项目名称:空地协同编队控制系统建设项目
场 地:室内/室外
关 键 词:自主导航与SLAM、集群协同决策、集群控制
南京理工大学核心案例(1)
01
项目背景
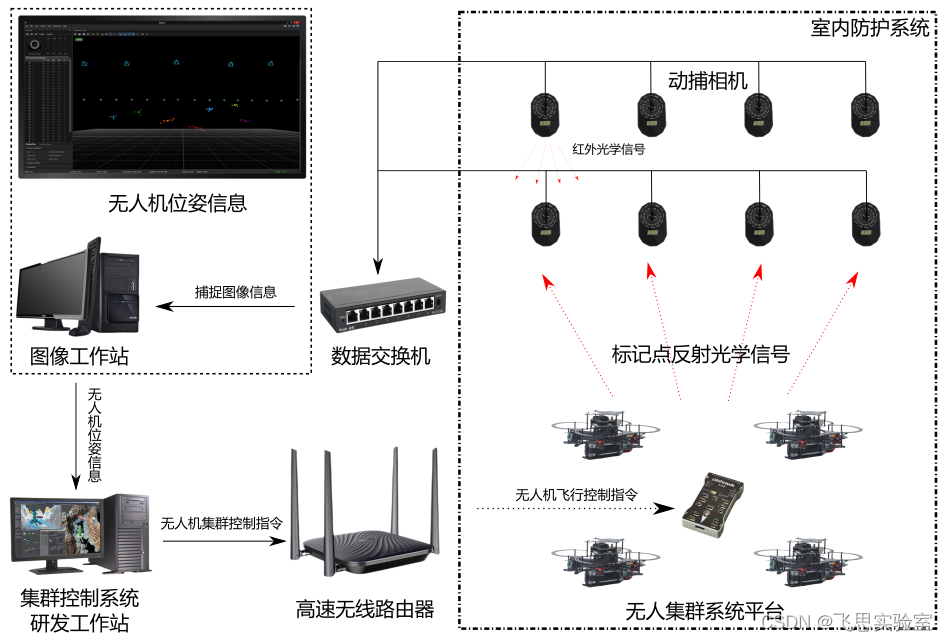
本项目通过集群四旋翼无人机、天地协同集群控制开发环境、无人机协同集群控制系统软件、课程课件体系等,构成了一套高效、精确、具备完善的二次开发功能的,一体化无人机集群协同教学及科研平台。

该专业化的无人机集群协同科研平台方案,具备成熟稳定、容易上手、开源开放等优势。通过平台的应用,可实现:
1.具有弱通信条件下空中引导地面无人车机动的功能;
2.具有弱通信条件下无人机自主跟随无人车的功能;
3.具有无人机自主降落至无人车上的功能,RTK引导降落;
4.具有无人车/无人机/车机协同编队运行的功能;
5.无人车/无人机具有自主避障功能;
6.无人车/无人机具有弱通信条件下自主定位导航功能,可支持RTK定位、视觉惯性定位功能;
飞思无人机集群协同科研平台方案高效助力教学科研,为各大高校和科研院所提供完整的服务支持,为高校和科研院所在相关课题研究方面取得更有深度的突破和科研成果,提供更好的环境支撑。
02
项目内容
系统组成
①飞思X450无人机平台

轴距500mm,续航20min
②飞思X350无人机平台
 轴距350mm,续航20min
轴距350mm,续航20min
③飞思ROVER-300无人车平台

④无人机协同集群控制系统软件
平台优势
多智能体集群协同研发平台整体系统性能需求体现在以下方面:
(1)统一性
平台框架支持扩展到所有的无人控制系统,形成一个标准的自动开发、测试与评估框架体系,且集群研发与实飞验证平台可与无人系统仿真研发平台无缝连接。
(2)易用性
集群协同教研平台开放性高,接口丰富,支持C、C++、Python、ROS、Matlab/Simulink等多种编程环境。可以很方便地进行二次开发。还可根据用户的实际需求定制整个系统平台,并提供相应的技术支撑和详细的例程和说明书指导。满足用户的个性化和差异化需求,使平台更加契合用户的使用特点和习惯,提升体验感和交互率,减少用户熟悉平台的时间成本,大大提高用户的开发效率和体验。
(3)丰富性
兼容的定位系统丰富,涵盖目前主流的室内外定位方式。可提供光学定位系统、UWB定位系统、激光定位系统、GPS、RTK等多种定位平台,定位系统覆盖面积可根据客户要求定制;同时可提供多款轴距及载重不同的无人机(飞思X150、飞思X200,飞思X350,飞思X450,飞思X680)和无人车(飞思C1);支持WIFI、数传、数据链等多种集群通讯方式。
03
应用方向
①无人系统编队控制算法设计与验证
②多无人系统协同编队控制
③信息感知技术
④数据融合技术
⑤任务分配技术
⑥航迹规划技术
⑦编队控制技术
⑧通信组网技术
⑨数字孪生技术