
y
w
,
y
l
)
∼
D
[
log
(
σ
(
r
θ
(
x
,
y
w
)
−
r
θ
(
x
,
y
l
)
)
)
]
\operatorname{loss}(\theta)=-\frac{1}{\left(\begin{array}{c} K \\ 2 \end{array}\right)} E_{\left(x, y_w, y_l\right) \sim D}\left[\log \left(\sigma\left(r_\theta\left(x, y_w\right)-r_\theta\left(x, y_l\right)\right)\right)\right]
loss(θ)=−(K2)1E(x,yw,yl)∼D[log(σ(rθ(x,yw)−rθ(x,yl)))]
怕公式的同学不要慌,我来分步解释下,这只是形式化地描述了下,其中并不涉及高深的数学或者机器学习的理论。
其中,x表示输入,
y
w
y_w
yw是排序赢了的输出,
y
l
y_l
yl是输的了。
r是奖励函数,参数为
θ
\theta
θ。
于是, r θ ( x , y ) r_\theta(x, y) rθ(x,y)是奖励模型对提示 x x x和完成 y y y的标量输出。
σ \sigma σ 是 sigmoid 函数,将输出值映射到 ( 0 , 1 ) (0, 1) (0,1) 之间。这表示一个概率,即在给定一对比较时,优选完成 y w y_w yw 被选中的概率。
然后取对数,因为对数损失(或者叫交叉熵损失)是优化分类问题的常用方式,它可以直接优化预测的概率。
1 ( K 2 ) \frac{1}{\left(\begin{array}{c}K \\ 2\end{array}\right)} (K2)1 表示归一化因子,用于在不同大小的比较集合之间进行平衡。
E ( x , y w , y l ) ∼ D E_{\left(x, y_w, y_l\right) \sim D} E(x,yw,yl)∼D 表示在数据集 D D D 上的期望值。 D D D 是包含人类比较的数据集。如果你不理解数学期望的话,这其实就是平均值。
最后,损失函数是所有
(
K
2
)
\left(\begin{array}{c}K \\ 2\end{array}\right)
(K2)个比较的平均对数损失的相反数,取相反数是因为在优化过程中,我们希望最小化损失,而不是最大化损失。
在训练过程中,模型会学会在给定一对完成时,预测人类标签者更可能选择哪个完成。
总结起来一句人话就是:我们希望选择参数 θ \theta θ,使得 r θ ( x , y w ) − r θ ( x , y l ) r_\theta(x, y_w) - r_\theta(x, y_l) rθ(x,yw)−rθ(x,yl)尽可能大。也就是让人类选择的结果获取更高的分。
人类指示的强化学习
好,前两步搞明白了,我们讲最后的强化学习。这里使用到了PPO算法。
这里的强化学习部分只是给大家一个概念,用如此小的篇幅能讲明白就见鬼了。大家理解目标在哪里就好,后面我们会用相当的篇幅来详细介绍。
PPO算法
PPO是Proximal Policy Optimization的缩写,是一种策略梯度方法,用于解决强化学习中的策略优化问题。
PPO算法的主要思想是:在策略更新过程中,要确保新旧策略足够接近,以保证学习的稳定性。这是通过引入一个幅度限制来实现的,新策略不能偏离旧策略太多。正如算法名称中“Proximal”所体现的,优化的新策略始终近似于原策略。

比如,发现了门可以进的策略,以后遇见门就优先选择进。
PPO算法的主要步骤是:
- 定义一个参数化的策略函数 π θ ( a ∣ s ) \pi_\theta (a|s) πθ(a∣s) ,用神经网络来近似。
- 用当前的策略 π θ ( a ∣ s ) \pi_\theta (a|s) πθ(a∣s) 与环境交互,收集一批轨迹数据 { s t , a t , r t , s t + 1 } \{s_t,a_t,r_t,s_{t+1}\} {st,at,rt,st+1} 。
- 计算每个时间步的优势函数 A t A_t At ,用于评估每个动作的好坏。
- 定义一个目标函数 L ( θ ) L (\theta) L(θ) ,用于衡量新策略和旧策略的差异,并加入一个惩罚项来防止更新幅度过大。
- 用梯度下降更新策略参数 θ \theta θ ,使目标函数 L ( θ ) L (\theta) L(θ) 最大化。
- 重复上述步骤,直到策略收敛或达到预设的迭代次数。
PPO算法的主要优点是稳定性高、样本利用率高。相比A2C、ACKTR等方法,PPO可以更快、更稳定地找到较优策略,这使其适合处理许多在线和离线强化学习问题。
回到我们的微调中来,我们构建一个赌博环境,它会呈现一个随机的客户提示,并期望对该提示做出回应。根据提示和回应,它会通过奖励模型生成一个奖励,并结束该回合。此外,我们在每个令牌上添加了来自SFT模型的逐令牌KL惩罚,以减轻对奖励模型的过度优化。价值函数从RM进行初始化。我们将这些模型称为“PPO”。
KL散度
下面还得先补充一个概念,KL散度。
假设你有两个食谱,一个是你跟你妈学的,另一个是你在网上找到的。你按照这两个食谱分别做了两个菜,然后你想知道这两个菜有多相似。你可能会看看它们的颜色、形状、味道等等,然后给出一个"相似度"的评分。这个评分就是KL散度。如果这两个菜完全一致,那么KL散度就是0。如果不一样,那么就是一个大于0的数,差异越大,KL散度的数值越大。
KL散度(KL divergence)是信息论中的一个重要概念, 全名是Kullback-Leibler divergence。它是用来度量两个概率分布之间差异的一种方法。
上面的解释其实还不够说明KL散度的信息论上的含义。
假设你是一个男生,高考报志愿想去一个女生多的专业。你在网上查,某学校的英语专业的男生与女生的比例是1:9。于是兴冲冲报了这个专业。结果当你入学了之后发现,这个专业竟然一个女生都没有,你是不是会特别惊讶?
这个"惊讶度",就是KL散度要衡量的东西。
从信息论的角度来看,如果你在入学前查到是1:9,入学后发现真是1:9,那么你就没有获得新的信息。但是你发现是10:0,说明你获得了巨大的信息量。
如果你入学后发现,没有1:9那么夸张,但是也达到了3:7,女多男少的情况是真的。你就不会特别惊讶。这时候你获得的信息量比较小,KL散度也比较小。
所以简单地说,KL散度衡量从一个概率分布转到另一个分布,你需要获得多少新的信息,或者另一个分布会给你带来多大的惊讶。如果两个分布很接近,转变不需要新的信息,KL散度很小。如果两个分布很不同,转变需要很多新的信息来减少惊讶,KL散度就比较大。
故事听完了,我们上公式 _
KL散度的定义如下:对于两个概率分布P和Q,P的KL散度相对于Q是:
K L ( P ∣ ∣ Q ) = ∑ x P ( x ) log P ( x ) Q ( x ) KL(P||Q) = \sum_x P(x) \log \frac{P(x)}{Q(x)} KL(P∣∣Q)=x∑P(x)logQ(x)P(x)
它有以下几个重要性质:
-
KL散度是非对称的,即 K L ( P ∣ ∣ Q ) ≠ K L ( Q ∣ ∣ P ) KL(P||Q) \neq KL(Q||P) KL(P∣∣Q)=KL(Q∣∣P)。它度量的是 P P P相对于 Q Q Q的信息量。
-
KL散度总是非负的, K L ( P ∣ ∣ Q ) ≥ 0 KL(P||Q) \geq 0 KL(P∣∣Q)≥0。只有当P和Q完全相同时, K L ( P ∣ ∣ Q ) = 0 KL(P||Q)=0 KL(P∣∣Q)=0。
-
KL散度衡量的是两个分布的差异,而不是距离。它表达的是 P P P相对于 Q Q Q丢失或获得的信息量。
-
KL散度并不满足三角不等式。
KL散度有许多应用,主要用于量化概率分布之间的差异,或者作为损失函数的一部分。例如:
- 机器翻译中,限制神经机器翻译与统计机器翻译的差异。
- 变分推断中,测量后验分布与概率模型的差异,并最小化。
- 评估生成模型的性能,比如GAN、VAE等。
所以总的来说,KL散度是一个非常有用的工具,用于衡量和控制概率分布之间的差异程度。在许多机器学习模型和算法中有重要应用。
将强化学习和预训练结合起来
我们还尝试将预训练梯度混合到PPO梯度中,以修复在公共NLP数据集上的性能回归。我们将这些模型称为"PPO-ptx"。在RL训练中,我们最大化以下组合目标函数:
objective ( ϕ ) = E ( x , y ) ∼ D π ϕ R L [ r θ ( x , y ) − β log ( π ϕ R L ( y ∣ x ) / π S F T ( y ∣ x ) ) ] + γ E x ∼ D pretrain [ log ( π ϕ R L ( x ) ) ] \begin{aligned} \operatorname{objective}(\phi)= & E_{(x, y) \sim D_{\pi_\phi^{\mathrm{RL}}}}\left[r_\theta(x, y)-\beta \log \left(\pi_\phi^{\mathrm{RL}}(y \mid x) / \pi^{\mathrm{SFT}}(y \mid x)\right)\right]+ \\ & \gamma E_{x \sim D_{\text {pretrain }}}\left[\log \left(\pi_\phi^{\mathrm{RL}}(x)\right)\right] \end{aligned} objective(ϕ)=E(x,y)∼DπϕRL[rθ(x,y)−βlog(πϕRL(y∣x)/πSFT(y∣x))]+γEx∼Dpretrain [log(πϕRL(x))]
这个公式定义了PPO-ptx模型的优化目标(objective function)。它由两部分组成:
-
强化学习部分:
E ( x , y ) ∼ D π ϕ R L [ r θ ( x , y ) − β log ( π ϕ R L ( y ∣ x ) / π S F T ( y ∣ x ) ) ] E_{(x, y) \sim D_{\pi_\phi^{\mathrm{RL}}}}\left[r_\theta(x, y)-\beta \log \left(\pi_\phi^{\mathrm{RL}}(y \mid x) / \pi^{\mathrm{SFT}}(y \mid x)\right)\right] E(x,y)∼DπϕRL[rθ(x,y)−βlog(πϕRL(y∣x)/πSFT(y∣x))]
这部分的含义是:在强化学习得到的轨迹分布 D π ϕ R L D_{\pi_\phi^{\mathrm{RL}}} DπϕRL下,计算每个时间步的奖励 r θ ( x , y ) r_\theta(x, y) rθ(x,y)与KL惩罚 β log ( π ϕ R L ( y ∣ x ) / π S F T ( y ∣ x ) ) \beta \log \left(\pi_\phi^{\mathrm{RL}}(y \mid x) / \pi^{\mathrm{SFT}}(y \mid x)\right) βlog(πϕRL(y∣x)/πSFT(y∣x)),并取均值。KL惩罚的作用是限制强化学习策略与监督学习策略的差别。
这个项前的系数 β \beta β是KL奖励系数,用于控制KL惩罚的强度。 -
预训练部分:
γ E x ∼ D pretrain [ log ( π ϕ R L ( x ) ) ] \gamma E_{x \sim D_{\text {pretrain }}}\left[\log \left(\pi_\phi^{\mathrm{RL}}(x)\right)\right] γEx∼Dpretrain [log(πϕRL(x))]
这部分的含义是:在预训练数据分布 D pretrain D_{\text {pretrain }} Dpretrain 下,计算强化学习策略的对数似然,并与超参数 γ \gamma γ相乘,作为预训练损失加入到总的优化目标中。
所以总的来说,这个优化目标在强化学习的同时,也利用预训练数据继续训练模型,以修复强化学习在一些NLP数据集上的性能问题。 β \beta β和 γ \gamma γ是控制KL惩罚项和预训练损失项强度的超参数。
小结
Chatgpt的成功,跟人类对齐的技术功不可没。
比起用越来越多的数据和越来越强大的算力堆更大的模型,人类打标的工作不管从方案设计上,学习技术上,还是执行上,都是一样费时费力且琐碎的事情。
训练好的大模型是一件充满挑战且要耐得住烦的工作。