目录
一. 如何使用一颗红黑树同时实现map和set
二. 红黑树的节点插入操作
三. 红黑树迭代器的实现
3.1 begin()和end()
3.2 operator++和operator--
3.3 红黑树迭代器实现完整版代码
四. map和set的封装
附录:用红黑树封装map和set完整版代码
1. RBTree.h文件
2. map.h文件
3. set.h文件
一. 如何使用一颗红黑树同时实现map和set
我们知道,map和set的底层都是通过红黑树来实现的,它们的不同在于:map存储的是一键值对,键值对的第一个数据用于搜索树的比较,第二个数据用于与之配对,而set则只有一个数据。需要采用模板(泛型编程)的方法来定义红黑树节点,并在map和set中给定红黑树类模板不同的模板参数类型,
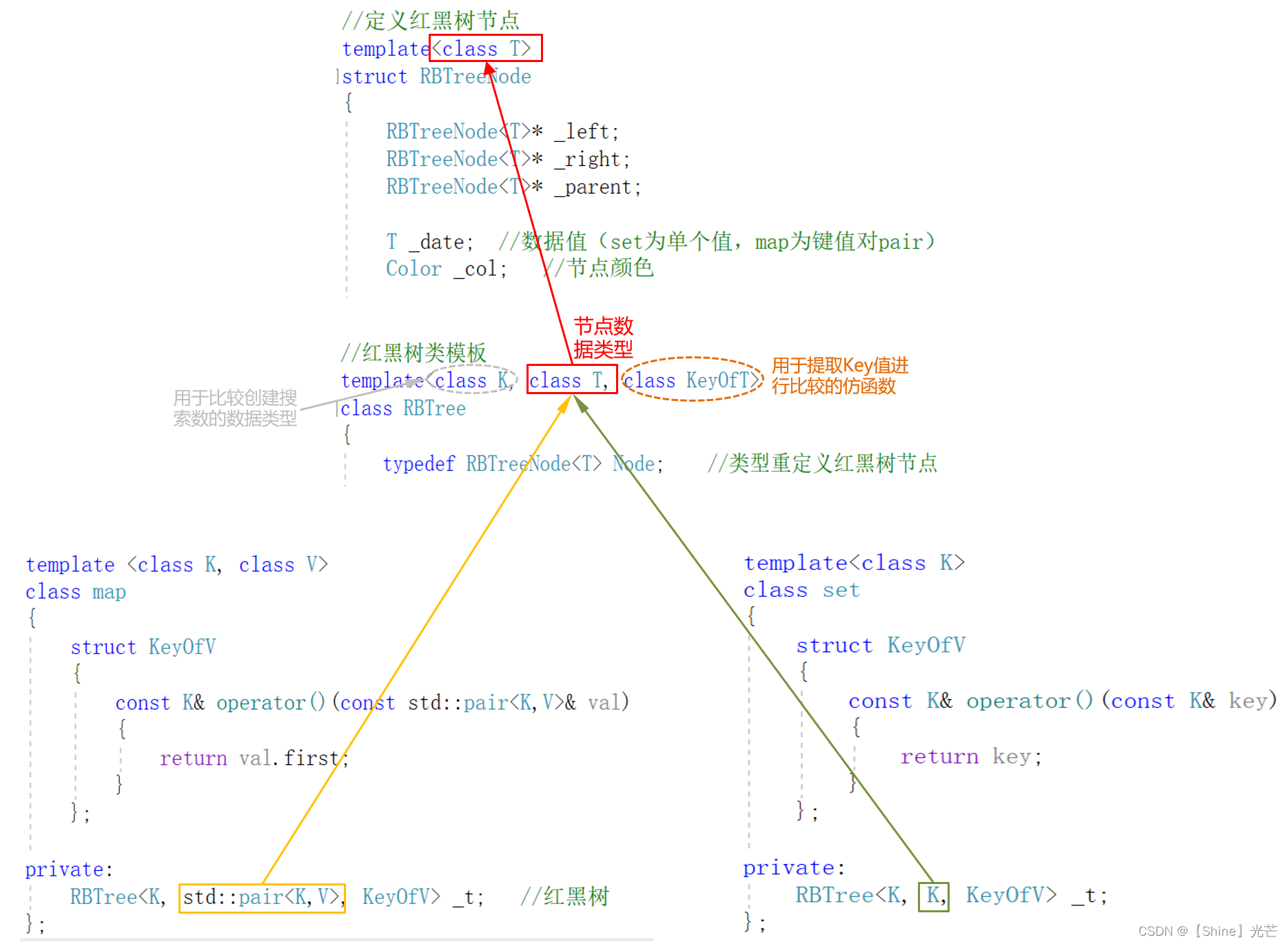
观察图1.1,我们可以总结出RBTreeNode、RBTree、map和set类模板之间的如下规则:
- 红黑树节点只有一个模板参数,set有一个模板参数,其本身就是节点的数据类型,map有两个模板参数,分别为创建键值对的first和second数据类型。
- 在map中,RBTreeNode中的模板参数类型为pair键值对,由于map中要取出键值对的first比较创建搜索树,而直接用>或<对pair比较不符合要求,因此定义仿函数KeyOfV来获取用于比较的数据。
二. 红黑树的节点插入操作
用于对map和set封装的红黑树的查找操作与普通红黑树一致,唯一的不同在于需要创建KeyOfV类的对象,并使用仿函数进行比较。如果希望与库中的insert更加贴合,则应返还键值对pair<iterator, bool>类型数据。
具体的红黑树的插入实现流程,可参考博文:C++数据结构:手撕红黑树_【Shine】光芒的博客-CSDN博客
代码2.1:(红黑树节点插入)
std::pair<iterator, bool> insert(const T& date)
{
//插入第一个节点
if (_root == nullptr)
{
_root = new Node(date);
_root->_col = BLACK; //根节点为黑色
return std::make_pair(_root, true);
}
KeyOfT kov; //用于筛选比较数据的类对象
//寻找节点插入的位置
Node* parent = nullptr;
Node* cur = _root;
while (cur)
{
//如果cur节点的key值大于插入键值对的key,向左子树查找
if (kov(cur->_date) > kov(date))
{
parent = cur;
cur = cur->_left;
}
else if(kov(cur->_date) < kov(date)) //如果cur节点的key值小于插入键值对的key,向左子树查找
{
parent = cur;
cur = cur->_right;
}
else //相等表明节点已存在,插入失败
{
return std::make_pair(cur, false);
}
}
//判断新节点是parent的左节点还是右节点,链接
//默认新插入的节点为红色
cur = new Node(date);
Node* newNode = cur;
cur->_col = RED;
cur->_parent = parent;
if (kov(parent->_date) > kov(date))
{
parent->_left = cur;
}
else
{
parent->_right = cur;
}
//如果parent节点不为空且为红色,那么红黑树的结构在插入节点后被破坏,需要调整
while (parent && parent->_col == RED)
{
Node* grandParent = parent->_parent; //祖父节点
assert(grandParent);
assert(grandParent->_col == BLACK); //断言检查,如果祖父节点为空或为黑色,那么红黑树结构在节点插入之前就存在问题
if (parent == grandParent->_left) //插入在祖父节点的左子树
{
Node* uncle = grandParent->_right;
//情况一:cur为红,parent为红,grandFather为黑,uncle为红
if (uncle && uncle->_col == RED)
{
//将parent节点和uncle节点变为黑,grandFather节点变为红,然后继续向上调整
parent->_col = BLACK;
uncle->_col = BLACK;
grandParent->_col = RED;
cur = grandParent;
parent = cur->_parent;
}
else //情况二、三:cur为红,parent为红,grandFather为黑,uncle不存在或为黑
{
if (parent->_left == cur)
{
//情况二 -- 进行右单旋 + 变色(parent变黑,grandFather变红)
// g
// p u
//c
RotateR(grandParent);
parent->_col = BLACK;
grandParent->_col = RED;
}
else
{
//情况三 -- 进行左右双旋 + 变色(cur节点变为黑,grandFater节点变为红)
// g
// p u
// u
RotateLR(grandParent);
cur->_col = BLACK;
grandParent->_col = RED;
}
break;
}
}
else //parent == grandParent->_right
{
Node* uncle = grandParent->_left; //叔叔节点
//情况一:cur为红,parent为红,grandFather为黑,uncle为红
if (uncle && uncle->_col == RED)
{
//将parent节点和uncle节点变为黑,grandFather节点变为红,然后继续向上调整
parent->_col = BLACK;
uncle->_col = BLACK;
grandParent->_col = RED;
cur = grandParent;
parent = cur->_parent;
}
else
{
//情况二、三:cur为红,parent为红,grandFather为黑,uncle不存在或为黑
if (parent->_right == cur)
{
//情况二 -- 进行右单旋 + 变色(parent变黑,grandFather变红)
// g
// u p
// c
RotateL(grandParent);
parent->_col = BLACK;
grandParent->_col = RED;
}
else
{
//情况三 -- 进行右左双旋 + 变色(cur节点变为黑,grandFater节点变为红)
// g
// u p
// c
RotateRL(grandParent);
cur->_col = BLACK;
grandParent->_col = RED;
}
break;
}
}
}
_root->_col = BLACK; //根节点为黑色
return std::make_pair(newNode, true);
}三. 红黑树迭代器的实现
我们要额外封装一个类struct __RBTree_iterator_来实现红黑树迭代器,这个类有三个模板参数T、Ref、Ptr,这样做的目的是定义一份迭代器类模板就可以实现普通迭代器和const迭代器。
- typedef __RBTree_iterator_<T, T&, T*> iterator; //红黑树迭代器
3.1 begin()和end()
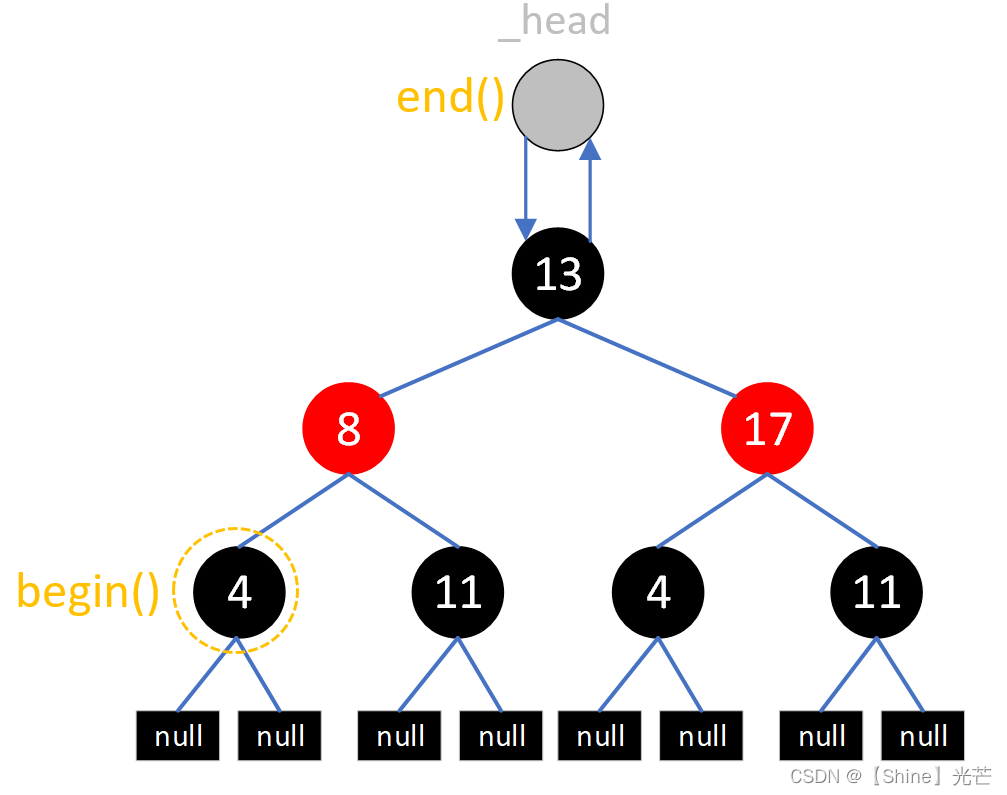
STL标准规定迭代器区间begin()和end()为左闭右开区间,而对红黑树遍历获取的数据为升序序列,因此,begin()应该为左下角位置处的节点,end()应该为哨兵卫的头结点_head。这里从便于理解和实现的角度出发,将_head设为nullptr,即:end()返回空指针。
代码3.1:(begin和end)
//获取begin()位置 -- 最左侧节点
iterator begin()
{
Node* left = _root;
while (left && left->_left)
{
left = left->_left;
}
return iterator(left);
}
iterator end()
{
return iterator(nullptr);
}3.2 operator++和operator--
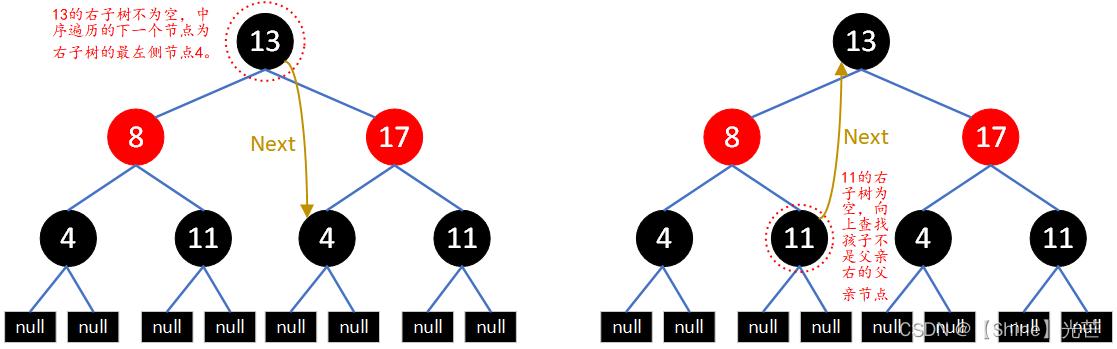
operator++就是查找中序遍历的下一个节点,可分为两种情况讨论:
- 如果节点的右子树不为空,则为右子树最左侧的节点。
- 如果节点的右子树为空,则向上查找孩子不是父亲的右子节点的那个节点。
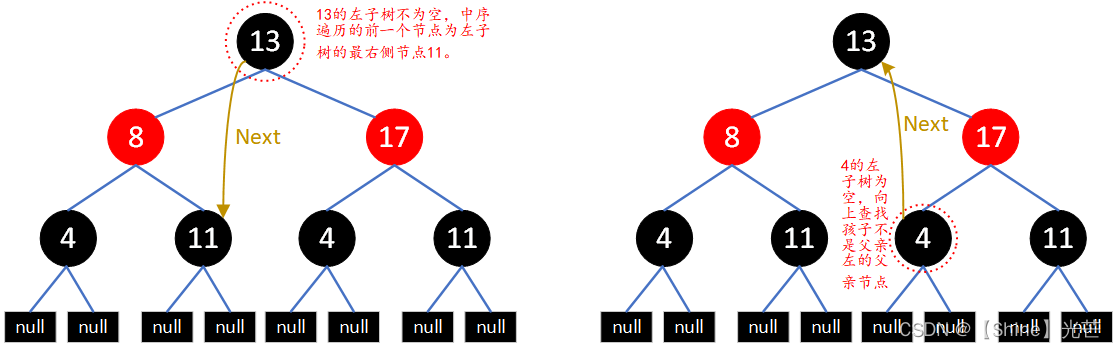
operator--与operator++正好相反,为找中序遍历的前一个节点,亦可分两种情况讨论:
- 如果节点的左子树不为空,则为左子树最右侧的节点。
- 如果节点的左子树为空,则向上查找孩子不是父亲的左子节点的那个节点。
代码3.2:(operator++和operator--)
typedef RBTreeNode<T> Node; //红黑树节点
typedef __RBTree_iterator_<T, Ref, Ptr> Self;
//++运算符重载函数
Self& operator++()
{
if (_node->_right != nullptr)
{
//找右子树的最左侧节点
Node* left = _node->_right;
while (left->_left)
{
left = left->_left;
}
_node = left;
}
else
{
//找孩子节点为左孩子节点的位置,或者父亲节点为空
Node* parent = _node->_parent;
Node* cur = _node;
while (parent && parent->_right == cur)
{
cur = cur->_parent;
parent = parent->_parent;
}
_node = parent;
}
return *this;
}
//--运算符重载函数
Self& operator--()
{
if (_node->_left != nullptr)
{
Node* right = _node->_left;
while (right->_right)
{
right = right->_right;
}
_node = right;
}
else
{
Node* parent = _node->_parent;
Node* cur = _node;
while (parent && parent->_left == cur)
{
cur = cur->_parent;
parent = parent->_parent;
}
_node = parent;
}
return *this;
}3.3 红黑树迭代器实现完整版代码
//红黑树迭代器模板
template<class T, class Ref, class Ptr>
struct __RBTree_iterator_
{
typedef RBTreeNode<T> Node; //红黑树节点
typedef __RBTree_iterator_<T, Ref, Ptr> Self;
Node* _node;
//构造函数
__RBTree_iterator_(Node* node)
: _node(node)
{ }
//解引用函数
Ref operator*()
{
return _node->_date;
}
//成员访问操作符->重载
Ptr operator->()
{
return &_node->_date;
}
bool operator==(const Self& it) const
{
return _node == it._node;
}
bool operator!=(const Self& it) const
{
return _node != it._node;
}
//++运算符重载函数
Self& operator++()
{
if (_node->_right != nullptr)
{
//找右子树的最左侧节点
Node* left = _node->_right;
while (left->_left)
{
left = left->_left;
}
_node = left;
}
else
{
//找孩子节点为左孩子节点的位置,或者父亲节点为空
Node* parent = _node->_parent;
Node* cur = _node;
while (parent && parent->_right == cur)
{
cur = cur->_parent;
parent = parent->_parent;
}
_node = parent;
}
return *this;
}
//--运算符重载函数
Self& operator--()
{
if (_node->_left != nullptr)
{
Node* right = _node->_left;
while (right->_right)
{
right = right->_right;
}
_node = right;
}
else
{
Node* parent = _node->_parent;
Node* cur = _node;
while (parent && parent->_left == cur)
{
cur = cur->_parent;
parent = parent->_parent;
}
_node = parent;
}
return *this;
}
};四. map和set的封装
map和set底层都是通过红黑树来实现的,只需在map和set中定义一颗红黑树的自定义类型变量,然后调用红黑树的接口函数即可。
这里需要特别注意的是map中的operator[]函数,其实现为先调用insert函数,insert函数返回一个键值对,first为插入的节点或Key与插入节点相等位置的迭代器,second为bool类型变量,用来表示是否有新节点成功插入。函数只需返回insert返回的键值对的second的引用即可。
注意用于提取Key的仿函数要在map和set中分别定义。
代码4.1:(map的封装)
namespace zhang
{
template <class K, class V>
class map
{
struct KeyOfV
{
const K& operator()(const std::pair<K,V>& val)
{
return val.first;
}
};
public:
typedef typename RBTree<K, std::pair<K, V>, KeyOfV>::iterator iterator;
std::pair<iterator, bool> insert(const std::pair<K, V>& kv)
{
return _t.insert(kv);
}
iterator begin()
{
return _t.begin();
}
iterator end()
{
return _t.end();
}
V& operator[](const K& key)
{
std::pair<iterator, bool> ret = insert(std::make_pair(key, V()));
return ret.first->second;
}
private:
RBTree<K, std::pair<K,V>, KeyOfV> _t; //红黑树
};
}代码4.2:(set的模拟实现)
namespace zhang
{
template <class K>
class set
{
struct KeyOfV
{
const K& operator()(const K& val)
{
return val;
}
};
public:
typedef typename RBTree<K, K, KeyOfV>::iterator iterator;
std::pair<iterator, bool> insert(const K& key)
{
return _t.insert(key);
}
iterator begin()
{
return _t.begin();
}
iterator end()
{
return _t.end();
}
K& operator[](const K& key)
{
std::pair<iterator, bool> ret = insert(key);
return *ret.first;
}
private:
RBTree<K, K, KeyOfV> _t; //红黑树
};
}
附录:用红黑树封装map和set完整版代码
1. RBTree.h文件
#include<iostream>
#include<assert.h>
//枚举常量 -- 红色、黑色
enum Color
{
RED,
BLACK
};
//定义红黑树节点
template<class T>
struct RBTreeNode
{
RBTreeNode<T>* _left;
RBTreeNode<T>* _right;
RBTreeNode<T>* _parent;
T _date; //数据值(set为单个值,map为键值对pair)
Color _col; //节点颜色
RBTreeNode(const T& date) //节点构造函数
: _left(nullptr)
, _right(nullptr)
, _parent(nullptr)
, _date(date)
, _col(RED)
{ }
};
//红黑树迭代器模板
template<class T, class Ref, class Ptr>
struct __RBTree_iterator_
{
typedef RBTreeNode<T> Node; //红黑树节点
typedef __RBTree_iterator_<T, Ref, Ptr> Self;
Node* _node;
//构造函数
__RBTree_iterator_(Node* node)
: _node(node)
{ }
//解引用函数
Ref operator*()
{
return _node->_date;
}
//成员访问操作符->重载
Ptr operator->()
{
return &_node->_date;
}
bool operator==(const Self& it) const
{
return _node == it._node;
}
bool operator!=(const Self& it) const
{
return _node != it._node;
}
//++运算符重载函数
Self& operator++()
{
if (_node->_right != nullptr)
{
//找右子树的最左侧节点
Node* left = _node->_right;
while (left->_left)
{
left = left->_left;
}
_node = left;
}
else
{
//找孩子节点为左孩子节点的位置,或者父亲节点为空
Node* parent = _node->_parent;
Node* cur = _node;
while (parent && parent->_right == cur)
{
cur = cur->_parent;
parent = parent->_parent;
}
_node = parent;
}
return *this;
}
//--运算符重载函数
Self& operator--()
{
if (_node->_left != nullptr)
{
Node* right = _node->_left;
while (right->_right)
{
right = right->_right;
}
_node = right;
}
else
{
Node* parent = _node->_parent;
Node* cur = _node;
while (parent && parent->_left == cur)
{
cur = cur->_parent;
parent = parent->_parent;
}
_node = parent;
}
return *this;
}
};
//红黑树类模板
template<class K, class T, class KeyOfT>
class RBTree
{
typedef RBTreeNode<T> Node; //类型重定义红黑树节点
public:
typedef __RBTree_iterator_<T, T&, T*> iterator; //迭代器
std::pair<iterator, bool> insert(const T& date)
{
//插入第一个节点
if (_root == nullptr)
{
_root = new Node(date);
_root->_col = BLACK; //根节点为黑色
return std::make_pair(_root, true);
}
KeyOfT kov; //用于筛选比较数据的类对象
//寻找节点插入的位置
Node* parent = nullptr;
Node* cur = _root;
while (cur)
{
//如果cur节点的key值大于插入键值对的key,向左子树查找
if (kov(cur->_date) > kov(date))
{
parent = cur;
cur = cur->_left;
}
else if(kov(cur->_date) < kov(date)) //如果cur节点的key值小于插入键值对的key,向左子树查找
{
parent = cur;
cur = cur->_right;
}
else //相等表明节点已存在,插入失败
{
return std::make_pair(cur, false);
}
}
//判断新节点是parent的左节点还是右节点,链接
//默认新插入的节点为红色
cur = new Node(date);
Node* newNode = cur;
cur->_col = RED;
cur->_parent = parent;
if (kov(parent->_date) > kov(date))
{
parent->_left = cur;
}
else
{
parent->_right = cur;
}
//如果parent节点不为空且为红色,那么红黑树的结构在插入节点后被破坏,需要调整
while (parent && parent->_col == RED)
{
Node* grandParent = parent->_parent; //祖父节点
assert(grandParent);
assert(grandParent->_col == BLACK); //断言检查,如果祖父节点为空或为黑色,那么红黑树结构在节点插入之前就存在问题
if (parent == grandParent->_left) //插入在祖父节点的左子树
{
Node* uncle = grandParent->_right;
//情况一:cur为红,parent为红,grandFather为黑,uncle为红
if (uncle && uncle->_col == RED)
{
//将parent节点和uncle节点变为黑,grandFather节点变为红,然后继续向上调整
parent->_col = BLACK;
uncle->_col = BLACK;
grandParent->_col = RED;
cur = grandParent;
parent = cur->_parent;
}
else //情况二、三:cur为红,parent为红,grandFather为黑,uncle不存在或为黑
{
if (parent->_left == cur)
{
//情况二 -- 进行右单旋 + 变色(parent变黑,grandFather变红)
// g
// p u
//c
RotateR(grandParent);
parent->_col = BLACK;
grandParent->_col = RED;
}
else
{
//情况三 -- 进行左右双旋 + 变色(cur节点变为黑,grandFater节点变为红)
// g
// p u
// u
RotateLR(grandParent);
cur->_col = BLACK;
grandParent->_col = RED;
}
break;
}
}
else //parent == grandParent->_right
{
Node* uncle = grandParent->_left; //叔叔节点
//情况一:cur为红,parent为红,grandFather为黑,uncle为红
if (uncle && uncle->_col == RED)
{
//将parent节点和uncle节点变为黑,grandFather节点变为红,然后继续向上调整
parent->_col = BLACK;
uncle->_col = BLACK;
grandParent->_col = RED;
cur = grandParent;
parent = cur->_parent;
}
else
{
//情况二、三:cur为红,parent为红,grandFather为黑,uncle不存在或为黑
if (parent->_right == cur)
{
//情况二 -- 进行右单旋 + 变色(parent变黑,grandFather变红)
// g
// u p
// c
RotateL(grandParent);
parent->_col = BLACK;
grandParent->_col = RED;
}
else
{
//情况三 -- 进行右左双旋 + 变色(cur节点变为黑,grandFater节点变为红)
// g
// u p
// c
RotateRL(grandParent);
cur->_col = BLACK;
grandParent->_col = RED;
}
break;
}
}
}
_root->_col = BLACK; //根节点为黑色
return std::make_pair(newNode, true);
}
//中序遍历函数
void InOrder()
{
_InOrder(_root);
std::cout << std::endl;
}
//红黑树检验函数
bool IsRBTree()
{
//空树是合法的红黑树
if (_root == nullptr)
{
return true;
}
//检查根节点颜色
if (_root->_col == RED)
{
std::cout << "根节点颜色不是黑色" << std::endl;
}
int baseBlackNum = 0; //基准黑色节点个数
//以最左侧路径为基准,计算黑色节点个数,每条路径黑色节点数目都应该相同
Node* cur = _root;
while (cur)
{
if (cur->_col == BLACK)
{
++baseBlackNum;
}
cur = cur->_left;
}
bool blackNumTrue = PrevCheck(_root, 0, baseBlackNum); //检查每条路径黑色节点数目是否相同
bool colorTrue = CheckColor(_root); //检查是否存在连续红色节点
return blackNumTrue && colorTrue;
}
//获取begin()位置 -- 最左侧节点
iterator begin()
{
Node* left = _root;
while (left && left->_left)
{
left = left->_left;
}
return iterator(left);
}
iterator end()
{
return iterator(nullptr);
}
private:
bool CheckColor(Node* root)
{
if (root == nullptr)
{
return true;
}
//如果本节点为红色且父亲节点也为红色,证明存在连续红色节点,结构错误
if (root->_col == RED && root->_parent && root->_parent->_col == RED)
{
std::cout << "存在连续的红色节点" << std::endl;
return false;
}
return CheckColor(root->_left) && CheckColor(root->_right);
}
bool PrevCheck(Node* root, int blackNum, int baseBlackNum)
{
if (root == nullptr)
{
if (blackNum != baseBlackNum)
{
std::cout << "每条路径上黑色节点的数目不同" << std::endl;
return false;
}
else
{
return true;
}
}
if (root->_col == BLACK)
{
++blackNum;
}
return PrevCheck(root->_left, blackNum, baseBlackNum)
&& PrevCheck(root->_right, blackNum, baseBlackNum);
}
void _InOrder(Node* root)
{
if (root == nullptr)
{
return;
}
_InOrder(root->_left);
std::cout << root->_kv.first << " ";
_InOrder(root->_right);
}
void RotateR(Node* parent) //右单旋函数
{
Node* pNode = parent->_parent;
Node* pL = parent->_left; //左子节点
Node* pLR = pL->_right; //左子节点的右子节点
//将pLR节点托管给parent节点的左子节点
parent->_left = pLR;
if (pLR != nullptr)
{
pLR->_parent = parent;
}
//将父亲节点托管给pL节点的右子节点
pL->_right = parent;
parent->_parent = pL;
//此时这颗进行旋转的子树的根节点变为了pL,pL要与pNode节点连接
if (parent == _root)
{
_root = pL;
pL->_parent = nullptr;
}
else
{
pL->_parent = pNode;
if (pNode->_left == parent)
{
pNode->_left = pL;
}
else
{
pNode->_right = pL;
}
}
}
void RotateL(Node* parent) //左单旋函数
{
Node* pNode = parent->_parent;
Node* pR = parent->_right; //右子节点
Node* pRL = pR->_left; //右子节点的左子节点
//将pLR节点托管给parent节点的右子节点
parent->_right = pRL;
if (pRL != nullptr)
{
pRL->_parent = parent;
}
//将parent节点托管给pR的左子节点
pR->_left = parent;
parent->_parent = pR;
if (_root == parent)
{
_root = pR;
_root->_parent = nullptr;
}
else
{
pR->_parent = pNode;
if (pNode->_left == parent)
{
pNode->_left = pR;
}
else
{
pNode->_right = pR;
}
}
}
void RotateLR(Node* parent) //左右双旋函数
{
RotateL(parent->_left);
RotateR(parent);
}
void RotateRL(Node* parent) //右左双旋函数
{
RotateR(parent->_right);
RotateL(parent);
}
private:
Node* _root = nullptr;
};2. map.h文件
#include "RBTree.h"
namespace zhang
{
template <class K, class V>
class map
{
struct KeyOfV
{
const K& operator()(const std::pair<K,V>& val)
{
return val.first;
}
};
public:
typedef typename RBTree<K, std::pair<K, V>, KeyOfV>::iterator iterator;
std::pair<iterator, bool> insert(const std::pair<K, V>& kv)
{
return _t.insert(kv);
}
iterator begin()
{
return _t.begin();
}
iterator end()
{
return _t.end();
}
V& operator[](const K& key)
{
std::pair<iterator, bool> ret = insert(std::make_pair(key, V()));
return ret.first->second;
}
private:
RBTree<K, std::pair<K,V>, KeyOfV> _t; //红黑树
};
}3. set.h文件
namespace zhang
{
template <class K>
class set
{
struct KeyOfV
{
const K& operator()(const K& val)
{
return val;
}
};
public:
typedef typename RBTree<K, K, KeyOfV>::iterator iterator;
std::pair<iterator, bool> insert(const K& key)
{
return _t.insert(key);
}
iterator begin()
{
return _t.begin();
}
iterator end()
{
return _t.end();
}
K& operator[](const K& key)
{
std::pair<iterator, bool> ret = insert(key);
return *ret.first;
}
private:
RBTree<K, K, KeyOfV> _t; //红黑树
};
}