在训练模型的时候,我们需要将损失函数一直训练到0吗?显然不用。一般来说,我们是用训练集来训练模型,但希望的是验证机的损失越小越好,而正常来说训练集的损失降到一定值后,验证集的损失就会开始上升,因此没必要把训练集的损失降低到0
既然如此,在已经达到了某个阈值之后,我们可不可以做点别的事情来提升模型性能呢?ICML2020的论文《Do We Need Zero Training Loss After Achieving Zero Training Error?》回答了这个问题,不过实际上它并没有很好的描述"为什么",而只是提出了"怎么做"
思路描述
论文提供的解决方案非常简单,假设原来的损失函数是
L
(
θ
)
\mathcal{L}(\theta)
L(θ),现在改为
L
~
(
θ
)
\tilde{\mathcal{L}}(\theta)
L~(θ):
L
~
(
θ
)
=
∣
L
(
θ
)
−
b
∣
+
b
(1)
\tilde{\mathcal{L}}(\theta)=|\mathcal{L}(\theta)-b|+b\tag{1}
L~(θ)=∣L(θ)−b∣+b(1)
其中
b
b
b是预先设定的阈值。当
L
(
θ
)
>
b
\mathcal{L}(\theta)>b
L(θ)>b时
L
~
(
θ
)
=
L
(
θ
)
\tilde{\mathcal{L}}(\theta)=\mathcal{L}(\theta)
L~(θ)=L(θ),这时就是执行普通的梯度下降;而
L
(
θ
)
<
b
\mathcal{L}(\theta)<b
L(θ)<b时
L
~
(
θ
)
=
2
b
−
L
(
θ
)
\tilde{\mathcal{L}}(\theta)=2b-\mathcal{L}(\theta)
L~(θ)=2b−L(θ),注意到损失函数变号了,所以这时候是梯度上升。因此,总的来说就是以
b
b
b为阈值,低于阈值时反而希望损失函数变大。论文把这个改动称为**“Flooding”**
这样做有什么效果呢?论文显示,在某些任务中,训练集的损失函数经过这样处理后,验证集的损失能出现"二次下降(Double Descent)",如下图
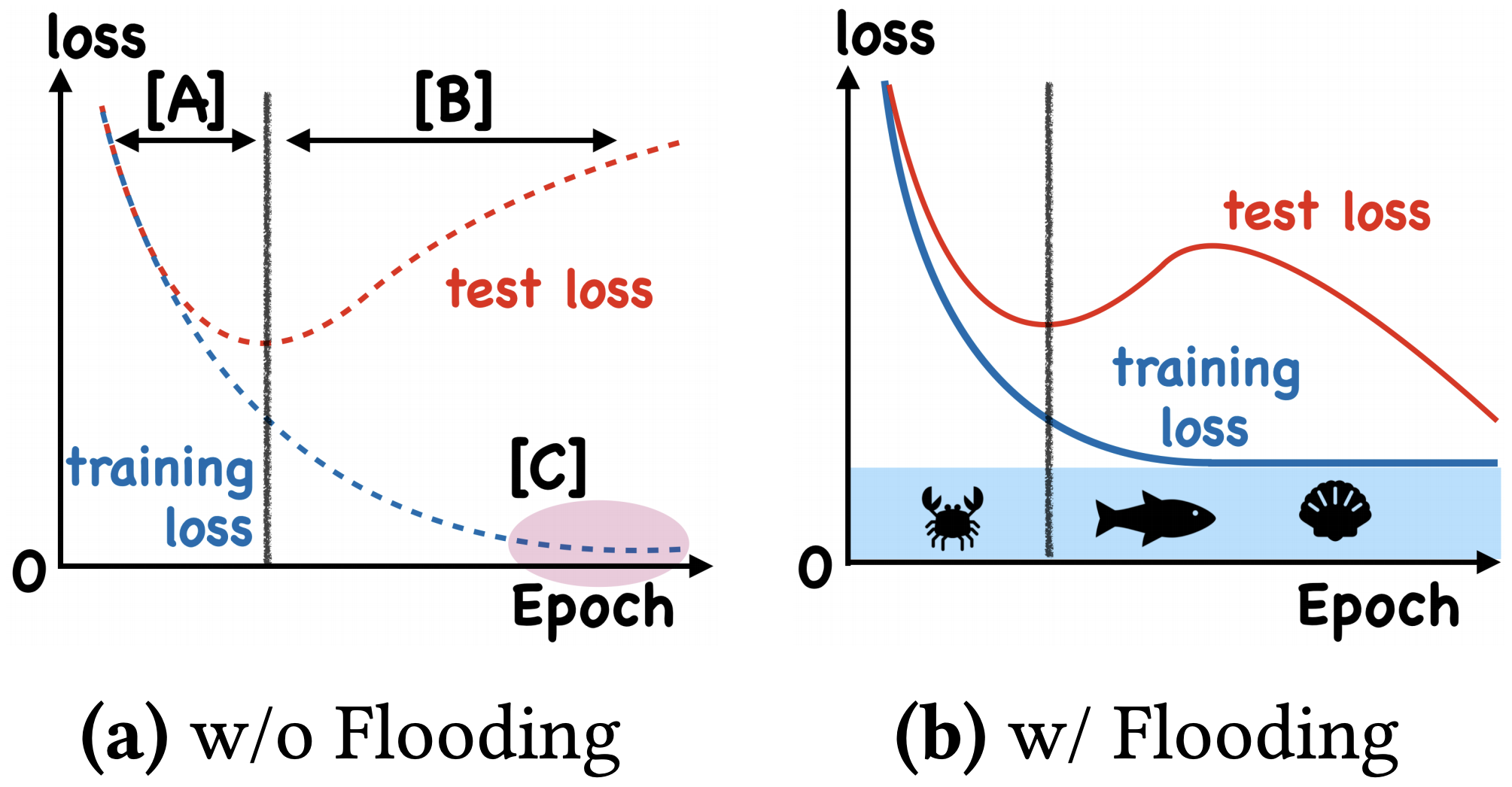
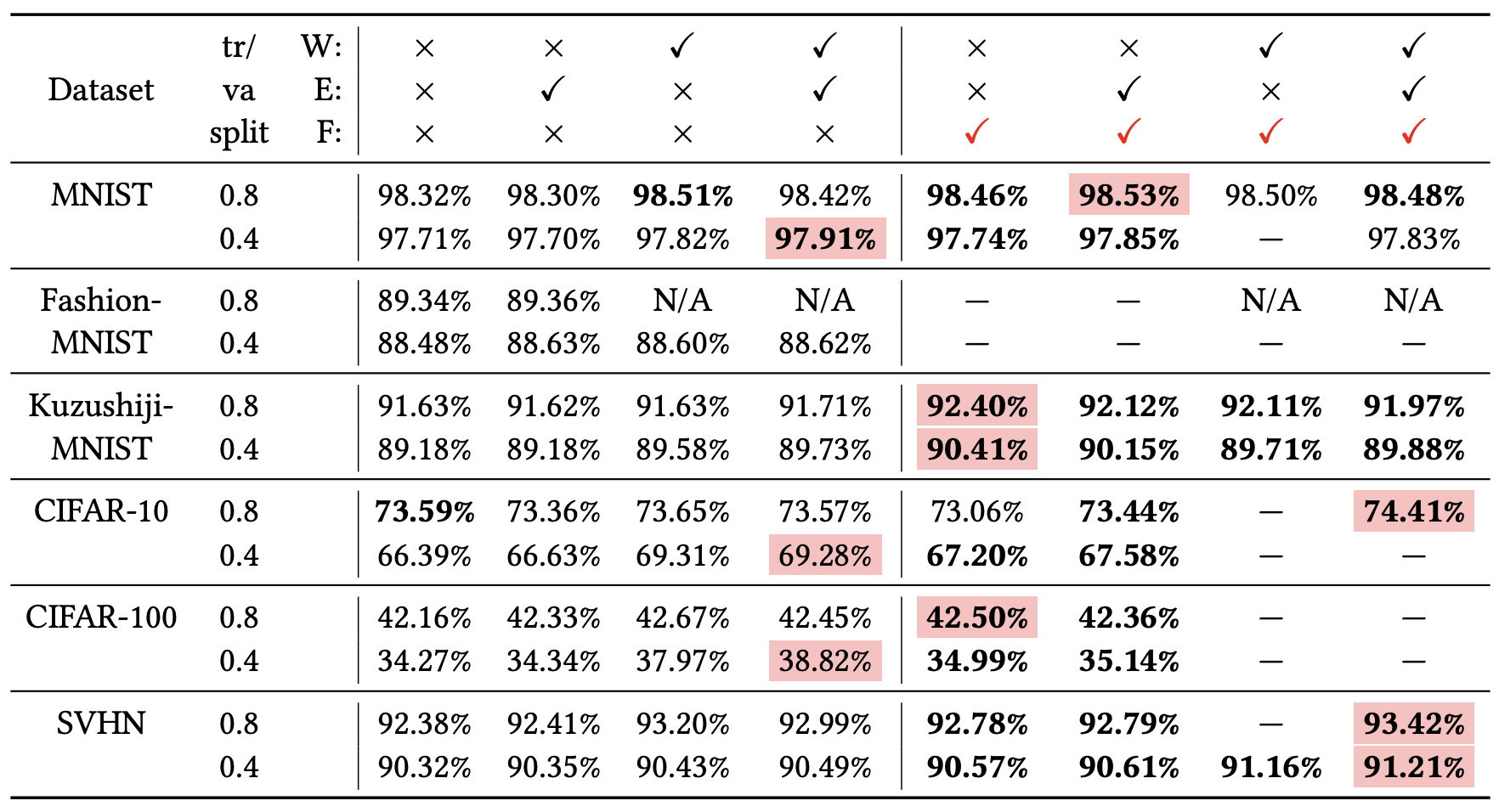
简单来说,就是最终的验证集效果可能更好一些,原论文的实验结果如下:
个人分析
如何解释这个方法呢?可以想像,当损失函数达到
b
b
b之后,训练流程大概就是在交替执行梯度下降和梯度上升。直观想的话,感觉一步上升一步下降,似乎刚好抵消了。事实真的如此吗?我们来算一下看看。假设先下降一步后上升一步,学习率为
ε
\varepsilon
ε,那么:
θ
n
=
θ
n
−
1
−
ε
g
(
θ
n
−
1
)
θ
n
+
1
=
θ
n
+
ε
g
(
θ
n
)
(2)
\begin{aligned}&\theta_n = \theta_{n-1} - \varepsilon g(\theta_{n-1})\\ &\theta_{n+1} = \theta_n + \varepsilon g(\theta_n) \end{aligned}\tag{2}
θn=θn−1−εg(θn−1)θn+1=θn+εg(θn)(2)
其中
g
(
θ
)
=
∇
θ
L
(
θ
)
g(\theta)=\nabla_{\theta}\mathcal{L}(\theta)
g(θ)=∇θL(θ),现在我们有
θ
n
+
1
=
θ
n
−
1
−
ε
g
(
θ
n
−
1
)
+
ε
g
(
θ
n
−
1
−
ε
g
(
θ
n
−
1
)
)
≈
θ
n
−
1
−
ε
g
(
θ
n
−
1
)
+
ε
(
g
(
θ
n
−
1
)
−
ε
∇
θ
g
(
θ
n
−
1
)
g
(
θ
n
−
1
)
)
=
θ
n
−
1
−
ε
2
2
∇
θ
∥
g
(
θ
n
−
1
)
∥
2
(3)
\begin{aligned}\theta_{n+1} =&\, \theta_{n-1} - \varepsilon g(\theta_{n-1}) + \varepsilon g\big(\theta_{n-1} - \varepsilon g(\theta_{n-1})\big)\\ \approx&\,\theta_{n-1} - \varepsilon g(\theta_{n-1}) + \varepsilon \big(g(\theta_{n-1}) - \varepsilon \nabla_{\theta} g(\theta_{n-1}) g(\theta_{n-1})\big)\\ =&\,\theta_{n-1} - \frac{\varepsilon^2}{2}\nabla_{\theta}\Vert g(\theta_{n-1})\Vert^2 \end{aligned}\tag{3}
θn+1=≈=θn−1−εg(θn−1)+εg(θn−1−εg(θn−1))θn−1−εg(θn−1)+ε(g(θn−1)−ε∇θg(θn−1)g(θn−1))θn−1−2ε2∇θ∥g(θn−1)∥2(3)
近似那一步实际上是使用了泰勒展开,我们将 θ n − 1 \theta_{n-1} θn−1看作 x x x, ε g ( θ n − 1 ) \varepsilon g(\theta_{n-1}) εg(θn−1)看作 Δ x \Delta x Δx,由于
g ( x − Δ x ) − g ( x ) − Δ x = ∇ x g ( x ) \frac{g(x - \Delta x) - g(x)}{-\Delta x} = \nabla_x g(x) −Δxg(x−Δx)−g(x)=∇xg(x)
所以
g ( x − Δ x ) = g ( x ) − Δ x ∇ x g ( x ) g(x - \Delta x) = g(x) - \Delta x \nabla_x g(x) g(x−Δx)=g(x)−Δx∇xg(x)
最终的结果就是相当于学习率为 ε 2 2 \frac{\varepsilon^2}{2} 2ε2、损失函数为梯度惩罚 ∥ g ( θ ) ∥ 2 = ∥ ∇ θ L ( θ ) ∥ 2 \Vert g(\theta)\Vert^2 = \Vert \nabla_{\theta} \mathcal{L}(\theta)\Vert^2 ∥g(θ)∥2=∥∇θL(θ)∥2的梯度下降。更妙的是,改为"先上升再下降",其表达式依然是一样的(这不禁让我想起"先涨价10%再降价10%“和"先降价10%再涨价10%的故事”)。因此,平均而言,Flooding对损失函数的改动,相当于在保证了损失函数足够小之后去最小化 ∥ ∇ x L ( θ ) ∥ 2 \Vert \nabla_x \mathcal{L}(\theta)\Vert^2 ∥∇xL(θ)∥2,也就是推动参数往更平稳的区域走,这通常能提高泛化性(更好地抵抗扰动),因此一定程度上就能解释Flooding有作用的原因了
本质上来讲,这跟往参数里边加入随机扰动、对抗训练等也没什么差别,只不过这里是保证了损失足够小后再加扰动
继续脑洞
想要使用Flooding非常简单,只需要在原有代码基础上增加一行即可
logits = model(x)
loss = criterion(logits, y)
loss = (loss - b).abs() + b # This is it!
optimizer.zero_grad()
loss.backward()
optimizer.step()
有心是用这个方法的读者可能会纠结于 b b b的选择,原论文说 b b b的选择是一个暴力迭代的过程,需要多次尝试
The flood level is chosen from b ∈ { 0 , 0.01 , 0.02 , . . . , 0.50 } b\in \{0, 0.01,0.02,...,0.50\} b∈{0,0.01,0.02,...,0.50}
不过笔者倒是有另外一个脑洞:
b
b
b无非就是决定什么时候开始交替训练罢了,那如果我们从一开始就用不同的学习率进行交替训练呢?也就是自始自终都执行
θ
n
=
θ
n
−
1
−
ε
1
g
(
θ
n
−
1
)
θ
n
+
1
=
θ
n
+
ε
2
g
(
θ
n
)
(4)
\begin{aligned}&\theta_n = \theta_{n-1} - \varepsilon_1 g(\theta_{n-1})\\ &\theta_{n+1} = \theta_n + \varepsilon_2 g(\theta_n) \end{aligned}\tag{4}
θn=θn−1−ε1g(θn−1)θn+1=θn+ε2g(θn)(4)
其中
ε
1
>
ε
2
\varepsilon_1 > \varepsilon_2
ε1>ε2,这样我们就把
b
b
b去掉了(引入了
ε
1
,
ε
2
\varepsilon_1, \varepsilon_2
ε1,ε2的选择,天下没有免费的午餐)。重复上述近似展开,我们就得到
θ
n
+
1
=
θ
n
−
1
−
ε
1
g
(
θ
n
−
1
)
+
ε
2
g
(
θ
n
−
1
−
ε
1
g
(
θ
n
−
1
)
)
≈
θ
n
−
1
−
ε
1
g
(
θ
n
−
1
)
+
ε
2
(
g
(
θ
n
−
1
)
−
ε
1
∇
θ
g
(
θ
n
−
1
)
g
(
θ
n
−
1
)
)
=
θ
n
−
1
−
(
ε
1
−
ε
2
)
g
(
θ
n
−
1
)
−
ε
1
ε
2
2
∇
θ
∥
g
(
θ
n
−
1
)
∥
2
=
θ
n
−
1
−
(
ε
1
−
ε
2
)
∇
θ
[
L
(
θ
n
−
1
)
+
ε
1
ε
2
2
(
ε
1
−
ε
2
)
∥
∇
θ
L
(
θ
n
−
1
)
∥
2
]
(5)
\begin{aligned} \theta_{n+1} =& \, \theta_{n-1} - \varepsilon_1g(\theta_{n-1})+\varepsilon_2g(\theta_{n-1} - \varepsilon_1g(\theta_{n-1}))\\ \approx&\, \theta_{n-1} - \varepsilon_1g(\theta_{n-1}) + \varepsilon_2(g(\theta_{n-1}) - \varepsilon_1\nabla_\theta g(\theta_{n-1})g(\theta_{n-1}))\\ =&\, \theta_{n-1} - (\varepsilon_1 - \varepsilon_2) g(\theta_{n-1}) - \frac{\varepsilon_1\varepsilon_2}{2}\nabla_{\theta}\Vert g(\theta_{n-1})\Vert^2\\ =&\,\theta_{n-1} - (\varepsilon_1 - \varepsilon_2)\nabla_{\theta}\left[\mathcal{L}(\theta_{n-1}) + \frac{\varepsilon_1\varepsilon_2}{2(\varepsilon_1 - \varepsilon_2)}\Vert \nabla_{\theta}\mathcal{L}(\theta_{n-1})\Vert^2\right] \end{aligned}\tag{5}
θn+1=≈==θn−1−ε1g(θn−1)+ε2g(θn−1−ε1g(θn−1))θn−1−ε1g(θn−1)+ε2(g(θn−1)−ε1∇θg(θn−1)g(θn−1))θn−1−(ε1−ε2)g(θn−1)−2ε1ε2∇θ∥g(θn−1)∥2θn−1−(ε1−ε2)∇θ[L(θn−1)+2(ε1−ε2)ε1ε2∥∇θL(θn−1)∥2](5)
这就相当于自始自终都在用学习率
ε
1
−
ε
2
\varepsilon_1-\varepsilon_2
ε1−ε2来优化损失函数
L
(
θ
)
+
ε
1
ε
2
2
(
ε
1
−
ε
2
)
∥
∇
θ
L
(
θ
)
∥
2
\mathcal{L}(\theta) + \frac{\varepsilon_1\varepsilon_2}{2(\varepsilon_1 - \varepsilon_2)}\Vert\nabla_{\theta}\mathcal{L}(\theta)\Vert^2
L(θ)+2(ε1−ε2)ε1ε2∥∇θL(θ)∥2了,也就是说一开始就把梯度惩罚给加了进去,这样能提升模型的泛化性能吗?《Backstitch: Counteracting Finite-sample Bias via Negative Steps》里边指出这种做法在语音识别上是有效的,请读者自行测试甄别
效果检验
我随便在网上找了个竞赛,然后利用别人提供的以BERT为baseline的代码,对Flooding的效果进行了测试,下图分别是没有做Flooding和参数 b = 0.7 b=0.7 b=0.7的Flooding损失值变化图,值得一提的是,没有做Flooding的验证集最低损失值为0.814198,而做了Flooding的验证集最低损失值为0.809810

根据知乎文章一行代码发一篇ICML?底下用户Curry评论所言:“通常来说 b b b值需要设置成比’Validation Error开始上升’的值更小,1/2处甚至更小,结果更优”,所以我仔细观察了下没有加Flooding模型损失值变化图,大概在loss为0.75到1.0左右的时候开始出现过拟合现象,因此我又分别设置了 b = 0.4 b=0.4 b=0.4和 b = 0.5 b=0.5 b=0.5,做了两次Flooding实验,结果如下图

值得一提的是, b = 0.4 b=0.4 b=0.4和 b = 0.5 b=0.5 b=0.5时,验证集上的损失值最低仅为0.809958和0.796819,而且很明显验证集损失的整体上升趋势更加缓慢。接下来我做了一个实验,主要是验证"继续脑洞"部分以不同的学习率一开始就交替着做梯度下降和梯度上升的效果,其中,梯度下降的学习率我设为 1 e − 5 1e-5 1e−5,梯度上升的学习率为 1 e − 6 1e-6 1e−6,结果如下图,验证集的损失最低仅有0.783370

References
- 我们真的需要把训练集的损失降低到零吗?
- 一行代码发一篇ICML?