✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab仿真内容点击👇
智能优化算法 神经网络预测 雷达通信 无线传感器
信号处理 图像处理 路径规划 元胞自动机 无人机 电力系统
⛄ 内容介绍
随着无线传感器网络(Wireless Sensor Network,WSN)技术的不断发展,越来越多的WSN技术已经应用到了智能家居,智慧交通等领域.WSN属于一种重要的ad hoc网络,它由很多具有感知和数据处理能力的传感节点以自组织或多跳的方式搭建.目前,WSN的研究工作主要集中在网络技术和通信协议方面,关于传感器网络部署优化的研究还很少.在空旷的农场或森林部署WSN,一般做法是通过飞机进行高空随机抛撒.但是,这种方法可能出现大量的多余节点和覆盖漏洞.因此,如何用尽量少的传感节点感知最大的区域是WSN部署优化中一个亟待研究的问题.在广阔的农场环境或森林中,需要准备许多传感节点,节点大部分靠电池供电,但是,电池能量是有限的,并且无法更换.因此,如何使用相同数量的节点,达到最长的网络寿命成为WSN部署优化中另一个倍受瞩目的问题.
⛄ 部分代码
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%
% Multi-objective Sensor Selection Optimization based on
% Lichtenberg Algorithm (MOSSOLA)
%
% AUTHORS: Jo茫o Luiz Junho Pereira and Guilherme Ferreira Gomes
%
% A Hybrid PHYSICS-based Multi-objective Metaheuristic with
% Feature Selection for Sensor Placement Optimization (SPO)
%
% Please cite this algorithm as:
%
% Pereira, J.L.J., Francisco, M.B., Souza Chaves, J. A., Sebasti茫o Sim玫es Cunha Jr & Gomes, G. F.
% Multi-objective sensor placement optimization of helicopter rotor blade based on feature selection.
% Mechanical Systems and Signal Processing. 2022.
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
close all
clear all
clc
format long
warning off
set(0,'DefaultAxesFontName', 'Times New Roman')
set(0,'DefaultAxesFontSize', 12)
set(0,'DefaultTextFontname', 'Times New Roman')
set(0,'DefaultTextFontSize', 12)
opengl('save', 'software')
% Importing natural frequencies in FEM structure (Main Rotor Blade - MRB)
F=importdata('natural_frequencies.txt');
wn1=F.data(1:9,2); wn = [wn1(1) wn1(2) wn1(3) wn1(4) wn1(6) wn1(9)];
% Importing All sensor candidates from FEM structure (34 well spaced nodes
% in MRB)
S=importdata('Sensors.txt');
% Importing mode shapes in FEM structure (MRB)
M1=importdata('Mode1.txt'); M1x=M1.data(:,5); M1y=M1.data(:,6);M1z=M1.data(:,7);
M2=importdata('Mode2.txt'); M2x=M2.data(:,5); M2y=M2.data(:,6);M2z=M2.data(:,7);
M3=importdata('Mode3.txt'); M3x=M3.data(:,5); M3y=M3.data(:,6);M3z=M3.data(:,7);
M4=importdata('Mode4.txt'); M4x=M4.data(:,5); M4y=M4.data(:,6);M4z=M4.data(:,7);
M6=importdata('Mode6.txt'); M6x=M6.data(:,5); M6y=M6.data(:,6);M6z=M6.data(:,7);
M9=importdata('Mode9.txt'); M9x=M9.data(:,5); M9y=M9.data(:,6);M9z=M9.data(:,7);
% Calculating Total displacements (triaxial)
M1T = sqrt(M1x.^2+M1y.^2+M1z.^2); M2T = sqrt(M2x.^2+M2y.^2+M2z.^2); M3T = sqrt(M3x.^2+M3y.^2+M3z.^2);
M4T = sqrt(M4x.^2+M4y.^2+M4z.^2); M6T = sqrt(M6x.^2+M6y.^2+M6z.^2); M9T = sqrt(M9x.^2+M9y.^2+M9z.^2);
Modos = [M1T M2T M3T M4T M6T M9T];
% Optimizator Parameters
UB = ones(1,length(S)); % Uper bounds
LB = 0*UB; % lower bounds
pop = 100; % Population
n_iter = 100; % Max number os iterations/gerations
ref = 0.4; % if more than zero, a second LF is created with refinement % the size of the other
Np = 100000; % Number of Particles (If 3D, better more than 10000)
S_c = 1; % Stick Probability: Percentage of particles that can don麓t stuck in the
% cluster. Between 0 and 1. Near 0 there are more aggregate, the density of
% cluster is bigger and difusity is low. Near 1 is the opposite.
Rc = 150; % Creation Radius (if 3D, better be less than 80, untill 150)
M = 0; % If M = 0, no lichtenberg figure is created (it is loaded a optimized figure); if 1, a single is created and used in all iterations; If 2, one is created for each iteration.(creating an LF figure takes about 2 min)
d = length(UB); % problem dimension
ngrid = 30; % Number of grids in each dimension
Nr = 100; % Maximum number of solutions in PF
% Sensor Placement Optimization Parameters
C = 1; % METRIC USED (KE=1;EfI=2,ADPR=3;EVP=4;IE=5;FIM=6;MAC=7)
NS = 6; % Sensor Congiguration solution with NS sensors (select from PARETO FRONT after optimization with all sensors numbers)
[x,fval] = LA_optimization(@(x)objectives(x,Modos,S,wn,C),d,pop,LB,UB,ref,n_iter,Np,Rc,S_c,M,ngrid,Nr,@constraint);
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%PARETO FRONT FIGURE%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% figure
% plot(fval(:,1),fval(:,2),'ZDataSource','',...
% 'MarkerFaceColor',[0 0 1],...
% 'MarkerEdgeColor',[0 0 0],...
% 'MarkerSize',4,...
% 'Marker','o',...
% 'LineWidth',0.1,...
% 'LineStyle','none',...
% 'Color',[0 0 0]);
% hold on
% box on
% %plot(fval(best_pos,1),fval(best_pos,2),'MarkerFaceColor',[1 1 0],'MarkerSize',14,'Marker','pentagram','LineWidth', 0.2, 'LineStyle','none','Color',[0 0 0]);
% %legend('PF','TOPSIS');
% % set(0,'DefaultAxesFontSize', 10)
% % set(0,'DefaultTextFontSize', 10)
% set(findall(gcf,'-property','FontName'),'FontName','Italic')
% set(findall(gcf,'-property','FontAngle'),'FontAngle','italic')
% set(gcf,'position',[200,200,350,200])
% %title('Non-dominated solutions','fontweight','bold');
% % axis([0 -0.01 0 30])
% xlabel('J=max(diag(MAC))')
% ylabel('Number of Sensors')
%%%%%%%%%%%%%%%%%%%%%%%%%%%TO CALCULATE HYPERVOLUME%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Simulation = 0;
% for i =1:10
% Simulation = Simulation + 1
% [x,fval] = LA_optimization(@(x)objectives(x,Modos,S,wn,C),d,pop,LB,UB,ref,n_iter,Np,Rc,S_c,M,ngrid,Nr,@constraint);
% HV_Score(i) = HV(fval,length(S))
% end
%
% mean(HV_Score)
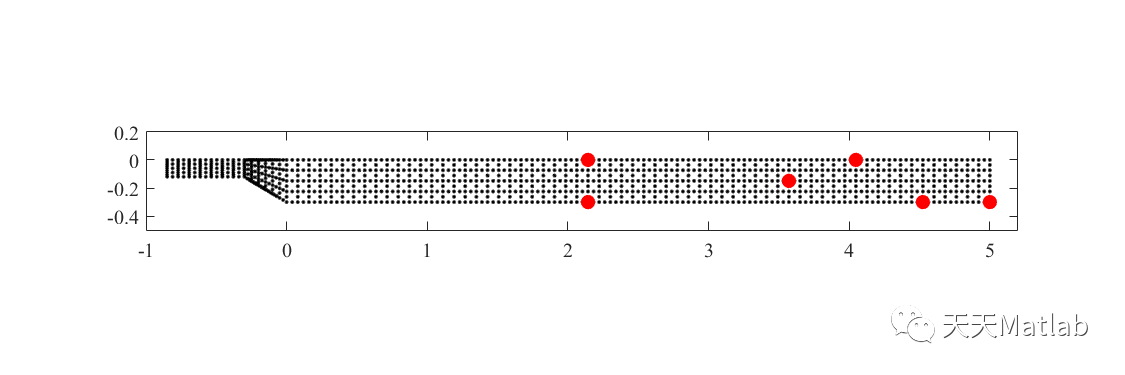
%%%%%%%%%%%%%%%%%%%%%%%%TO PLOT THE SELECTED SENSORS IN STRUCTURE%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
x = round(x);
for i = 1 : length(x)
P(i) = sum(x(i,:));
end
best_pos=find(P==NS);
Xbest = round(x(best_pos,:));
for i=1:length(S)
SLCT(i) = S(i)*Xbest(1,i);
end
SLCT(find(SLCT==0))=[];
FITNESS = fval(best_pos,:);
NUMBERofSENSORS = FITNESS(1,2)
METRICfitness = FITNESS(1,1)
SENSORS = SLCT
ALLNODES = importdata('NODES.txt'); %ALL NODES IN FEM STRUCTURE (TO PLOT STRUCTURAL FIGURE)
NODES = [ALLNODES(:,2) ALLNODES(:,3)];
theta = -90; % to structure figure rotate in 90掳 counterclockwise
R = [cosd(theta) -sind(theta); sind(theta) cosd(theta)];
C = (R*NODES')';
%Sensor Points
for i = 1 : length(SENSORS)
PS(i,:) = [C(SENSORS(i),1) C(SENSORS(i),2)];
end
%Plot
figure
plot(C(:,1),C(:,2),'.k')
hold on
plot(PS(:,1),PS(:,2),'ZDataSource','',...
'MarkerFaceColor',[1 0 0],...
'MarkerEdgeColor',[1 0 0],...
'MarkerSize',8,...
'Marker','o',...
'LineWidth',0.1,...
'LineStyle','none',...
'Color',[1 0 0]);
axis equal
axis([-1 5.2 -0.5 0.2])
set(gcf,'position',[200,200,900,300])
⛄ 运行结果
⛄ 参考文献
[1]伊廷华, 李宏男, 顾明,等. 基于MATLAB平台的传感器优化布置工具箱的开发及应用[J]. 土木工程学报, 2010(12):7.
[2]郎健. 无线传感器网络部署优化研究与仿真[D]. 北京工业大学.
⛄ Matlab代码关注
❤️部分理论引用网络文献,若有侵权联系博主删除
❤️ 关注我领取海量matlab电子书和数学建模资料
【WSN布局】基于LICHTENBERG算的多目标传感器选择和放置优化问题研究附matlab代码
news2026/3/17 17:27:00
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/51409.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章

如何改变胆小怕事的性格?
胆小怕事 就是指一个人做事总是十分胆怯,畏畏缩缩,举手投足也不够大气,经常要看别人的脸色,害怕麻烦上身,对强势的人也会显得唯唯诺诺,战战兢兢。胆小怕事 是某种心理问题的表现,或者说性格缺陷…

基于Q-learning方法的地铁列车时刻表重新调度
文章信息《Metro Train Timetable Rescheduling Based on Q-learning Approach》是发表在2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC)上的一篇文章。摘要在地铁系统中,不可预测的干扰会影响正常运行,给乘客带…
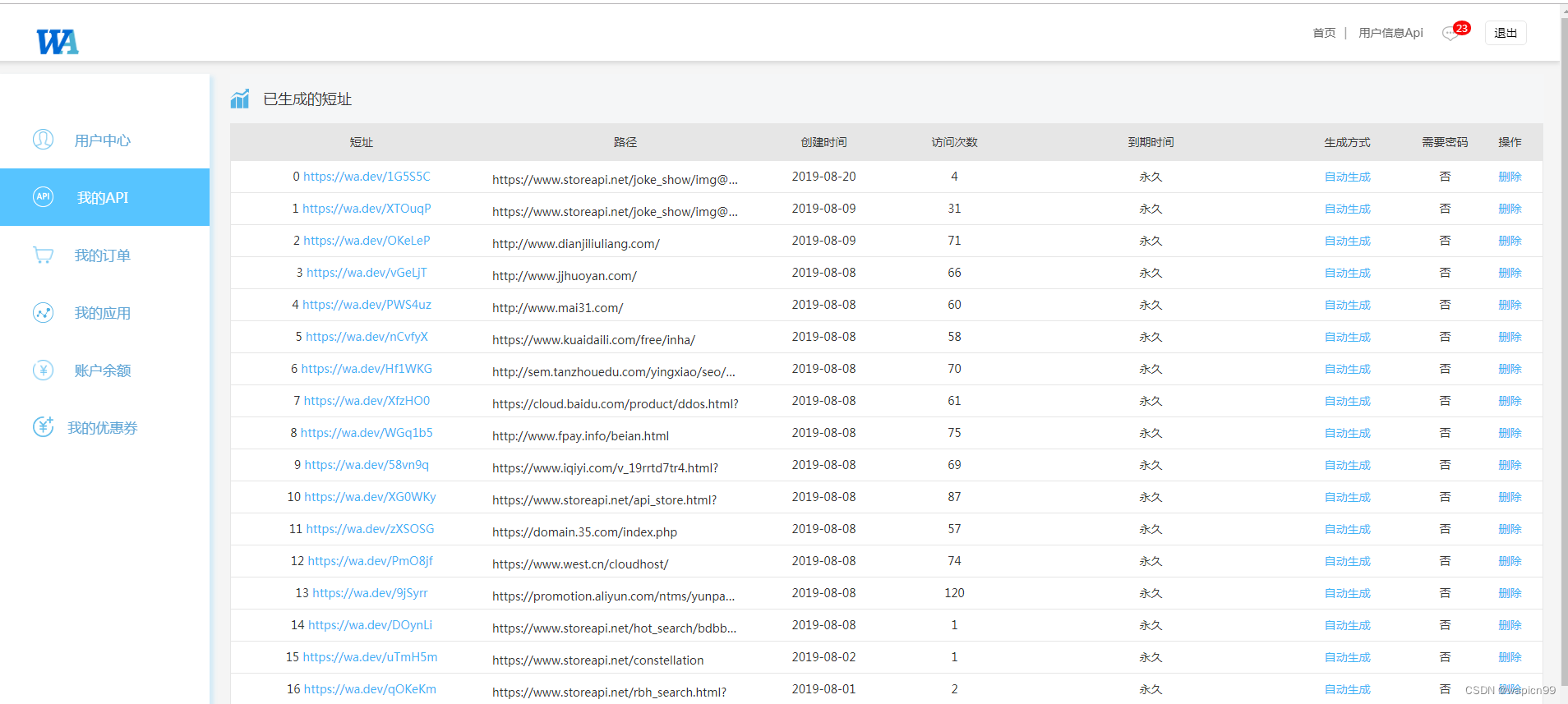
什么是短网址?如何调用接口生成短地址?
随着网络应用的深入和普及,网址资源越来越少了,长尾网址也派上用场了,只是网址太长不方便识别与记录。因此,就有了短网址替代长网址的技术接口。 随着SEO的重要性越来越明显,在推广的时候如果把网页链接缩短可以获得更…
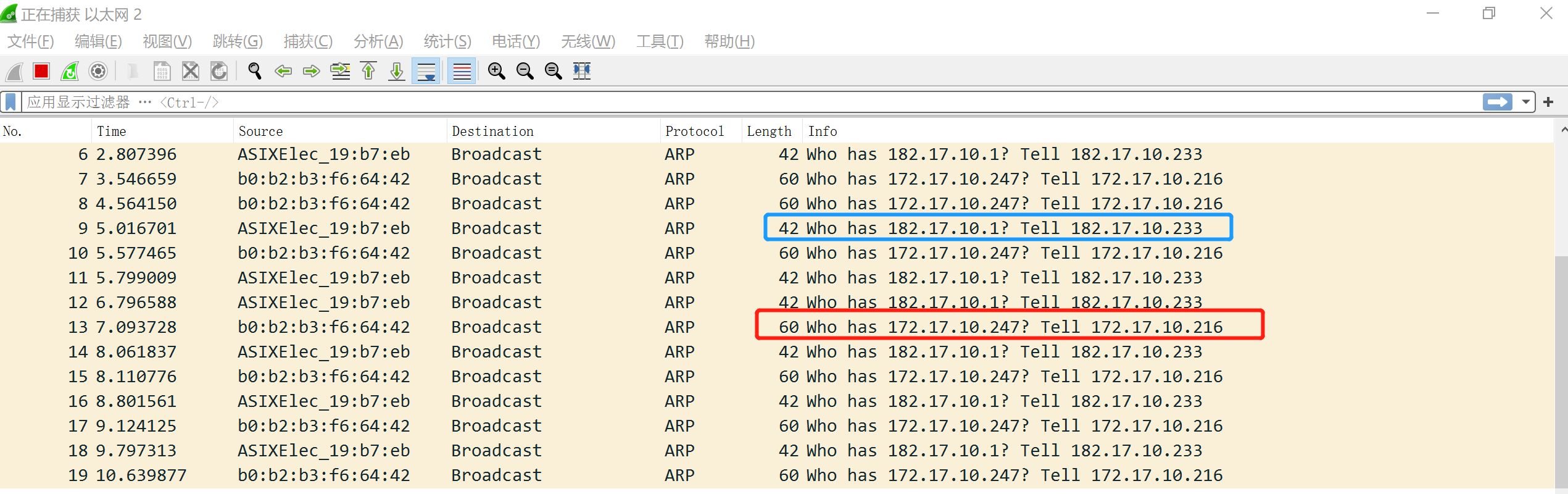
【wireshark】如何获取一个设备的IP地址
问题
开发中往往会出现无法知道设备正确的IP地址,从而无法连接到设备。
解决方式:
使用软件工具wireshark来获取设备IP地址。 可以实现不同网段捕获设备IP
具体流程:
1. 下载wireshark抓包程序
https://www.wireshark.org/download.htm…

MySQL日志(undo log 和 redo log 实现事务的原子性/持久性/一致性)
日志的重要性
日志绝对是数据库的核心. 持久化的日志记录了各种重要的信息.数据的恢复需要依赖日志。 慢查询sql语句需要用到慢查询日志。以及错误日志中保存着mysqld数据库服务端在启动过程中发生的重大错误信息...
数据库重要组成
本质上来说是一个文件系统 (两大重要组…

PHP+MySQL基于thinkphp的企业信息销售展示系统的设计
公司企业网站,是一个供为企业推广的平台,是完全的,高速的,开放的,其核心思想是提供一个以自然语言为主的用户界面,让用户能够更好的刚加方便快捷的管理物流信息的一个渠道和平台。本课题的开发工具可以使用PHP开发语言和MySQL数据进行的开发。 该系统的基本功能包括用户注册登录…
JAVA 设计模式篇
JAVA 设计模式篇1、UML类图2、设计原则2.1、开闭原则2.2、里氏代换原则2.3、依赖倒转原则2.4、接口隔离原则2.5、迪米特法则2.6、合成复用原则3、设计模式3.1、单例模式3.1.1、单例模式实现——饿汉式3.1.1.1、静态变量实现3.1.1.2、静态方法实现3.1.1.3、枚举方式3.1.2、单例模…

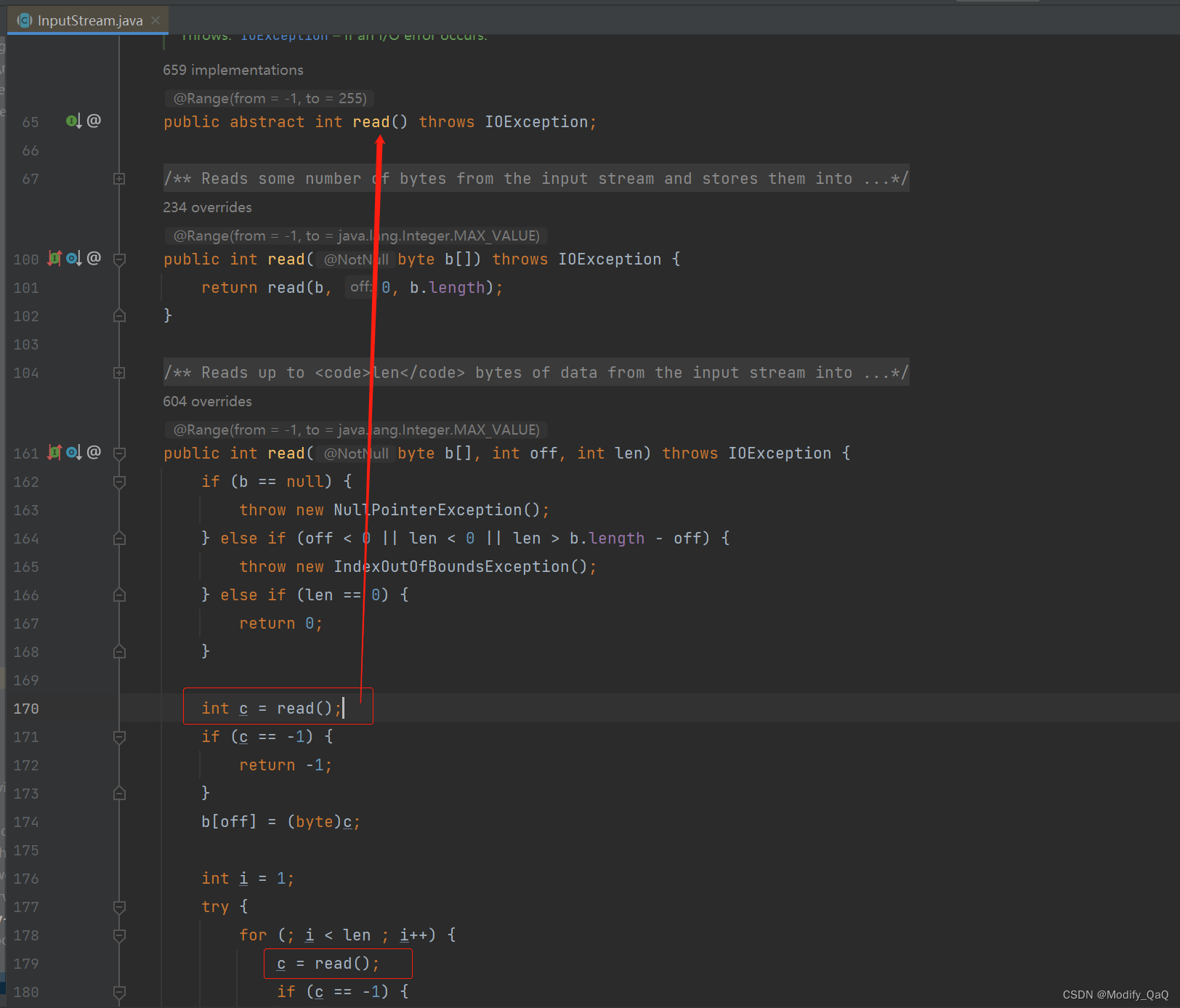
Linux 中的文件简单说明
Linux 中的文件简单说明
作者:Grey
原文地址:
博客园:Linux 中的文件简单说明
CSDN:Linux 中的文件简单说明
说明
本文基于 CentOS 7
根目录(/)下文件夹主要作用
[rootlinux /]# ll /
total 16
lrwxrwxrwx. 1 root root…

VMOS虚拟机开源,游戏安全面临新挑战
相信大家对虚拟机并不陌生,一台设备可以模拟出多个操作系统,完美解决了不同场景下设备限制问题,还节约了购买软硬件设备的成本,为工作和生活提供了不少便利,得到了广泛的应用。
而虚拟机技术却被游戏黑灰产所利用&…

全球约有 150 亿台设备在运行 Java,收费后还能用吗?
据估算,全球约有 150 亿台设备在运行 Java™。约900万 Java 程序员.... https://www.oracle.com/java/technologies/downloads/archive
一、Java8及之前的版本均免费
我们可以看到上图中绿色的部分均是免费版本大家可以随便下载随便使用。
二、最后的免费版本 jd…
将光耦合进入单模光纤的最佳工作距离
摘要 光纤是现代光学系统中最通用的部件之一。它们最重要的特点之一是它们能够在远距离(甚至几公里)内以极低的损耗传输光能。另一方面,以一种能够达到尽可能高的效率的方式将光耦合到光纤中通常是一项非常精细的需求:例如&…
美苏太空竞赛历年卫星火箭发射以及历史事件介绍
1957
时间苏联美国折叠时间7月16日在与政府官员的会晤中,科罗廖夫和格鲁什科提出了开发超重型火箭的想法。美国海军对先锋号火箭进行试射。5月1日10月4日卫星号火箭发射了斯普特尼克1号,即第一颗人造卫星。美国海军对先锋号火箭进行试射。10月23日11月3…
ArcGIS API4.X + API文档 本地部署(Tomcat)
前言: js.arcgis.com有时候不太稳定,导致项目或者自己测试代码需要等待远程资源请求,体验感及其不好,能自己掌控的资源最好就别去拿在线的,当然服务器稳定就另当别论。(所以本地部署有两种含义:…

ModStartCMS v5.3.0 任务调度记录,模块市场优化
系统介绍
ModStart 是一个基于 Laravel 模块化极速开发框架。模块市场拥有丰富的功能应用,支持后台一键快速安装,让开发者能快的实现业务功能开发。
系统完全开源,基于 Apache 2.0 开源协议,免费且不限制商业使用。 功能特性 丰…

在vue项目中下载swiper出现:Do not use ‘new’ for side effects报错问题
我报错的情况是:我在单文件组件vue文件中使用new Swiper,报了两个错误,图示: 第一个错误是:‘Swiper’ is not defined
第二个错误是:Do not use ‘new’ for side effects 解决办法:
&#x…
【软件测试】7年资深带你详探什么是测试开发?
目录:导读前言一、Python编程入门到精通二、接口自动化项目实战三、Web自动化项目实战四、App自动化项目实战五、一线大厂简历六、测试开发DevOps体系七、常用自动化测试工具八、JMeter性能测试九、总结(尾部小惊喜)前言
在一些大公司里&…
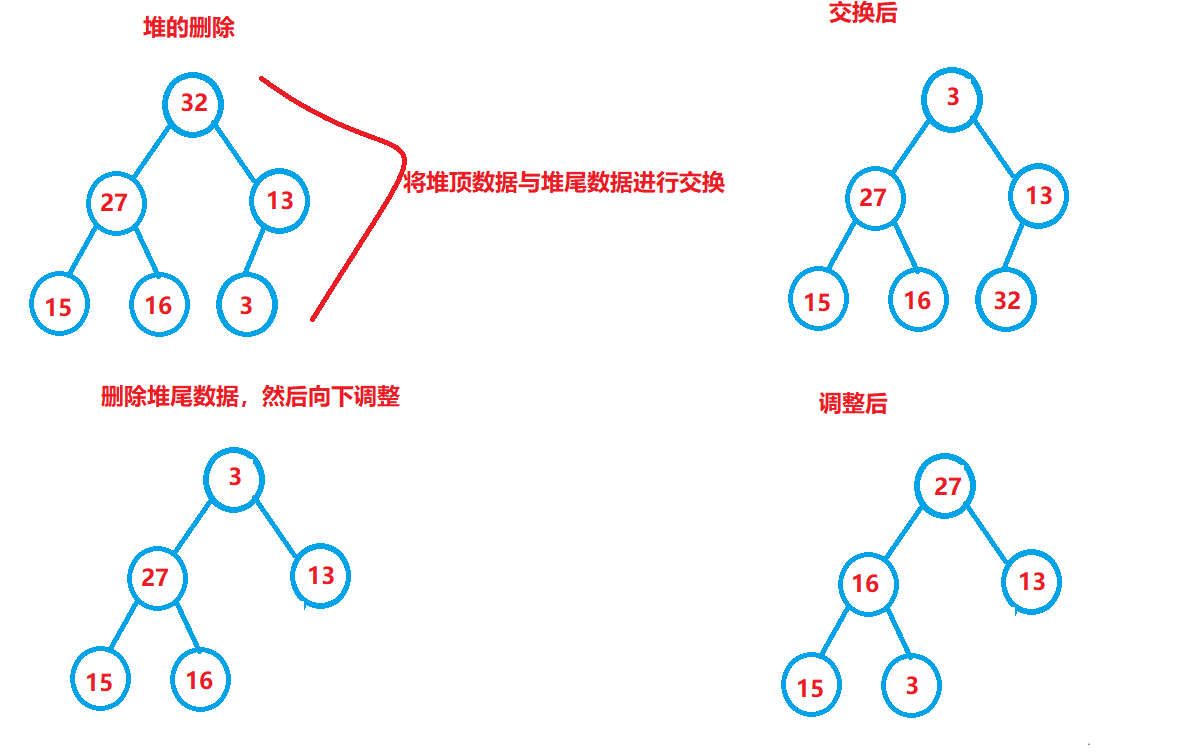
数据结构初阶--二叉树介绍(基本性质+堆实现顺序结构)
树的基本概念和结构
树的相关概念 节点的度:一个节点含有的子树的个数称为该节点的度; 如上图:A的为2叶节点或终端节点:度为0的节点称为叶节点; 如上图:D、F、G、H为叶节点非终端节点或分支节点࿱…
![Unity笔记(13):Android Movement of Characters[2D]](https://img-blog.csdnimg.cn/702e585bc69f4a9996b11a3f9aeec968.png)
Unity笔记(13):Android Movement of Characters[2D]
目录
1、搭建一个测试场景
2、建立画布设置移动按钮
3、编写脚本绑定按钮
AxisTouchButton :ButtonHandler :
4、编写脚本绑定角色
原来的按键移动
修改为触摸按钮
5、导出为APK文件,手机下载进行测试 1、搭建一个测试场景 2、建立画…
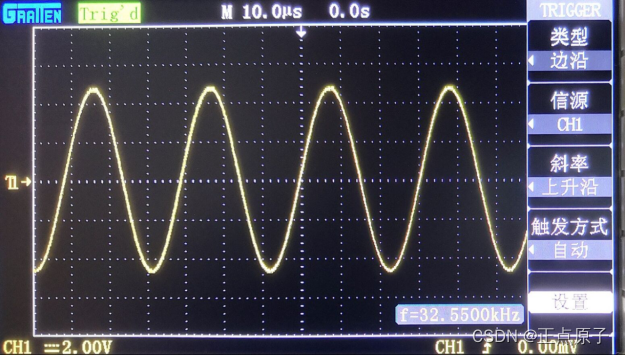
【正点原子FPGA连载】第二十四章 双路高速DA实验 摘自【正点原子】DFZU2EG/4EV MPSoC 之FPGA开发指南V1.0
1)实验平台:正点原子MPSoC开发板 2)平台购买地址:https://detail.tmall.com/item.htm?id692450874670 3)全套实验源码手册视频下载地址: http://www.openedv.com/thread-340252-1-1.html
第二十四章 双路…