目录
resetCan -- 重置CAN控制器
代码示例
ResetCanEx -- 重置CAN控制器的特定CAN通道
代码示例
ScanBaudrateActive -- 特定通道设置波特率
ScanBaudratePassive -- 开始扫描并检测给定通道上的波特率
resetCan -- 重置CAN控制器

功能:重置CAN控制器,可用于在 BUSOFF 后重置 CAN 控制器或激活配置更改。 由于该功能的执行需要一些时间,并且 CAN 控制器会短暂地与总线断开连接,因此执行此操作时可能会丢失消息。
注意:使用该函数,可以重置 CAN1 和 CAN2; 如果只使用一个特定的 CAN 通道,resetCan 会因错误而停止并且 CAN 通道保持离线状态。 在这种情况下,必须使用 ResetCanEx 函数,函数 resetCanEx 可用于所有通道。
代码示例
//BUSOFF 后控制器复位
on key 'r'
{
resetCan();
}
ResetCanEx -- 重置CAN控制器的特定CAN通道

功能:将一个特定CAN 控制器的 CAN 通道重置 ; 可用于在 BUSOFF 后重置 CAN 控制器或激活配置更改。 由于该功能的执行需要一定的时间,并且 CAN 控制器与总线断开连接的时间很短,因此在此期间的报文可能会丢失。
channel:CAN通道
代码示例
// BUSOFF 后,通道 2 上的控制器被重置
on key 'r'
{
resetCanEx(2);
}
ScanBaudrateActive -- 特定通道设置波特率

功能:该函数确定给定通道的波特率, 函数的结果被写入write窗口
说明:波特率扫描器检查不同的波特率并尝试通过给定的通道发送消息。 如果消息发送成功并确定了波特率,则该功能完成。 如果存在错误的波特率,则其他电源接受器无法接收到消息。 作为发送器的 CANoe 没有收到确认并发送一个错误帧。 在这种情况下,将检查波特率范围的下一个波特率。
channel:CAN通道(1, 2, 3, ... 32)
messageID:扫描仪将发送以检测波特率的消息 ID。 消息的 DLC 始终为 8。
firstBaudrate / lastBaudrate:要扫描的波特率范围。如果两个值都设置为零,则扫描器会检查最常用的波特率:33.333、50.0、83.333、100.0、125.0、250.0、500.0、1000.0 [千波特]
如果两个值相同但不为零,则扫描器将波特率乘以给定因子(值范围 0.25-5.0)。 该因子以 0.25 的步长变化。如果两个值不同,则扫描范围内所有可能的波特率值。范围内的增量步长为 1.5%。
timeout:发送消息时扫描器等待的时间段 [ms]。
返回值:
0:如果扫描功能成功启动,则返回 0
!=0:否则返回值为非零
注意:
波特率扫描器的 CAN.INI 文件设置:
[BaudrateScanner]
Dlc=8
DisplayBaudrateList=0Dlc:扫描仪发送的消息的 DLC,默认值:8
DisplayBaudrateList:如果此值设置为 0,则波特率扫描器在找到第一个波特率后停止。如果该值不为零,则扫描器会检查所有波特率并在末尾显示一个值列表。
默认值:0
实际网络上应用的波特率应在不存在通信的情况下确定。 在这种情况下,CANoe 是网络上的参与者 - 在线节点。

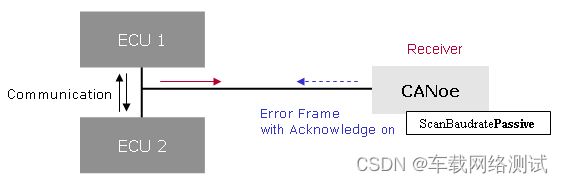
ScanBaudratePassive -- 开始扫描并检测给定通道上的波特率

功能:开始扫描并检测给定通道上的波特率。
说明:波特率扫描器检查不同的波特率并尝试在通道上接收消息。 函数开始扫描并检测给定通道上的波特率。 函数的结果被写入写入窗口。
如果存在错误的波特率,CANoe 无法接收消息并发送一个错误帧,可以使用参数 bAcknowledge 将其放在总线上。
channel:CAN通道(1, 2, 3, ... 32)
messageID:扫描仪将发送以检测波特率的消息 ID。 消息的 DLC 始终为 8。
firstBaudrate / lastBaudrate:要扫描的波特率范围。如果两个值都设置为零,则扫描器会检查最常用的波特率:33.333、50.0、83.333、100.0、125.0、250.0、500.0、1000.0 [千波特]
如果两个值相同但不为零,则扫描器将波特率乘以给定因子(值范围 0.25-5.0)。 该因子以 0.25 的步长变化。如果两个值不同,则扫描范围内所有可能的波特率值。范围内的增量步长为 1.5%。
timeout:发送消息时扫描器等待的时间段 [ms]。
bAcknowledge:
确认模式开启 (1)/关闭 (0)。
如果存在错误的波特率,CANoe 无法接收消息并发送一个错误帧,可以使用参数 bAcknowledge 将其放在总线上。
该参数用于 CANoe - 作为被动接收器 - 可以通过发送错误帧间接参与网络通信。
该参数不会更改硬件配置对话框的确认设置。 该参数仅在函数运行时有效。
返回值:
0:如果扫描功能成功启动,则返回 0
!=0:否则返回值为非零
注意:
波特率扫描器的 CAN.INI 文件设置:
[BaudrateScanner]
Dlc=8
DisplayBaudrateList=0Dlc:扫描仪发送的消息的 DLC,默认值:8
DisplayBaudrateList:如果此值设置为 0,则波特率扫描器在找到第一个波特率后停止。如果该值不为零,则扫描器会检查所有波特率并在末尾显示一个值列表。
应根据存在的通信确定实际网络上应用的波特率。 在这种情况下,CANoe 是网络上的被动参与者 - 接收器 - 它通过 Y 型电缆连接到网络。