目录
- 背景
- 方案
- 一:汇总所有推课的功能
- 二:设置推课机器人的方法
- 三:方法之间的关系
- 四:方法合并
- 五:方法汇总
- 总结
背景
现在我们开始设计第三版AR***,我负责的部分是推课部分,在领导的一步步引导之下慢慢做出符合要求的产品
方案
现在功能是老师进行推课,现在在后端代码设计一个推课机器人,代替老师的职责,进行推课。
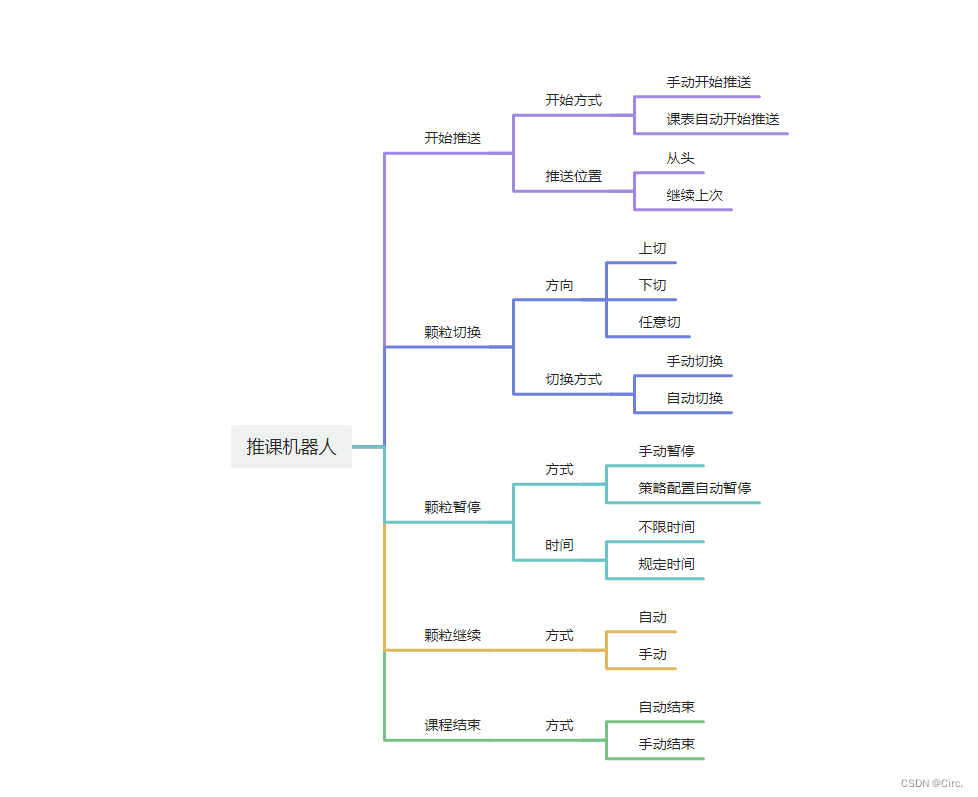
一:汇总所有推课的功能
二:设置推课机器人的方法
手动从头开始推送
手动继续上次推送
手动上切
手动下切
手动任意切
自动下切
手动不限时间暂停
手动限定时间暂停
颗粒自动继续
颗粒手动继续
课程自动结束
课程手动结束
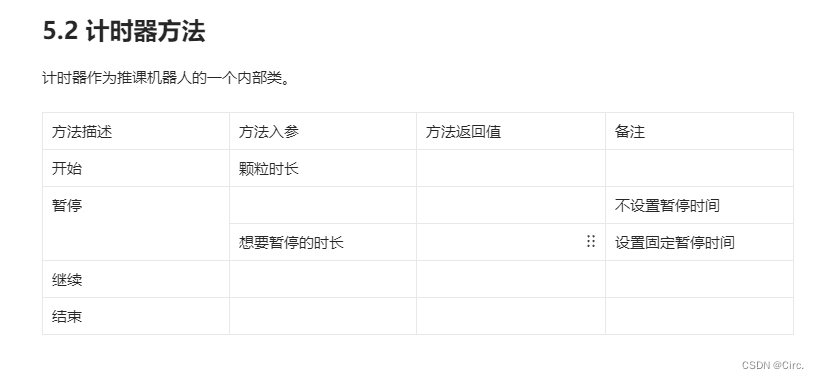
计时器(开始 暂停 继续 结束)
三:方法之间的关系
- 手动从头开始推送 (调用计时器的开始方法(传入头节点信息))
- 手动继续上次推送 (调用计时器的开始方法(传入上次推送节点的信息))
- 手动上切 (调用计时器的开始方法(传入指定节点的信息))
- 手动下切 (调用计时器的开始方法(传入指定节点的信息))
- 手动任意切 (调用计时器的开始方法(传入指定节点的信息))
- 自动下切(计时器结束方法中调用下切方法)
- 手动不限时间暂停(调用计时器的暂停方法)
- 手动限定时间暂停(调用计时器的暂停方法(传入暂停时间))
- 颗粒自动继续(调用计时器的继续方法)
- 颗粒手动继续(调用计时器的继续方法)
- 课程自动结束(调用计时器的结束方法)
- 课程手动结束(调用计时器的结束方法)
四:方法合并
上述方法1和方法2可以写成方法的重载。推送的两种不同形式。
方法6调用方法4
方法7和方法8。写成方法的重载。一个传递暂停的时长,一个不传递暂定的时长
方法9个方法10。是一个方法。只不过一个是计时器调用,一个是前端调用
方法11和方法12。是一个方法。一个是自动下切到最后一个任然下切时调用,一个是前端调用。
五:方法汇总
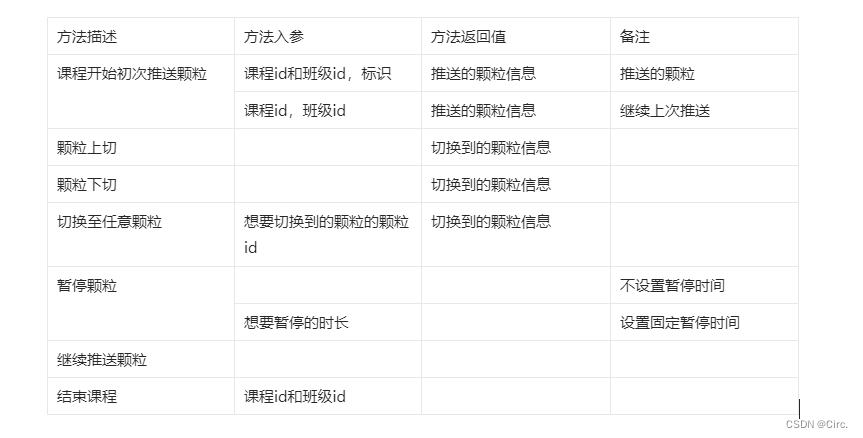

总结
还没干完,稍等~