输出比较
电机相关比较重要。
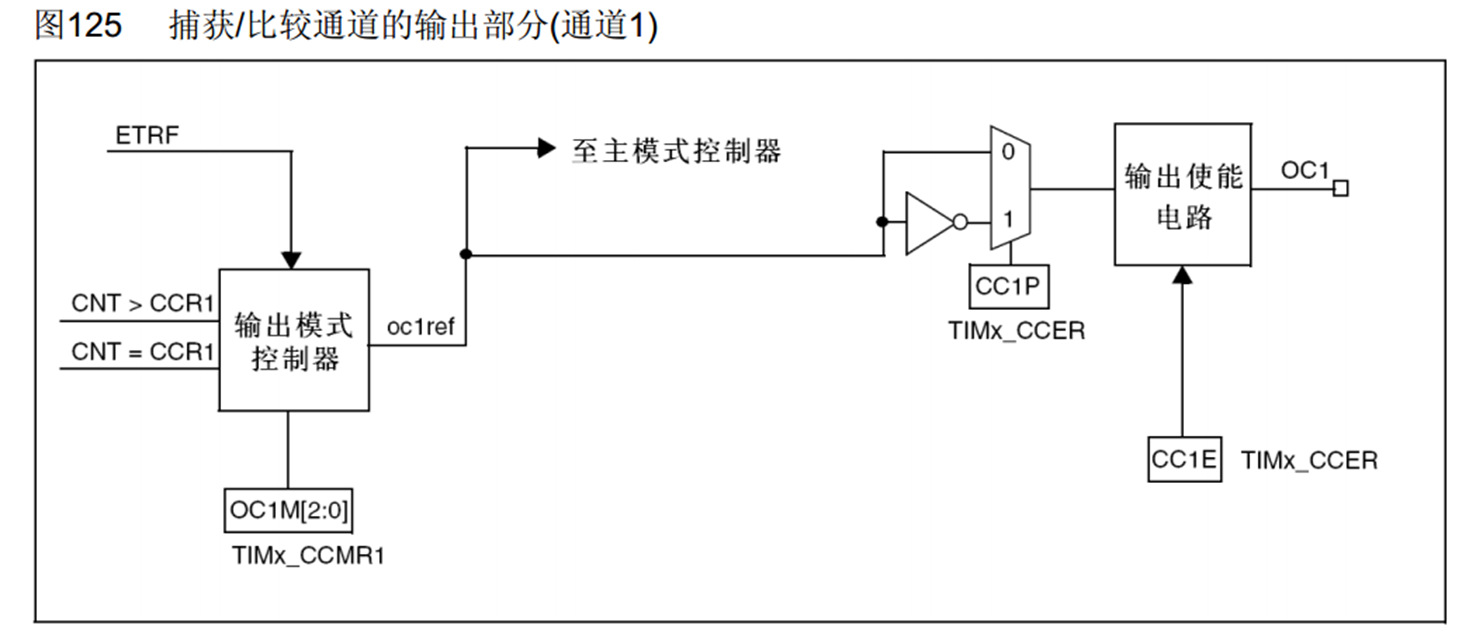
OC Output Compare(IC 是输入捕获,CC代指这两个单元),用于输出一定频率和占空比的PWM波形。
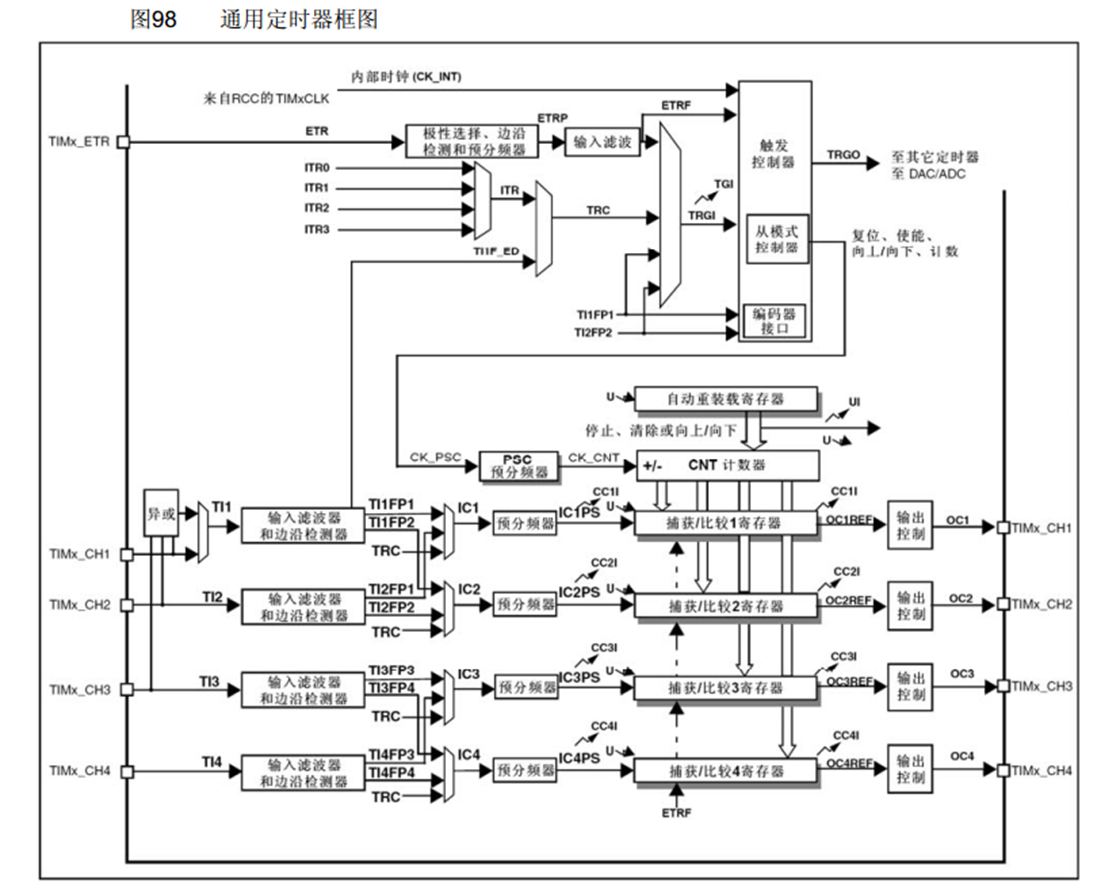
右下角四个就是CCR。只有通用计时器和高级计时器有,共用一个cnt计数器,高级计数器的前三个ccr寄存器还有死区比较和互补输出功能,可以驱动三相电机。
PWM(Pulse Width Modulation)脉冲宽度调制,在具有惯性的系统中,可以通过对一系列脉冲的宽度进行调制,来等效地获得所需要的模拟参量,常应用于电机控速等领域。
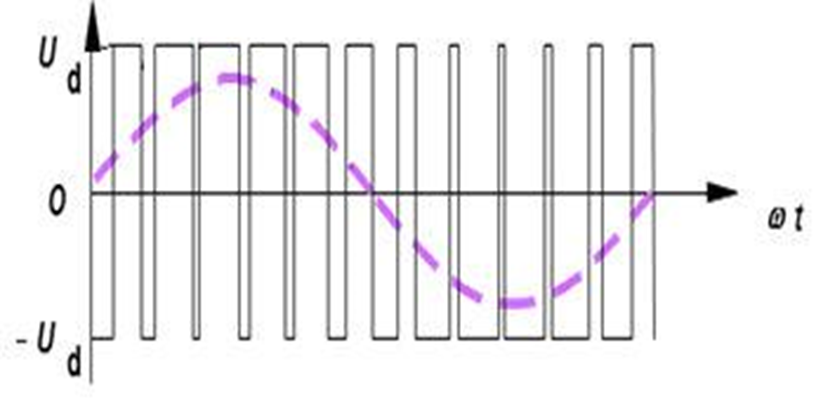
按一定频率置0置1,可以改变电机综合速度。LED也是,我们人眼看着就觉得灯有亮度,实际上就是按一定频率闪烁就会呈现不同的亮度。
周期Ts,占空比Ton/Ts(置1的时间占总周期比例),频率=周期倒数,分辨率是占空比变化步距。
输入模式:
| 模式 | 描述 |
|---|---|
| 冻结 | CNT=CCR时,REF保持为原状态 |
| 匹配时置有效电平 | CNT=CCR时,REF置有效电平 |
| 匹配时置无效电平 | CNT=CCR时,REF置无效电平 |
| 匹配时电平翻转 | CNT=CCR时,REF电平翻转 |
| 强制为无效电平 | CNT与CCR无效,REF强制为无效电平 |
| 强制为有效电平 | CNT与CCR无效,REF强制为有效电平 |
| PWM模式1 | 向上计数:CNT<CCR时,REF置有效电平,CNT≥CCR时,REF置无效电平 向下计数:CNT>CCR时,REF置无效电平,CNT≤CCR时,REF置有效电平 |
| PWM模式2 | 向上计数:CNT<CCR时,REF置无效电平,CNT≥CCR时,REF置有效电平 向下计数:CNT>CCR时,REF置有效电平,CNT≤CCR时,REF置无效电平 |
强制模式比如断开输入的时候。
TIMx_CCER里也可以设置极性。
整体处理逻辑:
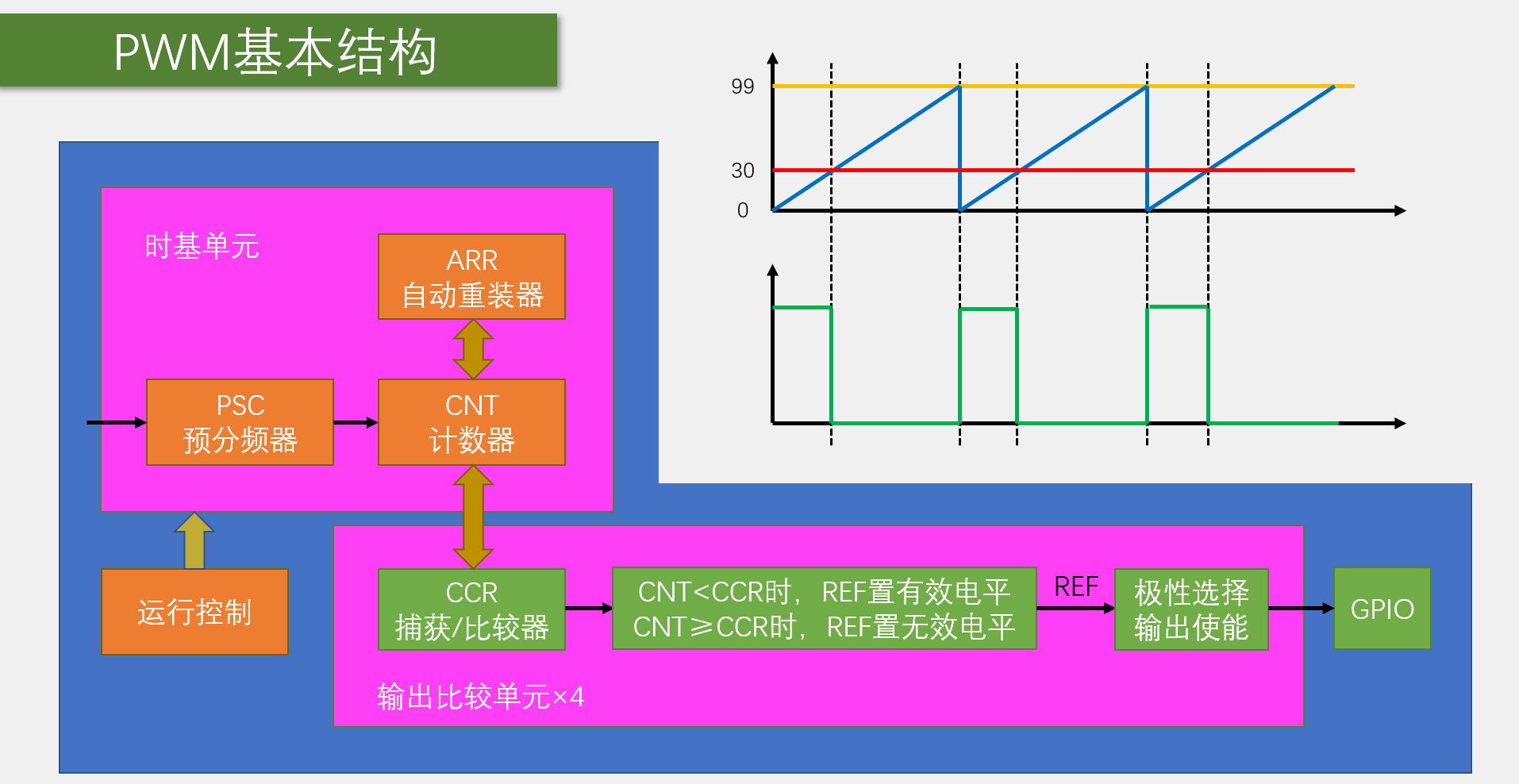
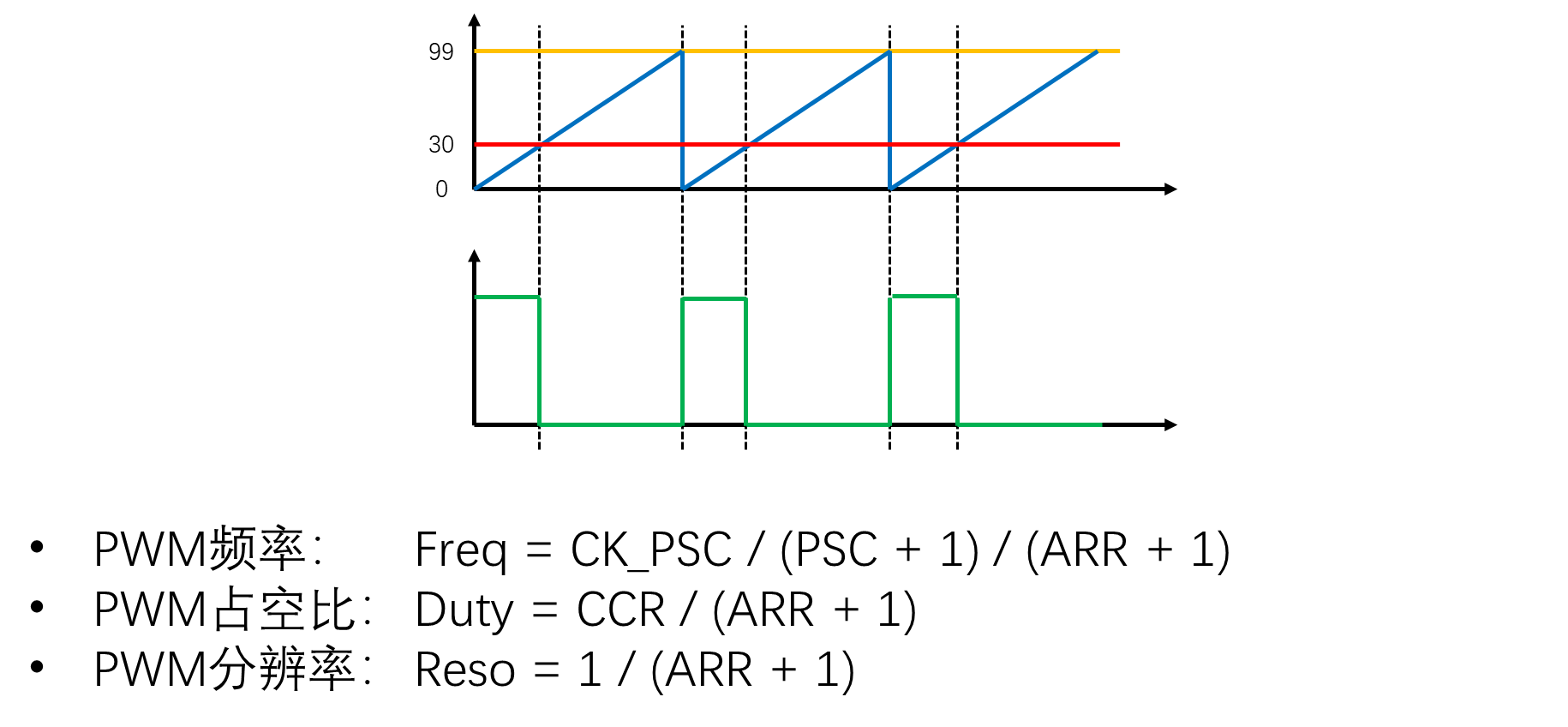
频率周期和普通定时器一样,占空比也很好理解。
分辨率就是arr的最小值的倒数。
至于高级计时器,暂时简单了解其区别即可:
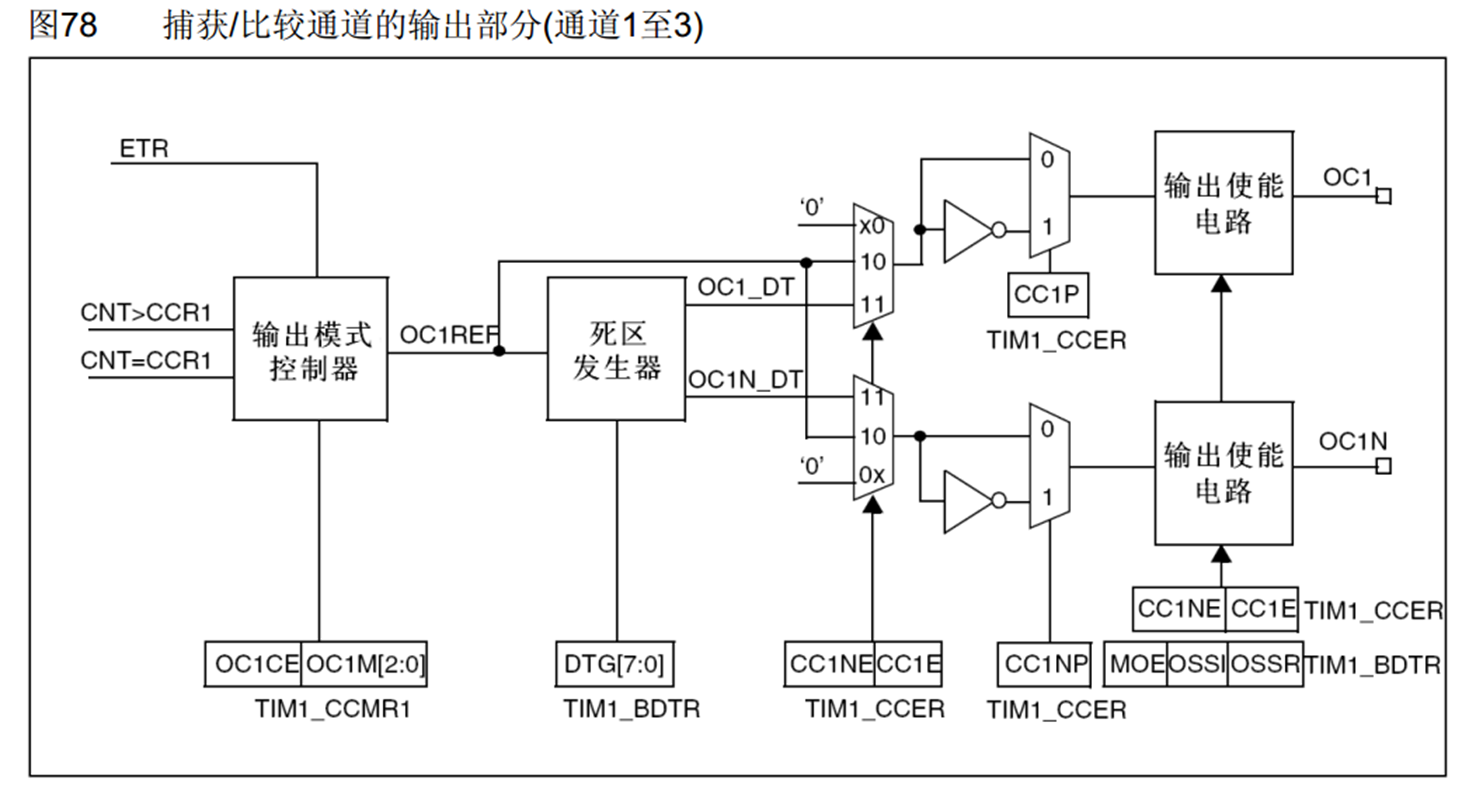
两个互补输出可以接到推挽电路上,死区生成电路使得两管切换有一定延迟。
舵机:输入一个角度,舵机停止在固定角度。周期20ms,高电平宽度0.5-2.5ms。
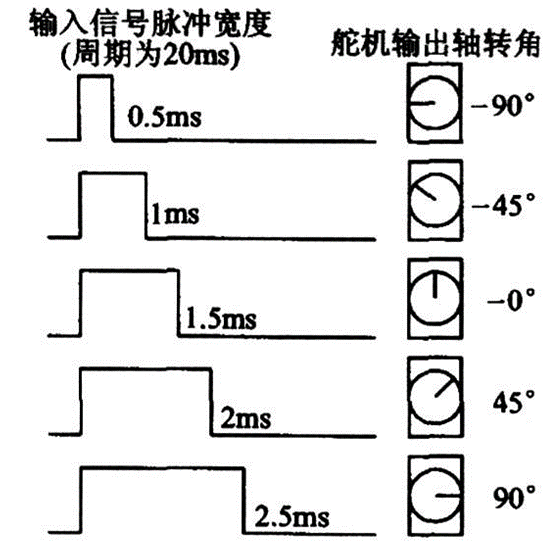
舵机三个角,±极,信号线。(5V)信号线内部有驱动电路,所以可以直接接。
直流电机正向流正向转,反向电流反向转。无法直接驱动,需要依靠 TB6612 芯片驱动。
由两个推挽电路构成,一个H型电路,中间是电机。电流从左上到右下和右上到左下正好流经中间是相反的。
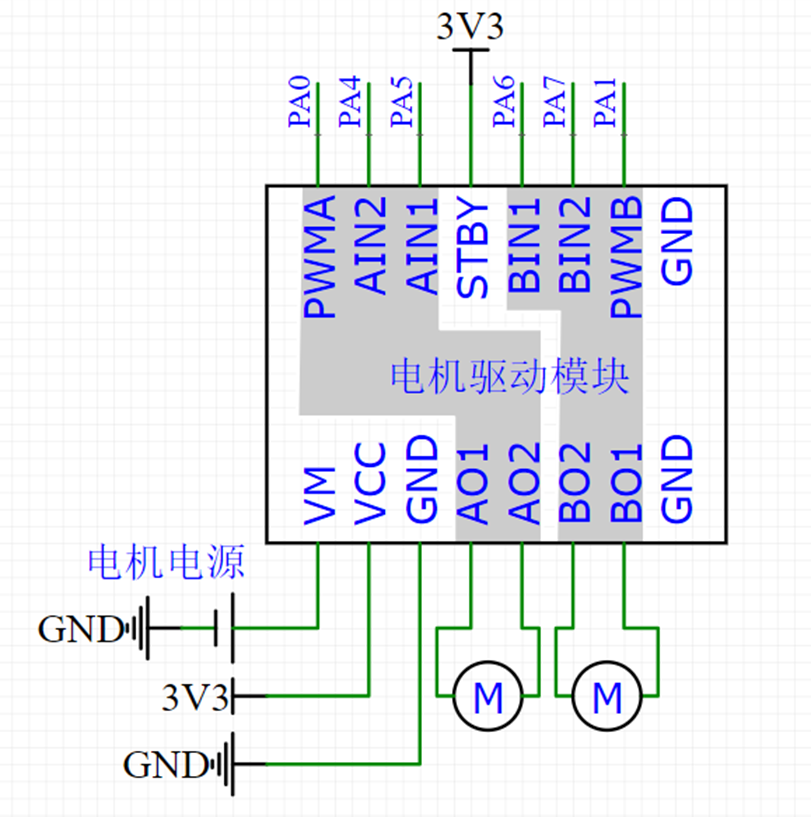
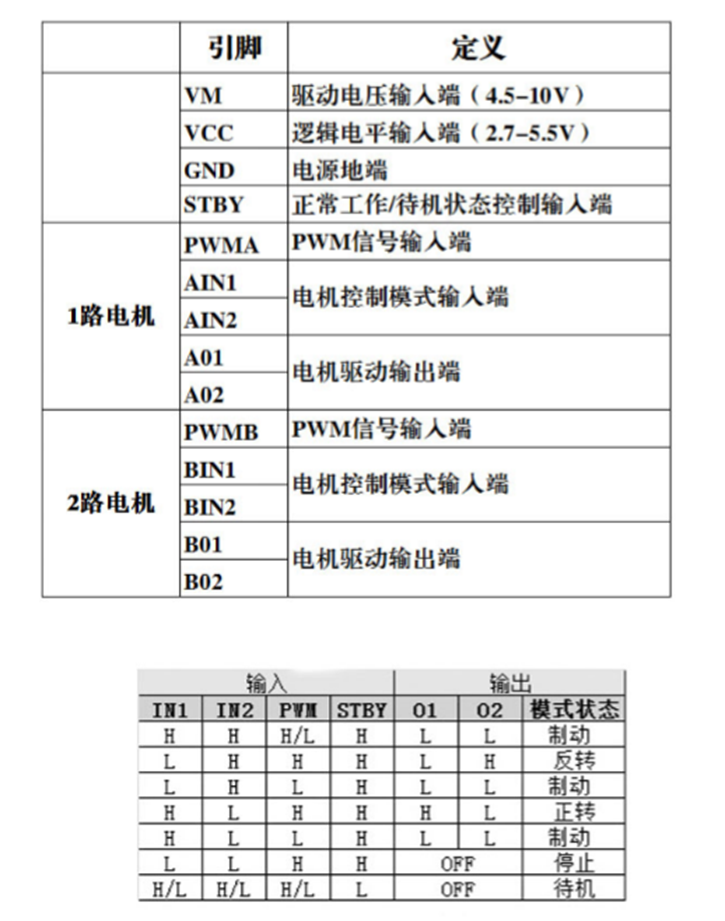
VM:驱动电路。
VCC:控制电路,比如我们32的3.3v。
PWMA PWMB是两个信号端,另外两个引脚可以接任意GPIO口。PWM 控制频率的改变,IN一直保持一个状态即可。
STNDBY 待机控制引脚,接地待机,接VCC工作。
代码:PWM LED呼吸灯
打开TIM GPIO,配置时基单元,配置输出比较单元(CCR值,模式,极性选择,使能输出),配置推挽输出GPIO,启动计数器。
函数:

初始化和赋初值。

强制输出,但是可以被占空比100% 0%替代,所以不常用。

先加载到影子寄存器中。并不会立刻更新ccr。

快速使能,清除ref。

设置输出通道极性,N是互补。这里的设置在初始化时就全做了,这些函数是可以单独修改的。

单独设置输出使能参数。

单独设置输出比较模式。

单独修改ccr寄存器,这个比较重要,比如呼吸灯,占空比是一直改变的。

这个是使能高级定时器会用。
这里选用哪个引脚是有依据的:
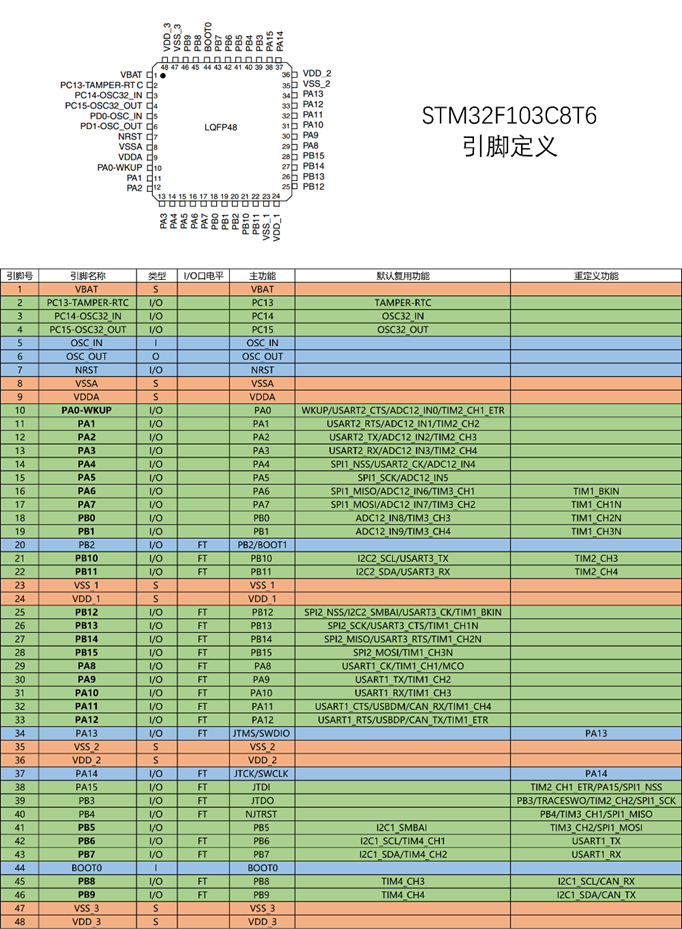
PA0是TIM2,CH1的引脚。也可以用AFIO复用其他引脚,避免冲突。
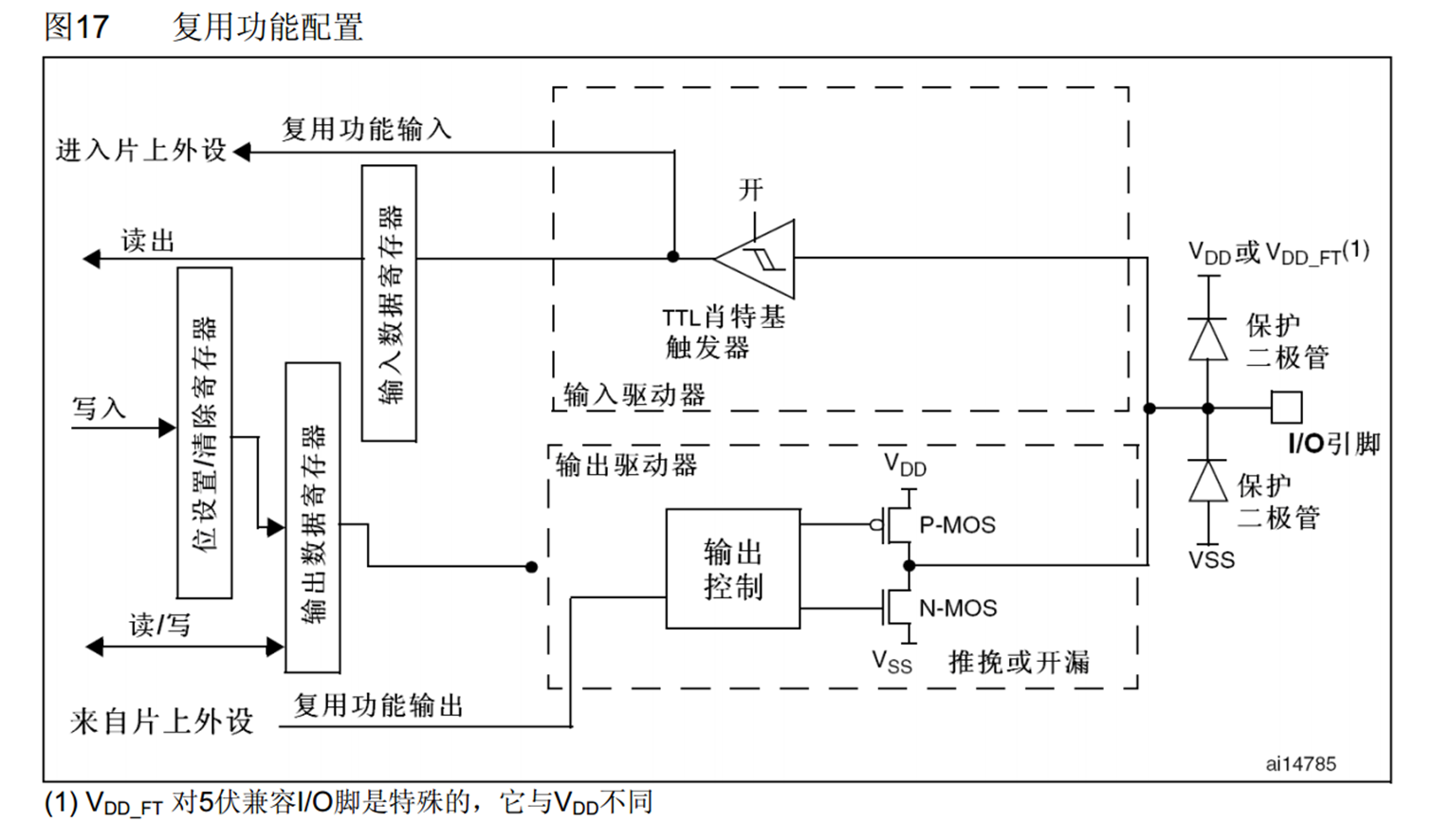
GPIO 要设置成复用功能 AF_PP 方可断开数据寄存器引脚,连接复用功能。
首先我们写一个简单的初始化函数,给定ccr寄存器值,让pwm输出是不会变化的固定值,这样显示的结果是led的亮度随着我们给的ccr值而变亮/暗。
void PWM_Init(void){
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_0;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
TIM_InternalClockConfig(TIM2);
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up;
TIM_TimeBaseInitStructure.TIM_Period=100-1;
TIM_TimeBaseInitStructure.TIM_Prescaler=720-1;
TIM_TimeBaseInitStructure.TIM_RepetitionCounter=0;
TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure);
//PA0对应定时器2,oc channel1.
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_OCStructInit(&TIM_OCInitStructure);//防止漏赋初值出错,而且再更改想改的赋值简单一些
TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OCNPolarity=TIM_OCNPolarity_Low;
TIM_OCInitStructure.TIM_OCPolarity=TIM_OCPolarity_High;
TIM_OCInitStructure.TIM_OutputState=TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse=50;//ccr
TIM_OC1Init(TIM2,&TIM_OCInitStructure);
TIM_Cmd(TIM2,ENABLE);
}
设置周期100,ccr的值/100就是占空比,当前设置为50%亮度。设置10就是10%亮度。
用 keil 自带示波器看一下a0输出波形:
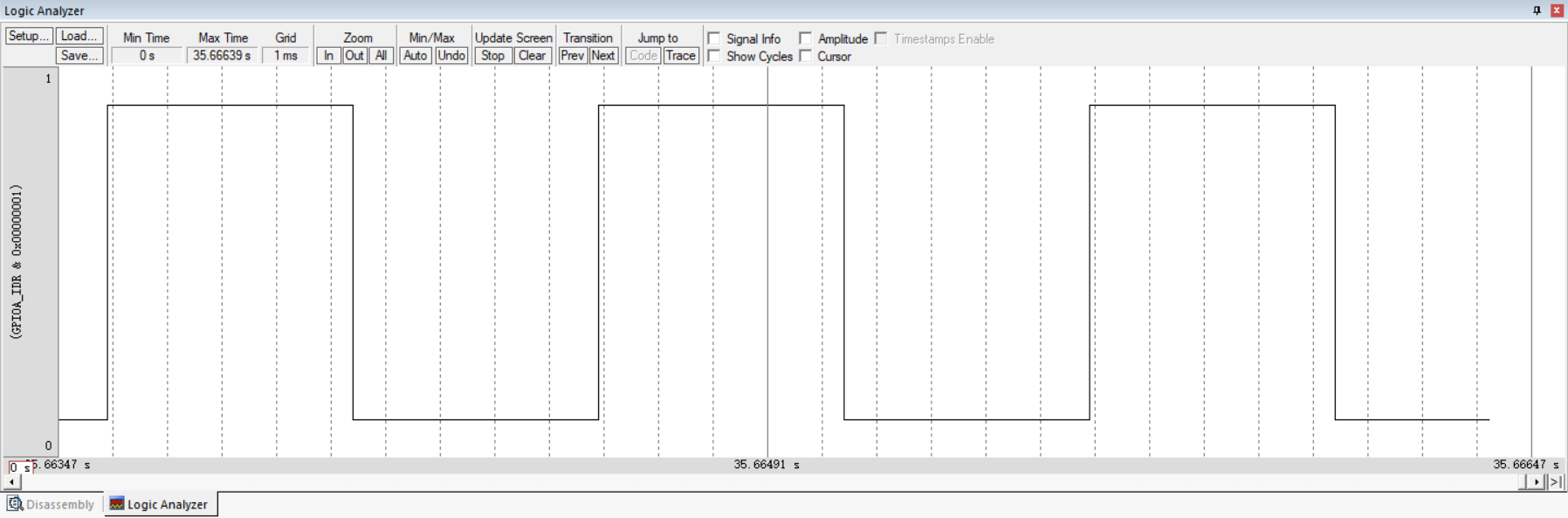
可以通过 TIM_SetCompare1(TIM2,i); 改变ccr值。
while(1){
for(i=0;i<100;i++){
TIM_SetCompare1(TIM2,i);
Delay_ms(10);
}
for(i=100;i>0;i--){
TIM_SetCompare1(TIM2,i);
Delay_ms(10);
}
}
引脚重映射
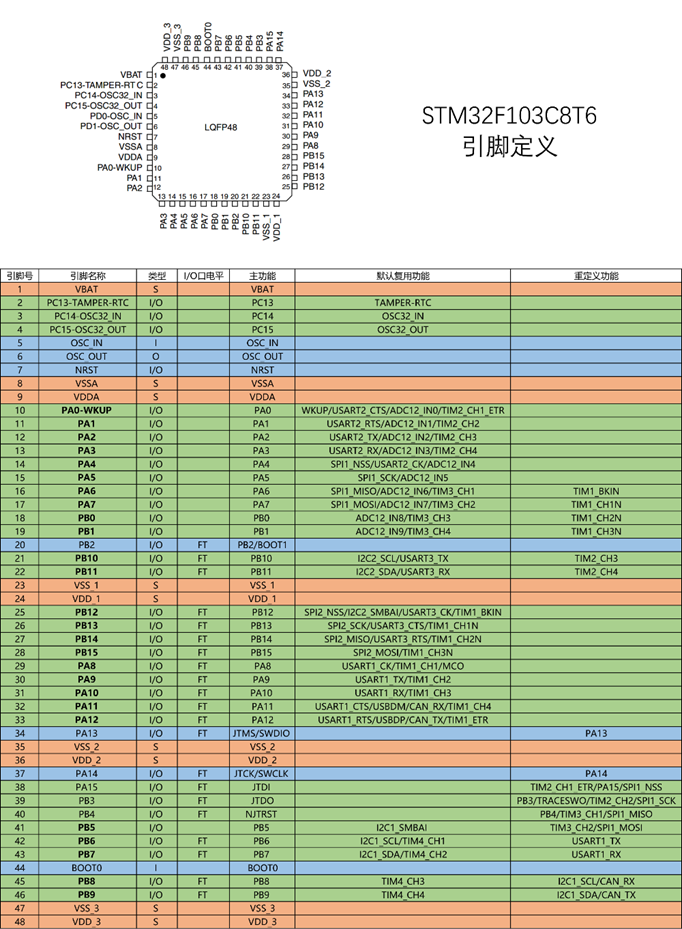
如图,TIM2_CH1可以重映射到PA15上。
首先需要开启 AFIO, RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);
前面介绍过 AFIO 重映射函数:void GPIO_PinRemapConfig(uint32_t GPIO_Remap, FunctionalState NewState) ,第一个参数选取什么呢?
数据手册里说:
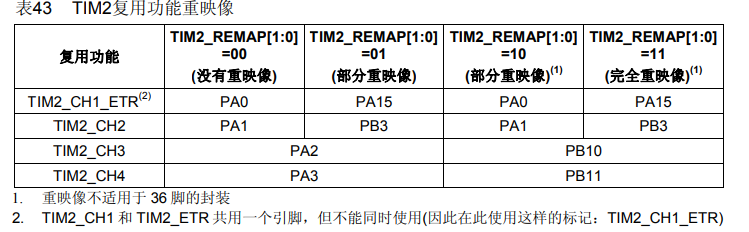

所以我们选择部分重映像1或完全重映像都行。
然后我们需要取消PA15原来的功能:

第一个:只取消NoJTRST调试的,也就是PB4.
第二个:取消PA15,PB3,PB4这三个JTAG调试端口。
第三个:解除JTAG和SWJ的端口,千万千万千万千万不能用,因为一旦烧录了,我们的板子就再也没法通过stlink下载了。需要用串口处理了。
代码上只是改了GPIO Pin,增加了AFIO重映射。
void PWM_Init(void){
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);
GPIO_PinRemapConfig(GPIO_PartialRemap1_TIM2,ENABLE);
GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable,ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_15;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
TIM_InternalClockConfig(TIM2);
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up;
TIM_TimeBaseInitStructure.TIM_Period=100-1;
TIM_TimeBaseInitStructure.TIM_Prescaler=720-1;
TIM_TimeBaseInitStructure.TIM_RepetitionCounter=0;
TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure);
//PA0对应定时器2,oc channel1.
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_OCStructInit(&TIM_OCInitStructure);//防止漏赋初值出错,而且再更改想改的赋值简单一些
TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OCNPolarity=TIM_OCNPolarity_Low;
TIM_OCInitStructure.TIM_OCPolarity=TIM_OCPolarity_High;
TIM_OCInitStructure.TIM_OutputState=TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse=50;//ccr
TIM_OC1Init(TIM2,&TIM_OCInitStructure);
TIM_Cmd(TIM2,ENABLE);
}
代码:PWM舵机
5V接在stlink上,不要接在面包板上。
和LED呼吸灯相比,可以通过固定的占空比比值来确定旋转角度。

频率:1/20ms=50Hz, 即72M/(arr+1)*(psc+1)=50
ccr和arr+1成一定比例。比如period设置为200-1; psc设置为7200-1; 则ccr按比例可以设为5 10 15 20 25.
当然这样的角度不是很直观,我们可以写一个封装函数,传入角度,转动相应角度。
代码:直流电机
需要用到电机驱动模块。
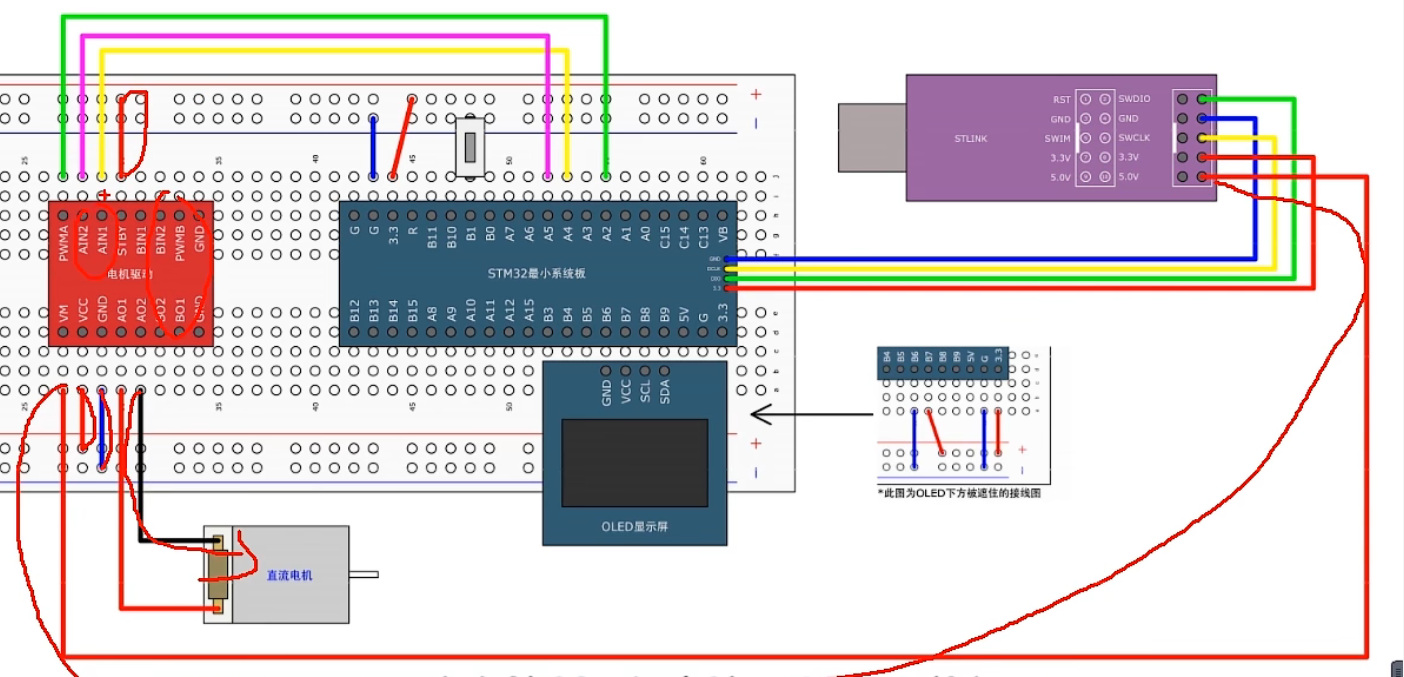
AN控制方向,随便接GPIO,PWMA接PWM输出。
和之前的输出比较没啥区别,还是我们给定一个ccr参数控制速度。AN的两个GPIO脚要初始化,初始化后一个SetBits一个ResetBits,来控制转向。
void Motor_Init(){
//方向控制的引脚:AN设置
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_4|GPIO_Pin_5;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
PWM_Init();
}
void Motor_SetSpeed(int8_t speed){
if(speed>0){
//方向脚一高一低
GPIO_SetBits(GPIOA, GPIO_Pin_4);
GPIO_ResetBits(GPIOA, GPIO_Pin_5);
TIM_SetCompare3(TIM2,speed);
}
else{
GPIO_SetBits(GPIOA, GPIO_Pin_5);
GPIO_ResetBits(GPIOA, GPIO_Pin_4);
TIM_SetCompare3(TIM2,-speed);
}
}
转动时有蜂鸣器般的噪声,可以通过调大频率解决,也就是prescaler和period参数调小点,频率就大了。


![如何使用单片机点亮LED灯,并使用按键控制[51单片机]](https://img-blog.csdnimg.cn/84f6c2c344da47019b624fdb69c0f96a.png)