every blog every motto: There’s only one corner of the universe you can be sure of improving, and that’s your own self.
https://blog.csdn.net/weixin_39190382?spm=1010.2135.3001.5343
0. 前言
目标检测入门实战教程
1. 正文
1.1 感性认识
我们想做的事,其实并不复杂。说白了就是输入一张图,输出对应的有标框(标注对应的物体)的图。如下图所示:

更进一步,如下图所示,通过不断循环,以实现优化效果。
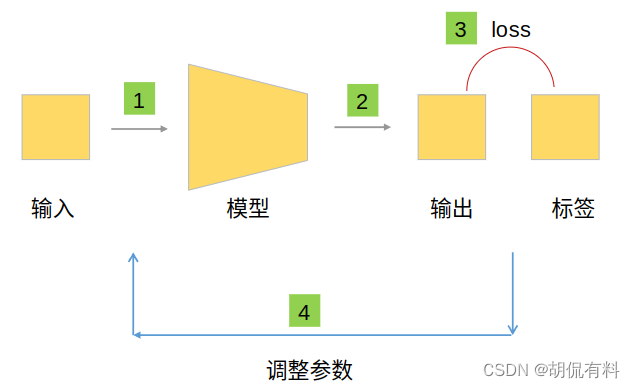
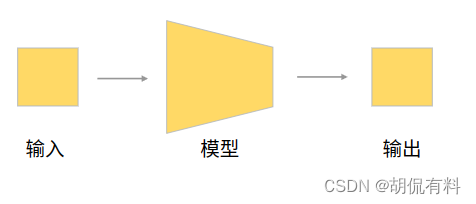
当我们训练完成(模型参数调整合适时),我们即可以直接用该模型:
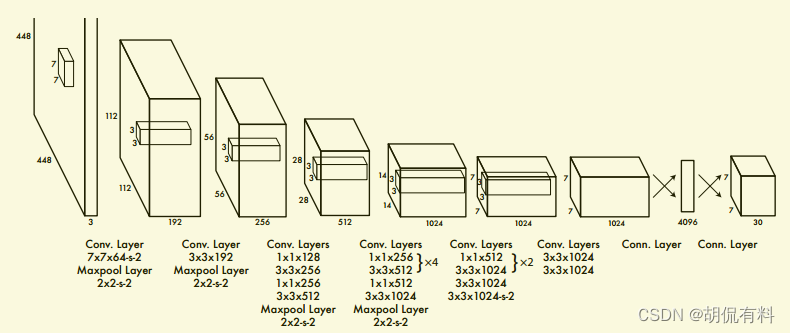
下图为网络的模型结构图:
1.2 前提梗概
在网络中,一切都是以数据形式存在的,更具体是以“数组”的形式存在。
1.2.1 当我们谈“物体”落在某个格子中 ,就由那个格子负责,我们在谈什么?
要回答这个问题,我们先回答以下问题。
1.2.2 当我们谈“物体”的时候,我们在谈什么?
下图是算是“经典”示例图了,
当我们谈图中物体“狗”时,我们说的时“狗这个区域”,这是较为直观的理解。
反映在程序中,这一张图片是一个多维数组(三维,长宽和通道),所以,在程序中,体现的是狗这个区域在三维数组中的数值。

上述说的区域,是另一类任务,分割。在目标检测中,我们谈“物体”,我们谈的又是什么呢?
自然,是目标框,如下图所示,我们说到物体,本质还在说这个框,因为我们需要的也正是这个框。
反映在程序中,是这框的四个顶点(坐标),是的,在程序中我们由四个顶点也就确定了这个框。这个框还有另一种说法(表示): 中心坐标,框的长宽,即**(x, y, w, h)**。
所以,当我们谈物体的时候,是在谈框(包围框,包围物体的框),是在谈四个顶点,更是在谈**(x, y, w, h)(中心表示法,行文称呼,不知道有没有统一规范的称呼)**
微小结: 当我们谈物体的时候,我们在谈(x,y,w,h)

1.2.3 当我们谈“格子”的时候,我们在谈什么?
在一个宽泛的世界中,我们需要坐标(系)进行定位,这不得不谈到,诸如,北京54,西安80坐标系,CGCS200等等,我们普通人更熟悉的经纬度。通过坐标(系),我们能够准确知道其位置。
那在程序,图片中,有坐标(系)吗?
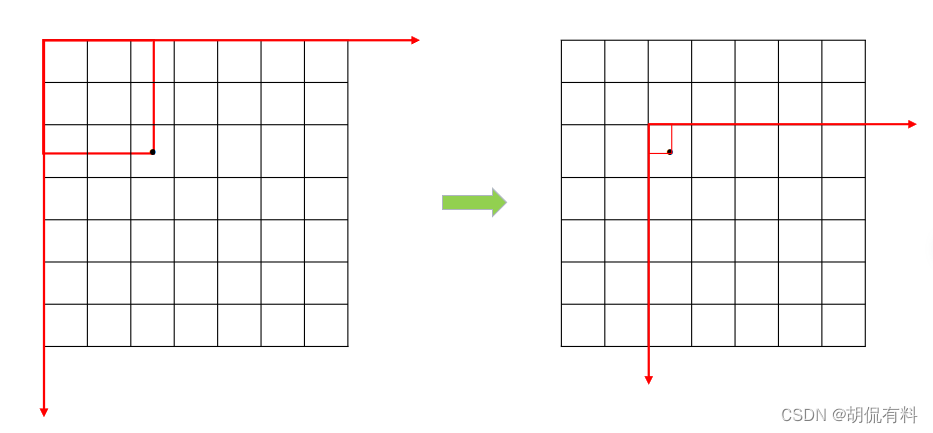
答案是有的,坐标原点在图片左上角,x轴水平向右,y轴竖直向下,如下图所示:
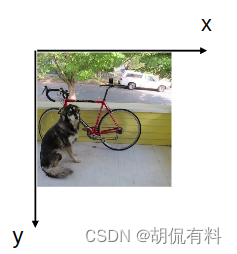
在上一小结中,我们已经将“狗”转换成(x,y,w,h)这种形式。这种表示更核心的是其坐标(x,y),这个坐标可以在上面的坐标系下确定狗的位置。
现在,(理论上)可以对坐标进行预测了。why?
狗在图片有一个坐标(注意,我们这里说的中心坐标,即,狗包围框的中心坐标)。此外,在一张图片中有若干个物体,假设是n,预测的坐标m个(m>>n),若图片大小为256,256,那么就有可能预测256*256个点。
那么,我们怎么知道预测的点是“狗”呢?换句话说,我们怎么让,狗的真实坐标和预测为狗的坐标进行损失计算呢?
这里是不知道的(严格来说可以知道,但计算起来依然不经济),比较可行的办法,是依次计算,那么就有n*m次运算,这还只是一次的计算过程,已经非常庞大了,在实际上是不可行的。
那么需要怎么做呢?
需要对预测的点进行筛选,或者说限定,进一步降低预测的个数,这样整个计算量会小很多。
像城市一样,划区,比如,高新区、经开区,通过这个区,也就知道一个人的大概位置了。
在图片中呢?没错就是,格子,只要告诉在第几行,第几列,也就知道了大概位置。
如下图所示,狗(注意:我们说的中心表示法,xywh)肯定会出现在一个格子里面,注意:这就是物体落子格子中 (一种“生动”的说法)
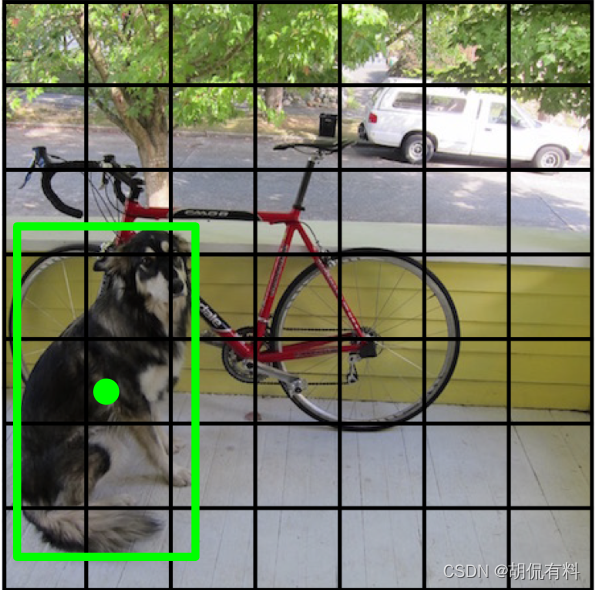
同时,这个格子里面也会预测若干个物体,这里假设为k个(k<<m),
所以,这次的计算就是1k,(一个格子一条狗)这个数量是远远小于nm的。在实际计算中,也更加可行。(一个格子里面“落入”的物体(中心)可能不止一个,这个暂时不考虑)
这就是**“由这个格子负责预测狗”**,即,同样是种“生动”的说法,在深度学习中,类似这种“拟人”,“生动”的说法不胜枚举,诸如:“喂入数据”…,
搞明白了其本质也就那么一回事,各位读者自不必心生畏惧。

至此,我们也就知道了,物体落入格子,由那个格子负责预测究竟在说啥了。
1.3 究竟该怎么表示“狗”?
我们这里依然把模型当做黑盒,或是一个函数。对于一个函数,我们只需要把握输入和输出即可。
因为输出和标签要进行损失计算,自然,二者的形式(数组的形状,和每个位置代表的数值含义是一样的),所以我们要搞清楚标签是如何表示数据的。
对于上图的狗,我们知道狗“落”在其中一个格子中(注意:这里说的狗是包围框的中心),那么我们这里也就确定了狗在哪了。比如下图,我们给狗所在的位置赋值3,也就是说狗和3这个值一一对应,其他物体再赋一个别的值,自然实现了区分。(为什么要赋值?因为在程序中一切都是数据,我们用3表示狗,回头预测的时候,在把3还原成“狗”这个汉字,也就好了)
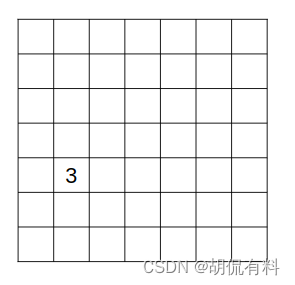
这样我们就能预测狗了吗?
注意,我们的目标是什么,是要预测是狗,更是狗这个包围框,而包围框在前文中,我们已经转换成x,y,w,h这种形式了。
上面只能预测位置(这个位置实际也是不对的),但是还缺少wh。细心地朋友可能发现了,上面是二维的,转成三维能够存储的数据也就多了。
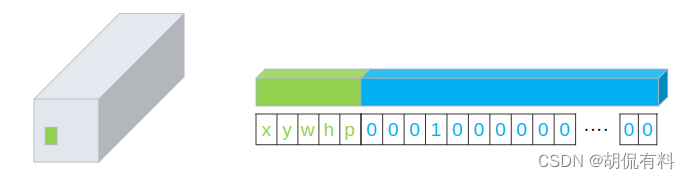
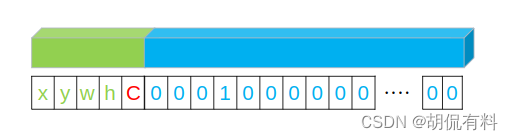
如下左图所示,狗的位置在绿色的格子中,我们将格子抽出来横着放,如右图所示。前5个分别放狗的中心坐标x,y,狗包围框的长宽,以及是不是狗(如果是是框,放1,不是框,放0),后面20位是物体的one-hot编码。
这样我们就可以将这个框和这个框代表的类别完整表达出来。
我们预测值(输出)和真值,就可以计算二者之间的差距了(损失)。
在论文中,作者会预测两个框,每个框和真值计算IoU,结果大的代表我们预测的物体。

1.3 标签中的数值
在训练中,我们常将数据进行归一化,方便计算。对于图片,我们可以简单粗暴的将值除以255,缩放到0-1之间。那么对于标签我们怎么归一化呢?
对于类别,我们采用one-hot编码,对于置信度(或者说概率),采用0或1,现在就剩下x,y,w,h。
图片中的物体可能存在任何位置,且长宽不固定,对其归一化只需除以图片的长宽即可。
对于xy同样可以除以图片的长宽。但是还有更巧妙的办法,原始的xy是相对于原点(图片左上角),我们将其变换到相对于所在格子的左上角(可以理解为坐标变换),然后除以格子的长宽即可。
1.4 损失函数
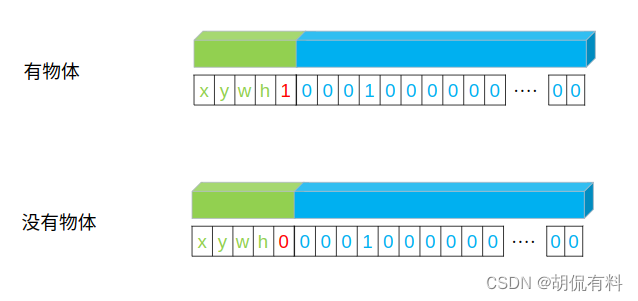
对于标签,我们将数据组织如下形式,没有物体,所有值为0,有物体值为对应的值。如下图所示 :

对于有物体来说,我们需要计算点坐标的差距(损失),长宽差距(损失),还有预测的概率,以及类型的差距(损失)。
我们这里的计算单元是格子,即每个格子中是否物体。论文中将图片划分成S×S的格子,S为7。
因为格子分为有物体和没有物体两种情况,所以损失也分为两种情况。
一张图片一般含有少数的物体。如上图的狗图片,含有狗、自行车、汽车三种物体。而我们的格子有49个。
所以对于有物体和没有物体损失的权重是不一样的。没有物体设置一个小的权重,有物体设置一个大一点的权重。即,
有物体则,
λ
c
o
o
r
d
=
5
\lambda_{coord} = 5
λcoord=5
否则,
λ
n
o
o
b
j
=
0.5
\lambda_{noobj} = 0.5
λnoobj=0.5
1.4.1 有物体的情况
有物体的损失需要将以下四项相加
A. 坐标损失

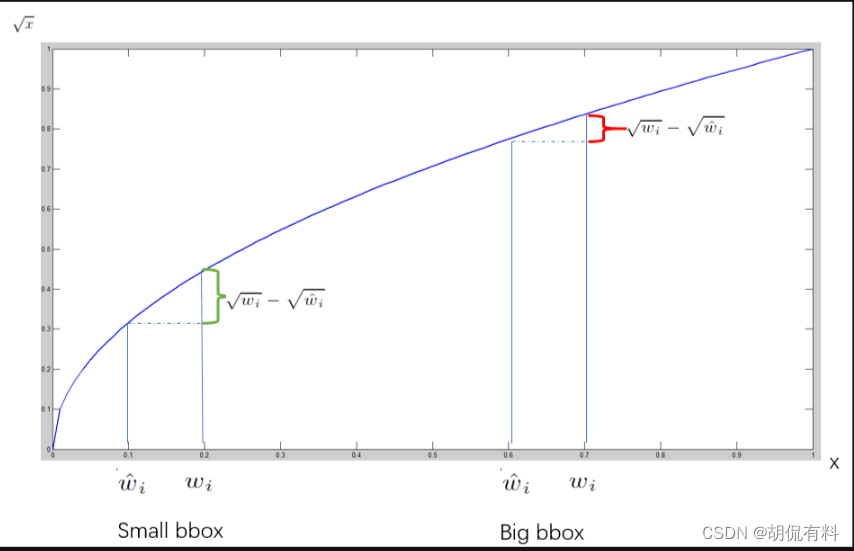
B. 长宽损失
这里对长宽开根号,为什么?
如果没有开根号,
假如有一个小物体包围框为10×10,一个大物体包围框为100×100,他们的预测值和真值偏差都为2,那么损失为(不考虑前面的参数):
2
2
+
2
2
=
8
2^2 + 2^2 = 8
22+22=8
即都为8,但是小框偏差2和大框偏差2严重程度是不一样的。

对小物体偏差要求会更严格,即损失会更大。
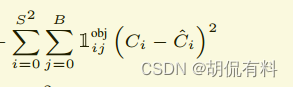
C. 置信度损失
具体后文会分析
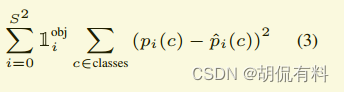
D. 类别损失
即对预测的类型计算损失
1.4.2 没有物体的情况
没有物体我们只需要计算置信度损失即可。

1.4.4 关于置信度的思考
说明: 为方便叙述和观察,以下只显示一个框,即B=1的情况
阅读过其他博客或是原论文的读者可能发现,我们在此前1.3节中将第五位设置成p,似乎和此前大部分博客中说的不同(就我看到的来说,都不相同)。究竟是咋回事?
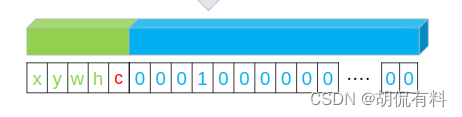
大部分将第五位写作C,也就是置信度。如下图所示:
这种说法即对也不对。为什么?
–
说明: 对于一个值代表什么,我们要看他的标签代表什么,或者说在损失计算时候,他的标签(ground truth)代表什么。
1.4.4.1 部分误读:
在github的代码中,存在部分误读。将第五项当作置信度,如下图所示:
而我们在数据准备阶段时,是如下进行赋值的,即,
- 有物体,该值为1
- 没有物体,该值为0
如果直接计算,
l
o
s
s
c
o
f
=
(
C
i
−
C
^
i
)
2
loss_{cof} = (C_i - \widehat{C}_i)^2
losscof=(Ci−C
i)2
即,
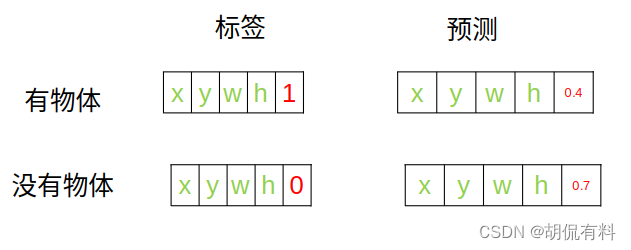
有物体:
(
1
−
0.4
)
2
(1 - 0.4) ^2
(1−0.4)2
没有物体:
(
0
−
0.7
)
2
(0-0.7)^2
(0−0.7)2
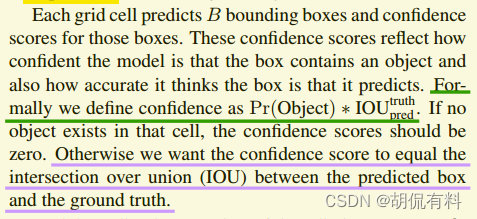
这也是部分github代码中存在的一种写法,可是这对吗?我们看论文会发现,置信度是如下定义的:
c
o
n
f
i
d
e
n
c
e
=
P
r
(
o
b
j
e
c
t
)
∗
I
O
U
p
r
e
d
g
t
confidence = Pr(object) * IOU^{gt}_{pred}
confidence=Pr(object)∗IOUpredgt
可以看到,置信度是预测概率和IOU的乘积,这里都没有用到IOU,而是把该值直接当做了置信度,自然是不对的。
实际在计算预测框的概率。
说明: 这中计算方式也是可行的,但不是论文中提到的置信度。
1.4.4.2 论文的表示:
说明: 下文中的“数据表示(准备)”指的是对标签的处理过程。
因为预测生成的数值,(刚开始)具有随机性,或者说,他只是一个值。其具体的含义要根据标签来定。
上述的这种错误实际是被论文中的表述所“误导”,论文中将第五项表述成置信度。
而实际上,这可以分为两部分。
第一部分是数据准备阶段。即将我们程序将本地数据加载到程序中的一种状态。
第二部分是实际使用阶段。即,在程序实际计算损失时候,第五项代表的含义。
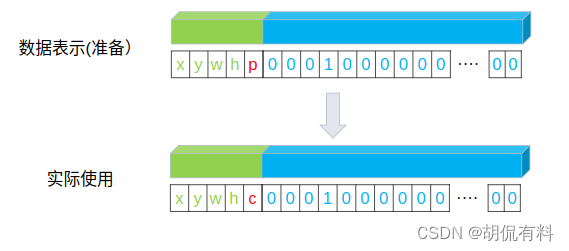
在实际计算时,比如某个格子里面有物体,那么p = 1,所以
c
o
n
f
i
e
n
c
e
=
1
×
I
O
U
=
I
O
U
confience = 1 × IOU = IOU
confience=1×IOU=IOU
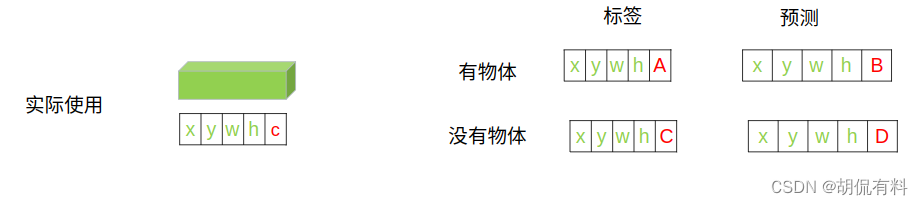
所以,在实际使用ABCD各项代表的含义:
- 标签:A:IOU
- 预测:B: 预测的一个值, 0-1之间
- 标签:C: 0
- 预测:D: 预测的一个值,0-1之间

讨论:
- 可能会有读者,感觉这第五项在计算好像没起作用, 实际上是起作用了,根据这一项,我们可以 将有物体的格子分在一组,没有物体的格子分在一组,然后分开计算,这就是我们前文提到的“负责”。
- 但是,理论上我们可以根据xywh是否有值,也可进行这种划分:) (那么,还是没起作用?:))
那么在实际计算损失时,
有物体:
l
o
s
s
c
o
n
f
=
(
A
−
B
)
2
loss_{conf} = (A - B)^2
lossconf=(A−B)2,即,
l
o
s
s
c
o
n
f
=
(
I
O
U
−
p
r
e
d
)
2
loss_{conf} = (IOU - pred)^2
lossconf=(IOU−pred)2
没有物体:
l
o
s
s
c
o
n
f
=
(
C
−
D
)
2
loss_{conf} = (C - D)^2
lossconf=(C−D)2,即,
l
o
s
s
c
o
n
f
=
(
0
−
p
r
e
d
)
2
loss_{conf} = (0 - pred)^2
lossconf=(0−pred)2
这部分和论文中描述的相同。
1.4.4.3 个人看法
笔者感觉可以将上述两种情况进行结合,或许效果会更好。

第五项放的是置信度。有物体为1,没有物体为0.(当然,可以看做是概率)
我们将预测的概率和IOU相乘,得到一个既包含概率,又包含对坐标点纠正的损失。
- 有物体时
- 标签:A = 1
- 预测:B = pr * IOU
- 没有物体时
- 标签:C = 0
- 预测:D = pr
如果没有物体时,我们标签中是没有框的,所以自然无法计算IOU,所以D=pr
但是,这样在公式方面就没法统一。有物体时,我们计算置信度,没有物体时,我们计算的预测概率。
1). 置信度损失的计算
通过上面,我们置信度这一项的损失有必要重新进行梳理。 l o s s c o f = ( C i − C ^ i ) 2 loss_{cof} = (C_i - \widehat{C}_i)^2 losscof=(Ci−C i)2
A. 当有物体时
l
o
s
s
c
o
n
f
=
(
A
−
B
)
2
loss_{conf}=(A-B)^2
lossconf=(A−B)2, 即,
l
o
s
s
c
o
f
=
(
1
−
p
r
×
I
O
U
)
2
loss_{cof} = (1 - pr×IOU)^2
losscof=(1−pr×IOU)2
B. 当没有物体时
l
o
s
s
c
o
n
f
=
(
C
−
D
)
2
loss_{conf}=(C-D)^2
lossconf=(C−D)2,即,
l
o
s
s
c
o
f
=
(
0
−
p
r
)
2
loss_{cof} = (0 - pr)^2
losscof=(0−pr)2
C. 小结
所以实际置信度损失,应该是:
有物体时:
l
o
s
s
c
o
f
=
(
C
i
−
C
^
i
)
2
loss_{cof} = (C_i - \widehat{C}_i)^2
losscof=(Ci−C
i)2
没有物体时:
l
o
s
s
c
o
f
=
(
p
r
−
p
r
^
i
)
2
loss_{cof} = (pr - \widehat{pr}_i)^2
losscof=(pr−pr
i)2
没有物体时,我们用的应该是预测的概率,而不是置信度,因为没有IOU,所以没办法计算置信度。
1.4.4.4 小结
关于第五项,可以说有两套数据。第一套数据就是最开始的数据,或者说,数据准备时候的数据,他是我们我们制作标签的数据,同时,也是我们预测的数据。
第五项是概率:

但是在实际使用(计算损失),以及,论文表述时,会将第五项表述成置信度,这也就是我们常看到的。
第五项是置信度:
这是由公式转换而来。
至此,我们梳理了几个关键性的概念,接下来从代码层面进行分析。
1.5 代码
1.5.1 模型
模型的核心部分,图片从(448,448,3)变成(7,7,30)
def forward(self, x):
# (448,448,3) -> (7,7,30)
S, B, C = self.feature_size, self.num_bboxes, self.num_classes
x = self.features(x) # (448,448,3) -> (14,14,1024)
x = self.conv_layers(x) # (14,14,1024) -> (7,7,1024)
x = self.fc_layers(x) # (7,7,1024) -> (1470)
x = x.view(-1, S, S, 5 * B + C) # (1470) -> (7,7,30)
return x
1.5.2 训练
训练部分核心代码
for epoch in range(num_epochs):
print('\n')
print('Starting epoch {} / {}'.format(epoch, num_epochs))
# Training.
yolo.train()
total_loss = 0.0
total_batch = 0
for i, (imgs, targets) in enumerate(train_loader):
# Update learning rate.
update_lr(optimizer, epoch, float(i) / float(len(train_loader) - 1))
lr = get_lr(optimizer)
# Load data as a batch.
batch_size_this_iter = imgs.size(0)
imgs = Variable(imgs)
targets = Variable(targets)
imgs, targets = imgs.cuda(), targets.cuda()
# Forward to compute loss.
preds = yolo(imgs)
loss = criterion(preds, targets)
loss_this_iter = loss.item()
total_loss += loss_this_iter * batch_size_this_iter
total_batch += batch_size_this_iter
# Backward to update model weight.
optimizer.zero_grad()
loss.backward()
optimizer.step()
1.5.3 预测
部分核心代码
for i in range(S): # for x-dimension.
for j in range(S): # for y-dimension.
class_score, class_label = torch.max(pred_tensor[j, i, 5*B:], 0)
for b in range(B):
conf = pred_tensor[j, i, 5*b + 4]
prob = conf * class_score
if float(prob) < self.prob_thresh:
continue
# Compute box corner (x1, y1, x2, y2) from tensor.
box = pred_tensor[j, i, 5*b : 5*b + 4]
x0y0_normalized = torch.FloatTensor([i, j]) * cell_size # cell left-top corner. Normalized from 0.0 to 1.0 w.r.t. image width/height.
xy_normalized = box[:2] * cell_size + x0y0_normalized # box center. Normalized from 0.0 to 1.0 w.r.t. image width/height.
wh_normalized = box[2:] # Box width and height. Normalized from 0.0 to 1.0 w.r.t. image width/height.
box_xyxy = torch.FloatTensor(4) # [4,]
box_xyxy[:2] = xy_normalized - 0.5 * wh_normalized # left-top corner (x1, y1).
box_xyxy[2:] = xy_normalized + 0.5 * wh_normalized # right-bottom corner (x2, y2).
# Append result to the lists.
boxes.append(box_xyxy)
labels.append(class_label)
confidences.append(conf)
class_scores.append(class_score)
1.5.4 完整代码
待上传。。。
参考
[1] https://blog.csdn.net/weixin_39190382/article/details/126298644
[2] https://www.cnblogs.com/wangguchangqing/p/10406367.html
[3] https://blog.csdn.net/c20081052/article/details/80236015
[4] https://blog.csdn.net/weixin_43694096/article/details/123523225
[5] https://blog.csdn.net/m0_37192554/article/details/81092514
[6] https://zhuanlan.zhihu.com/p/70387154
[7] https://zhuanlan.zhihu.com/p/89143061
[8] https://blog.csdn.net/wjytbest/article/details/116116966#t7
[9] https://blog.csdn.net/hymn1993/article/details/122858410