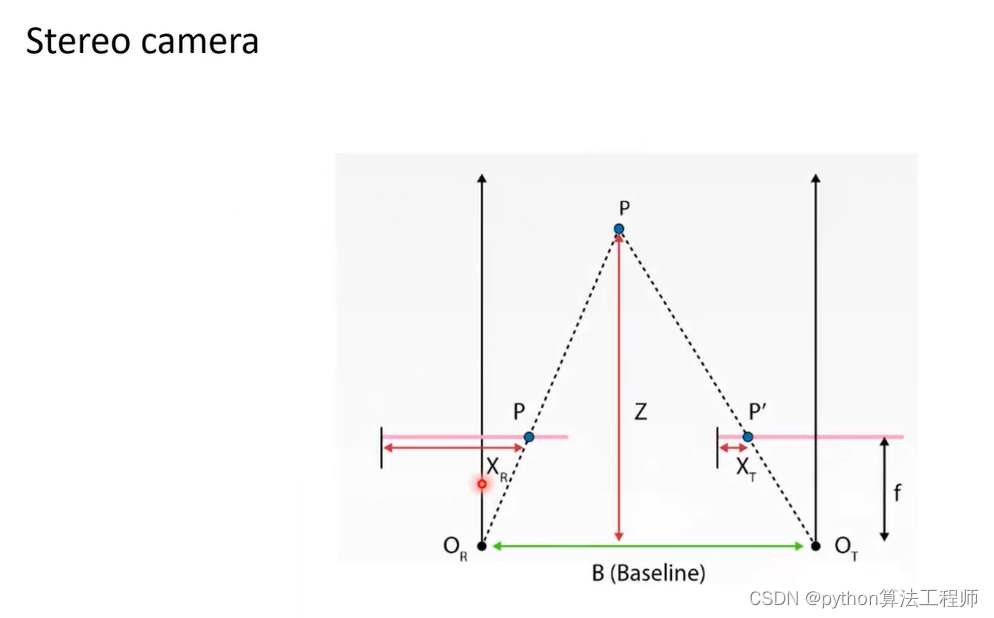
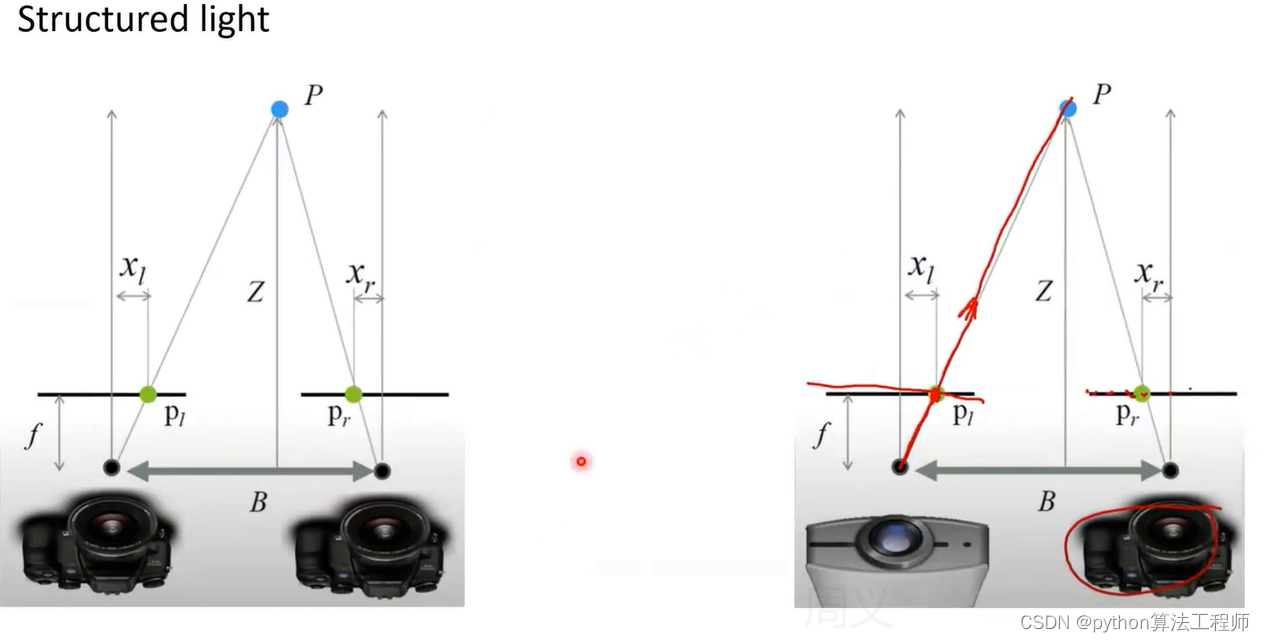
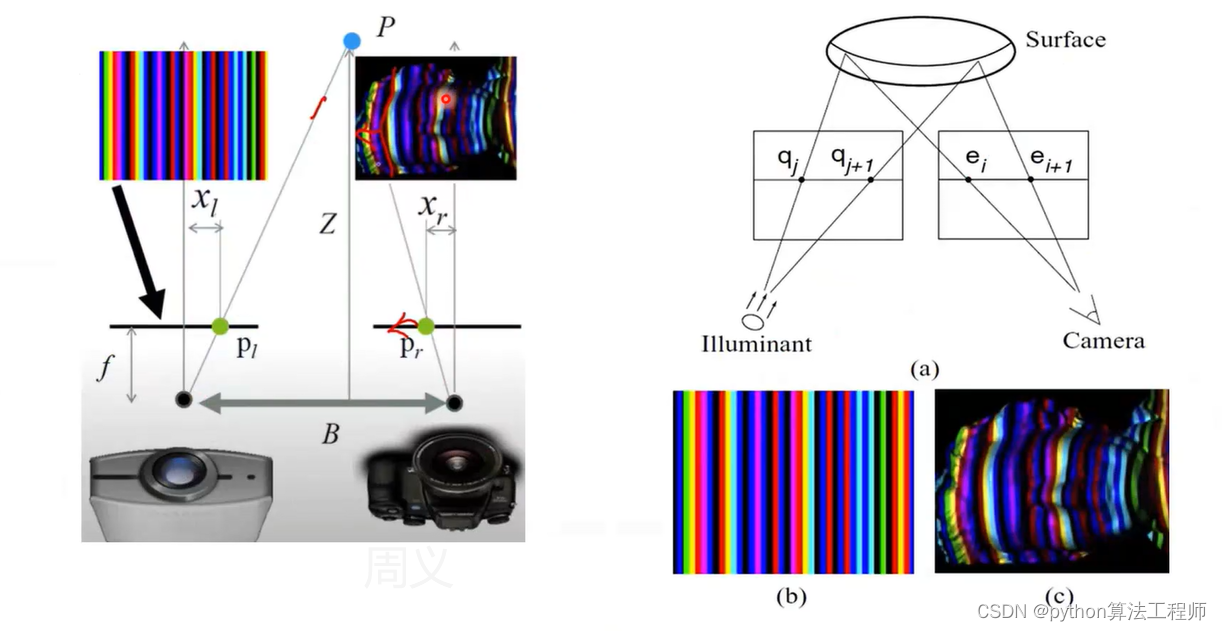
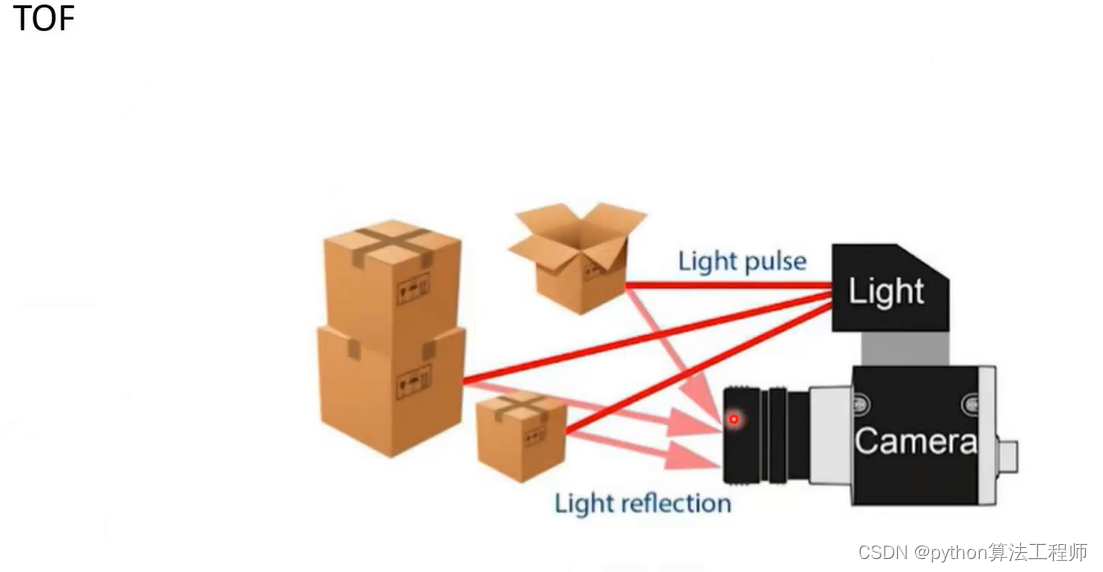
 结构光
结构光
https://www.youtube.com/watch?v=mSsnf5tqXnA
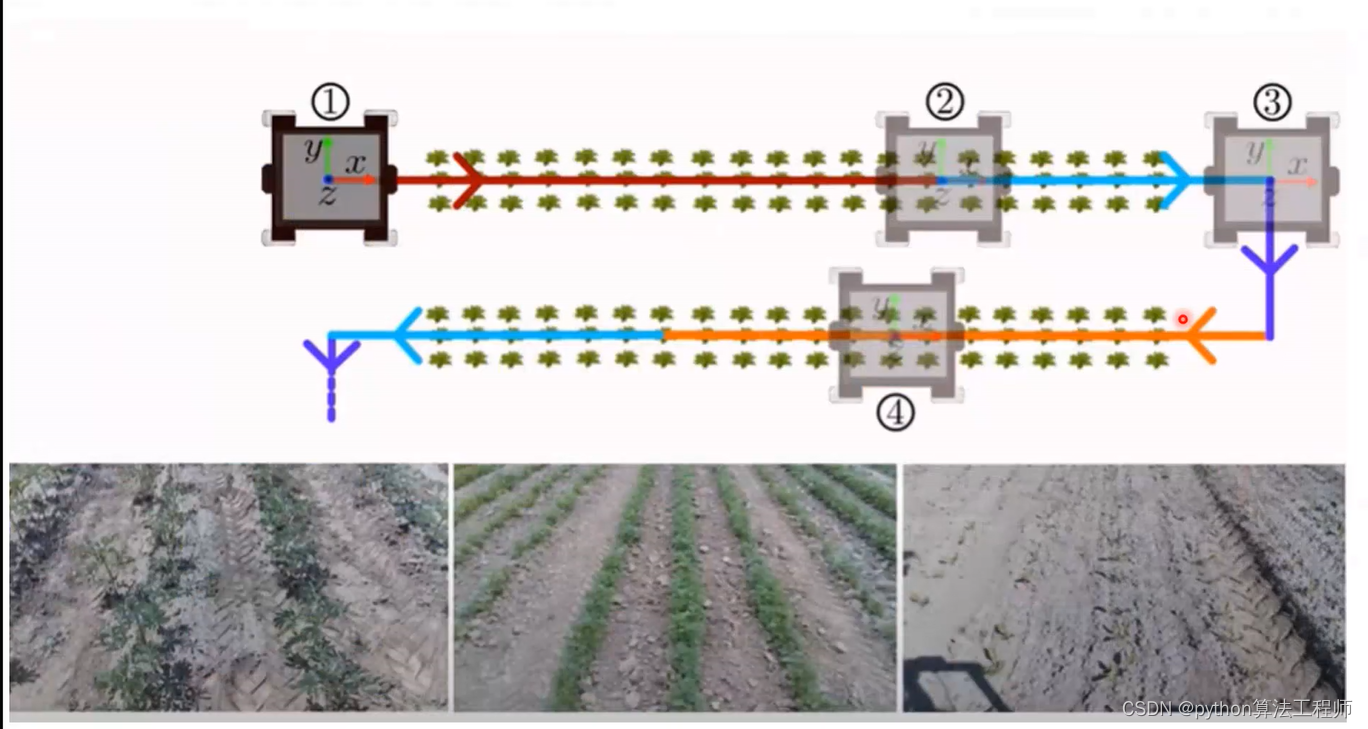
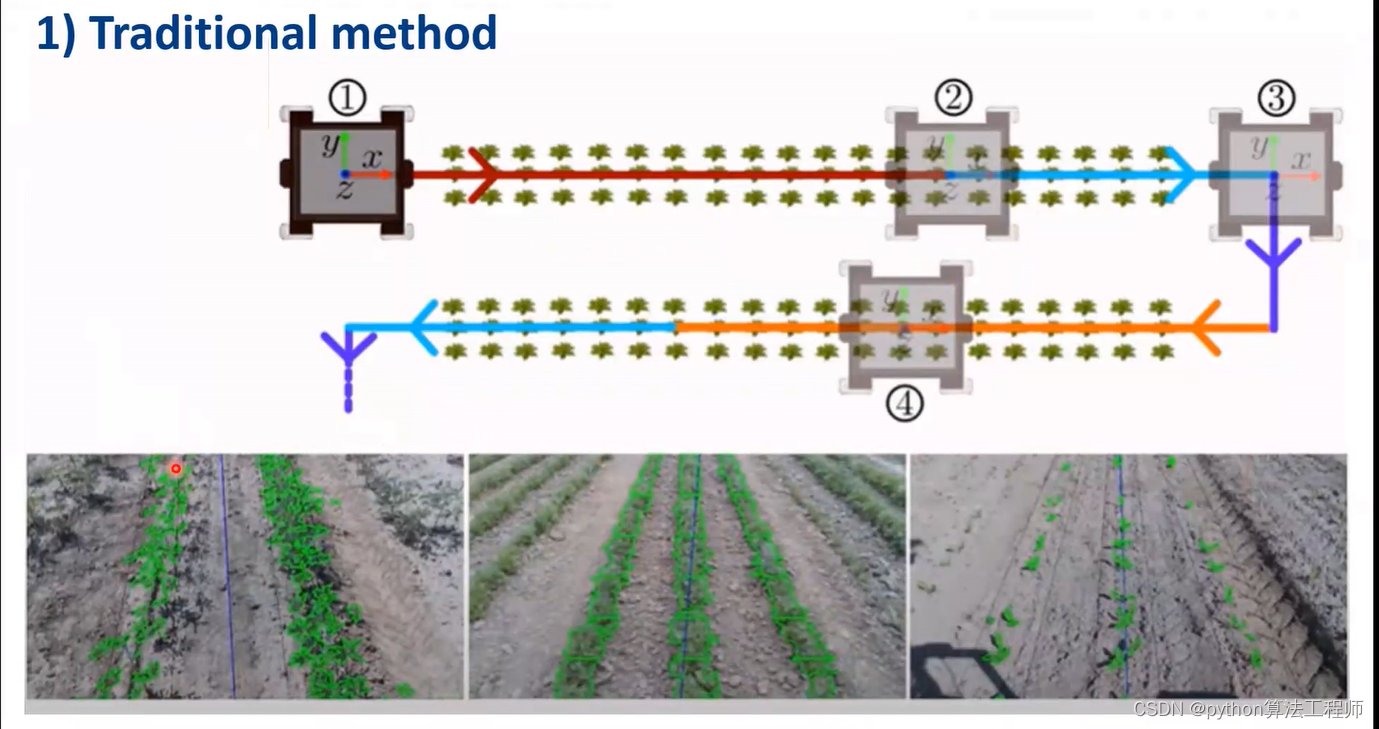
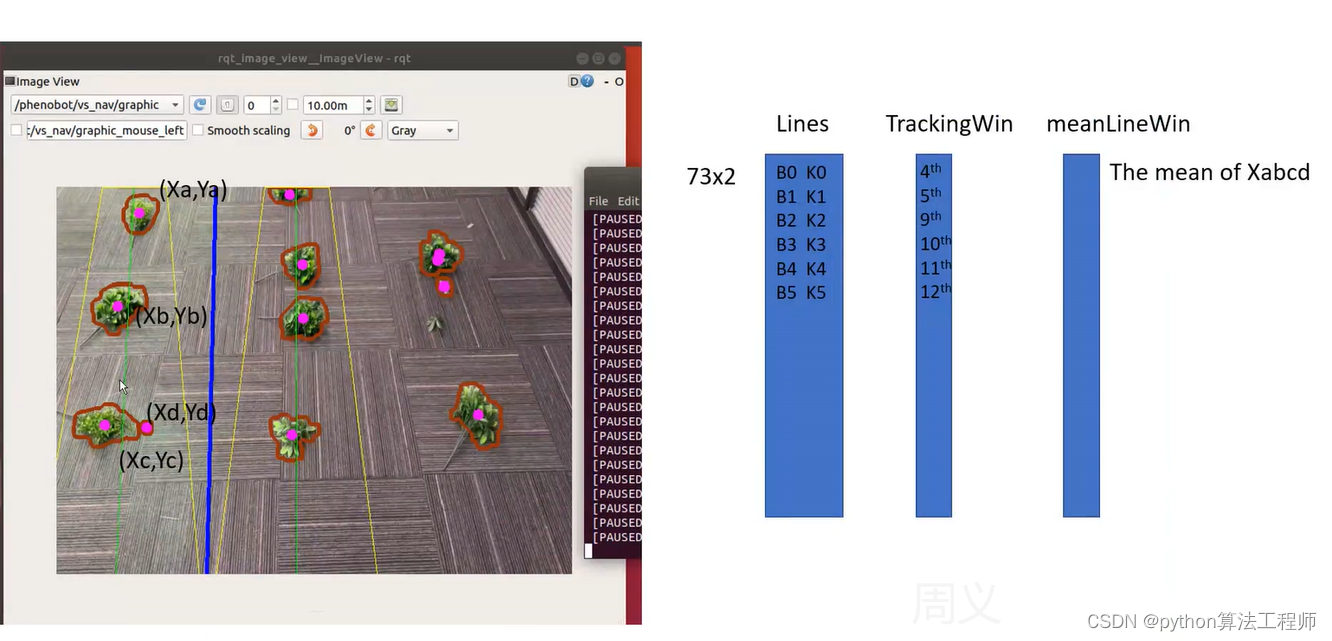
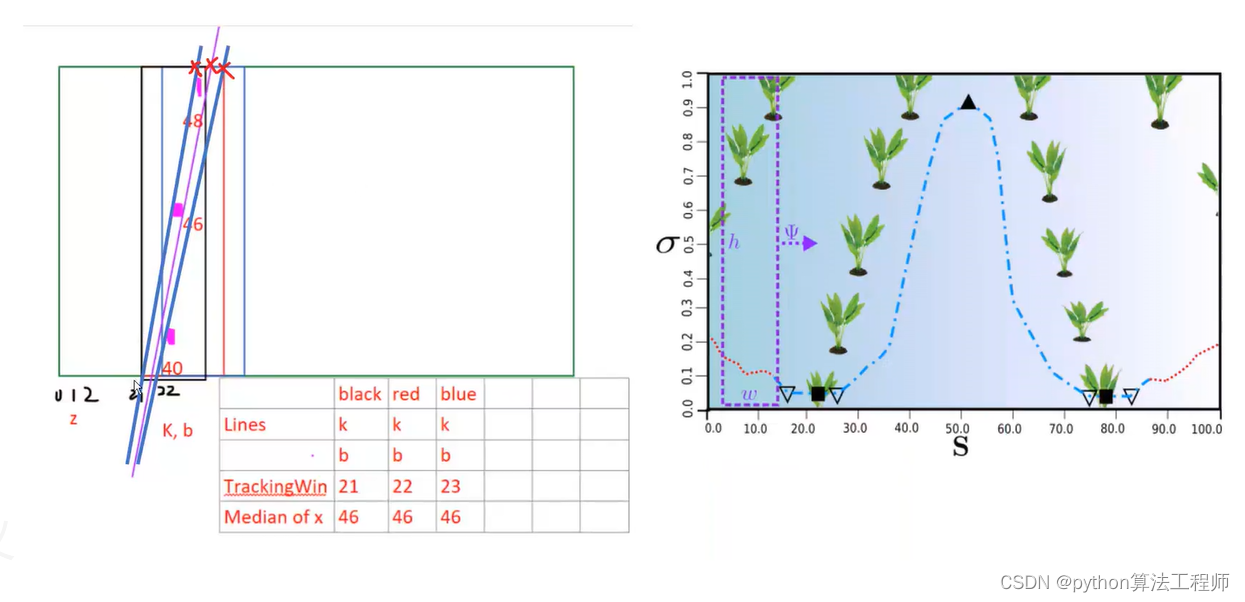
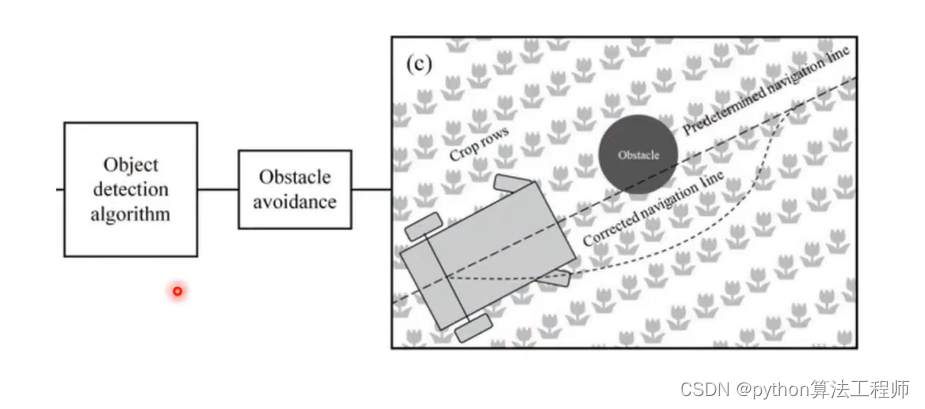 局部路径规划算法
局部路径规划算法
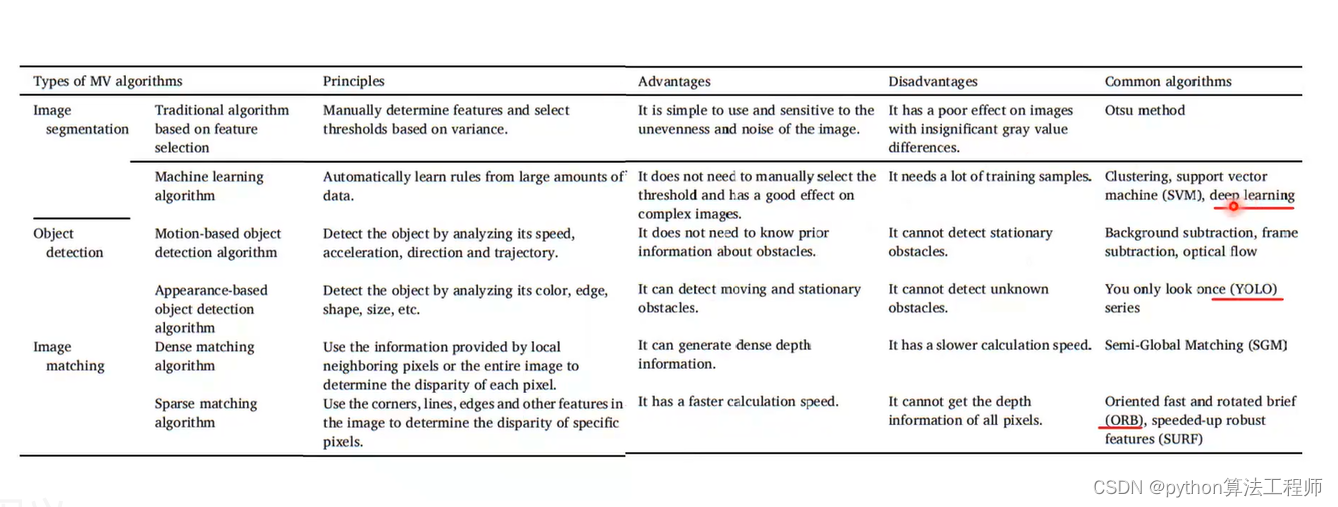
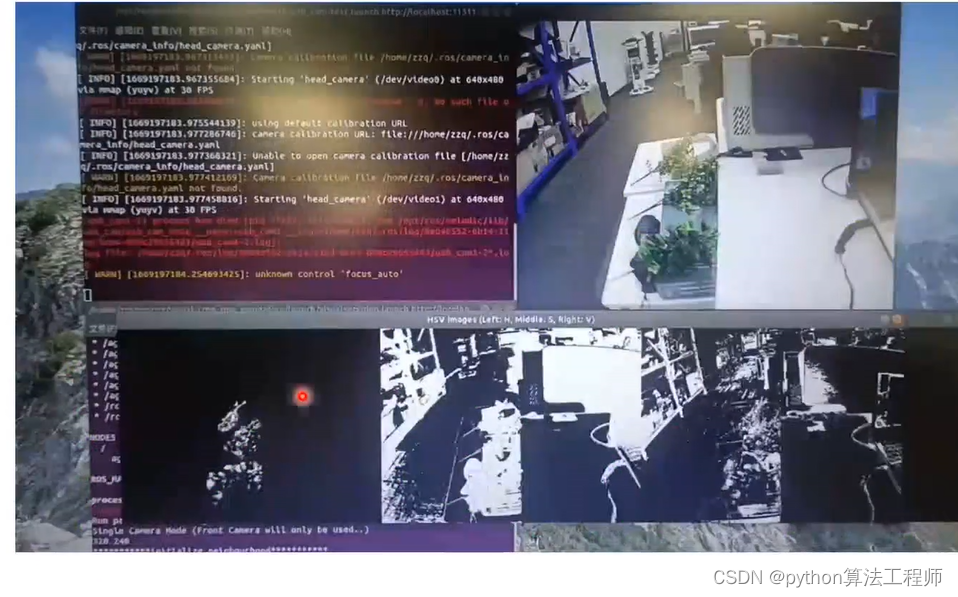
光流法
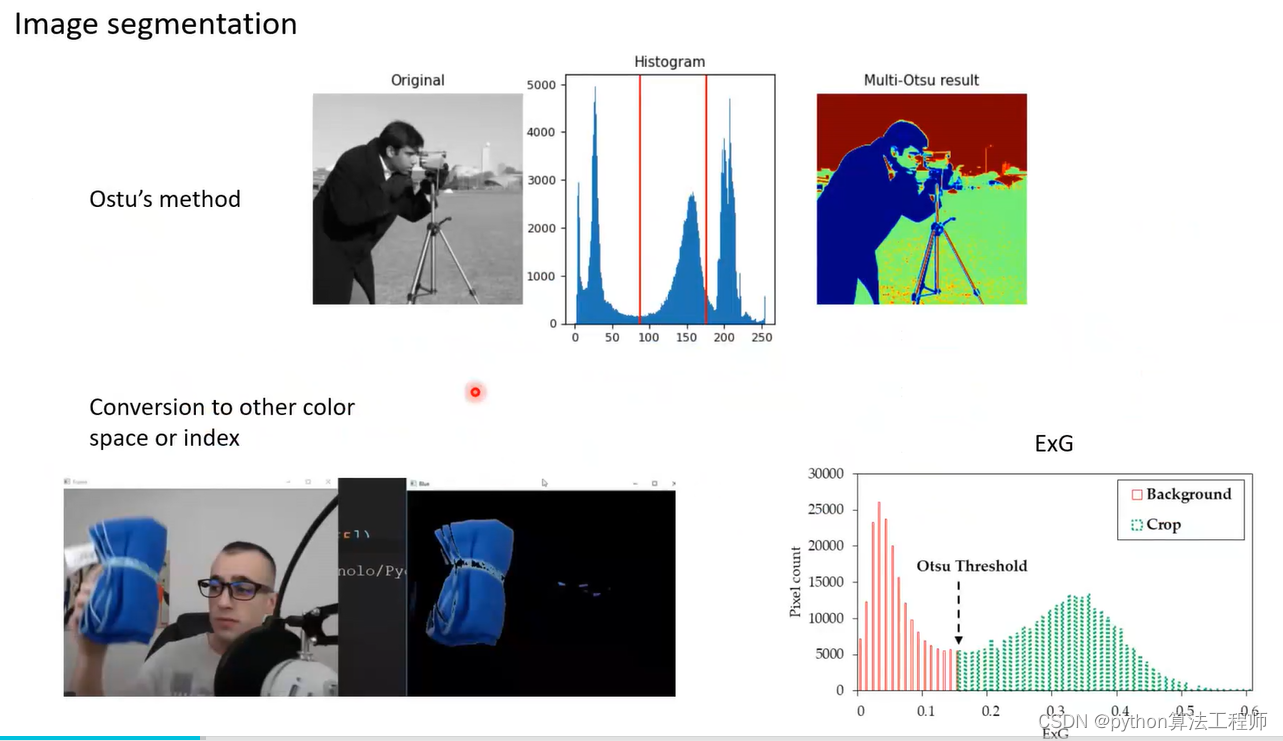
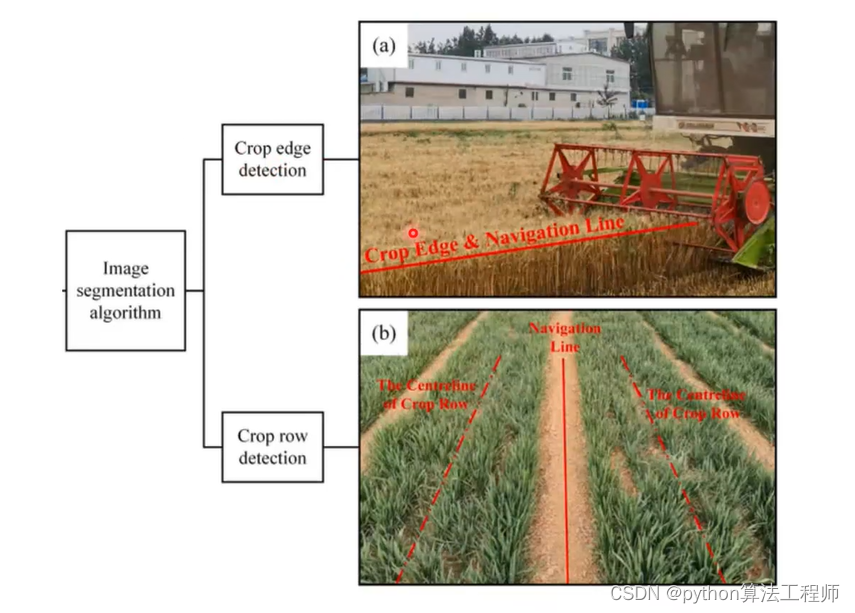
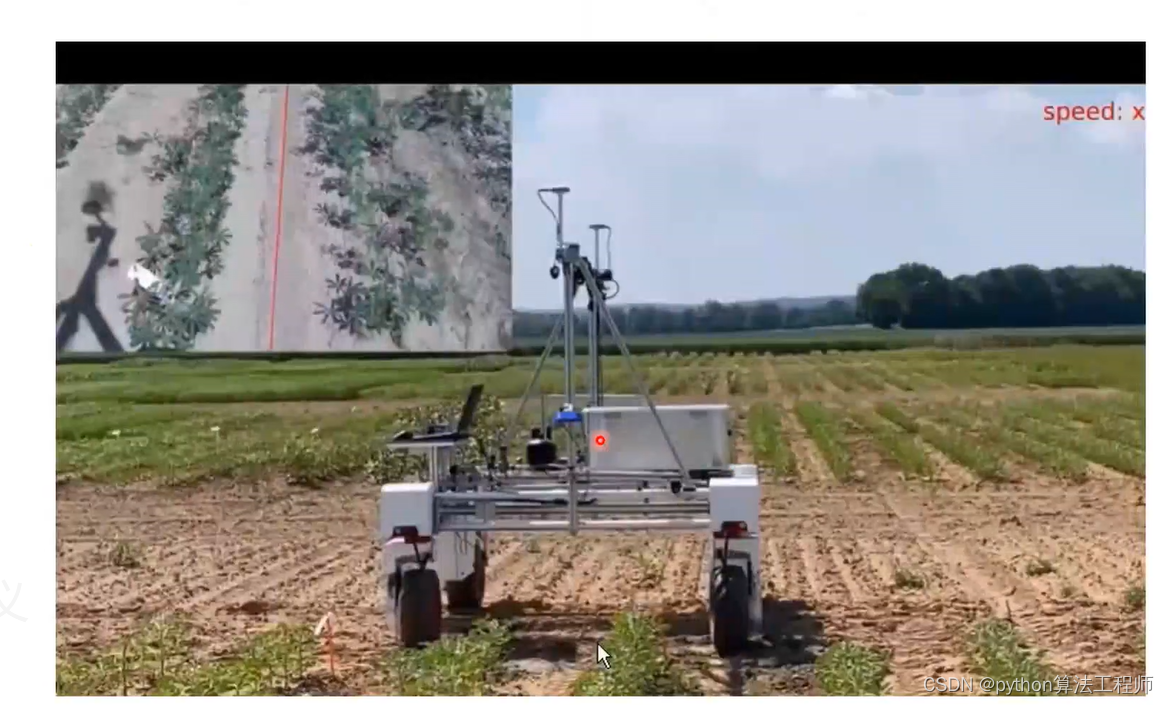
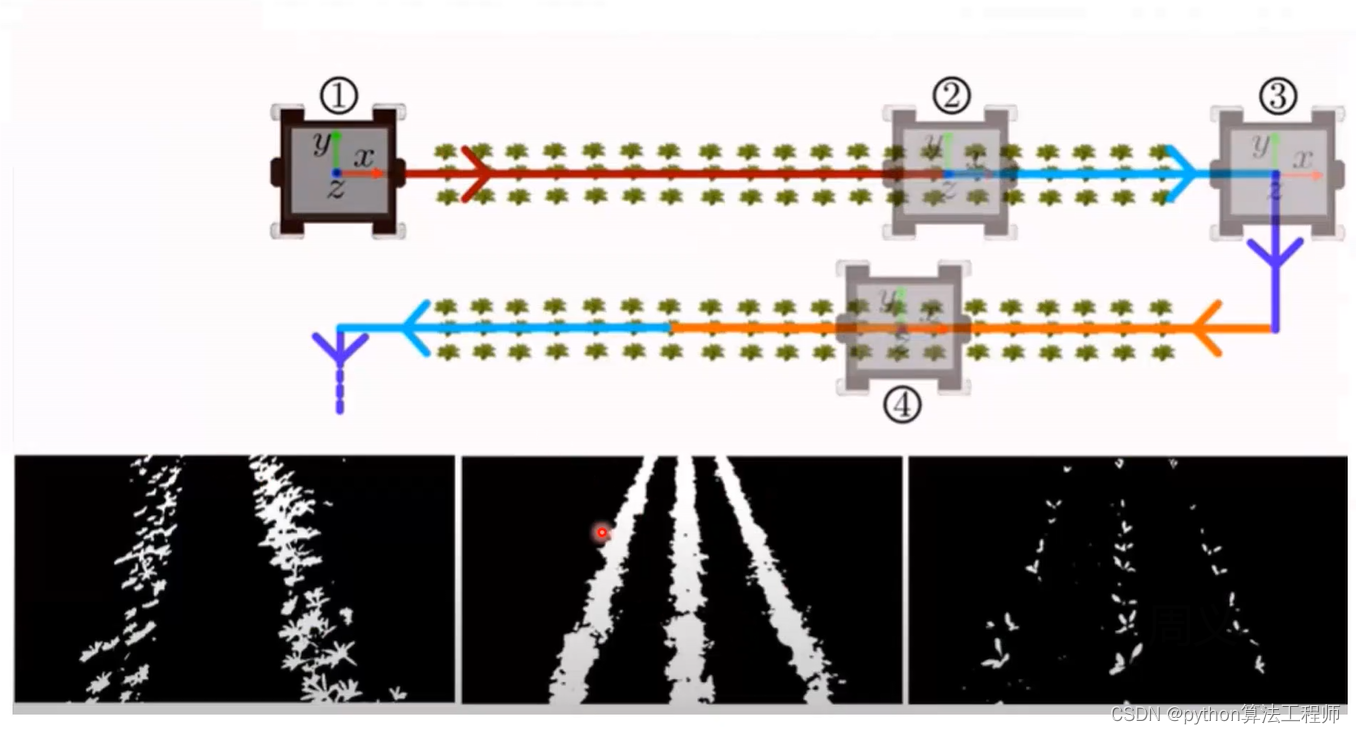
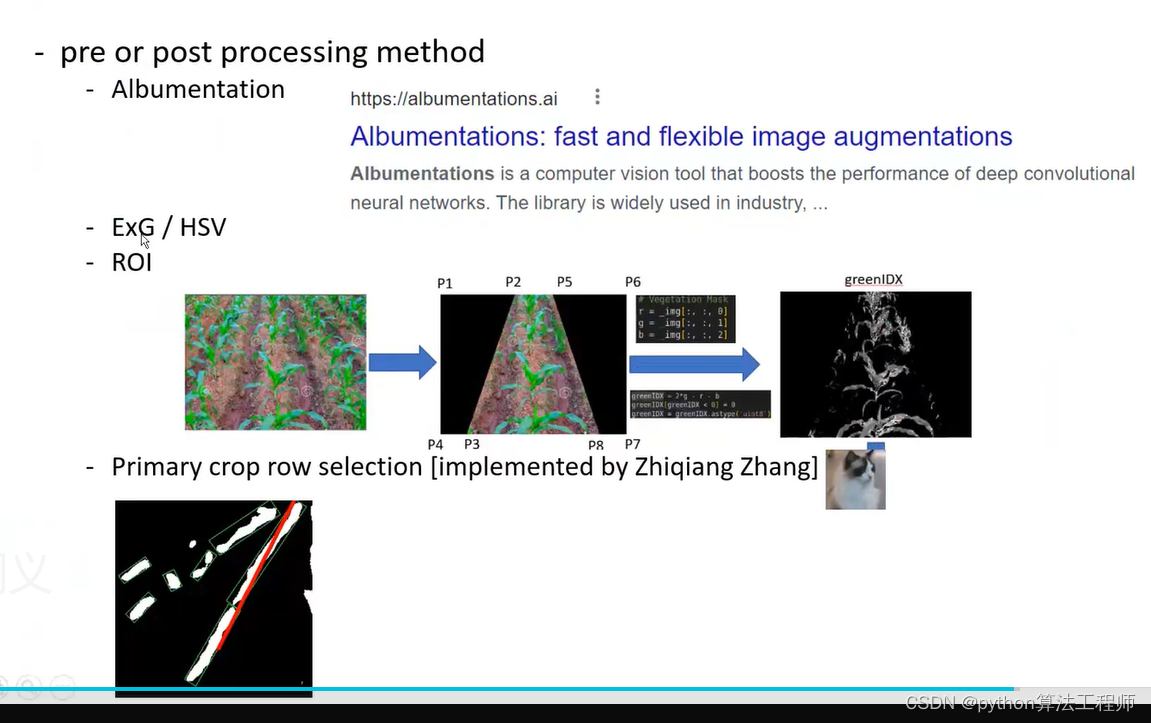
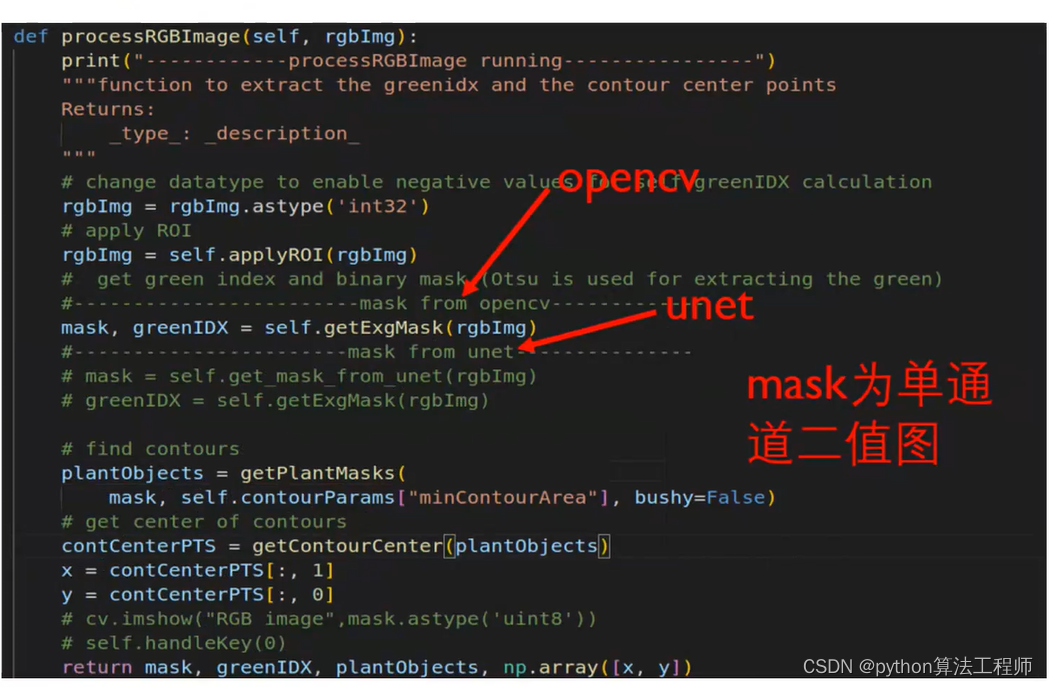
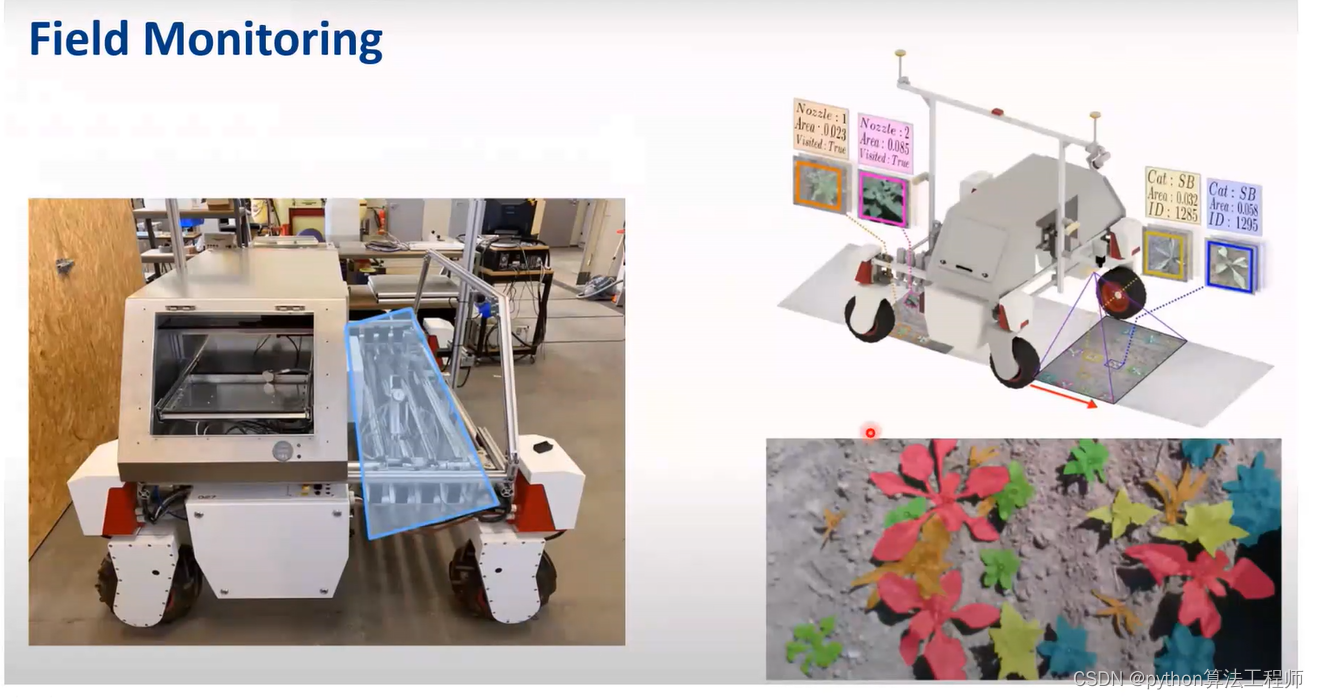
统计像素 分辨前景背景 绿色是我们比较关注的
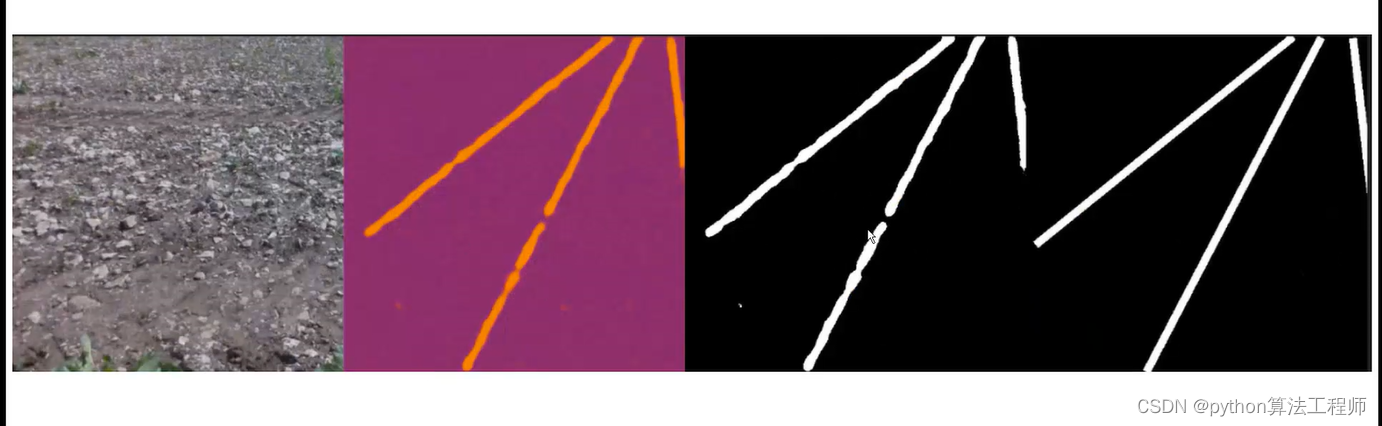
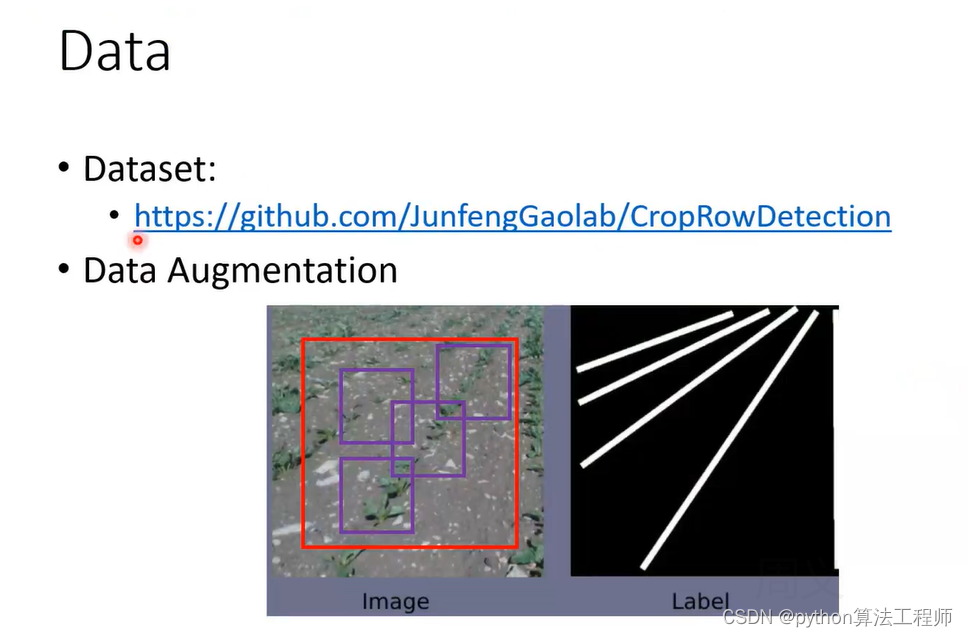
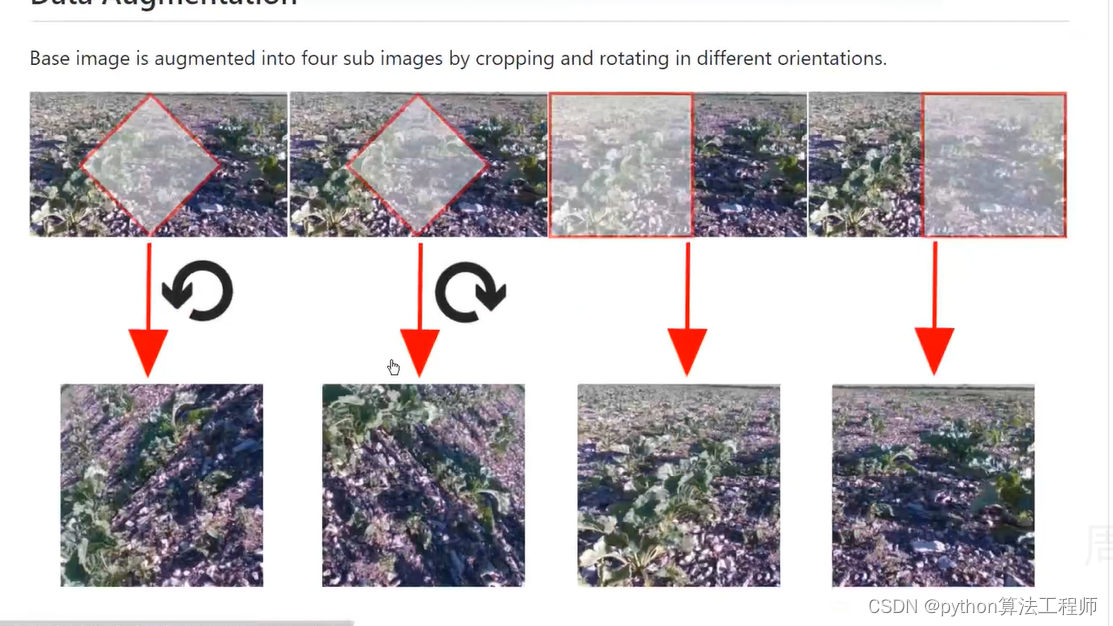
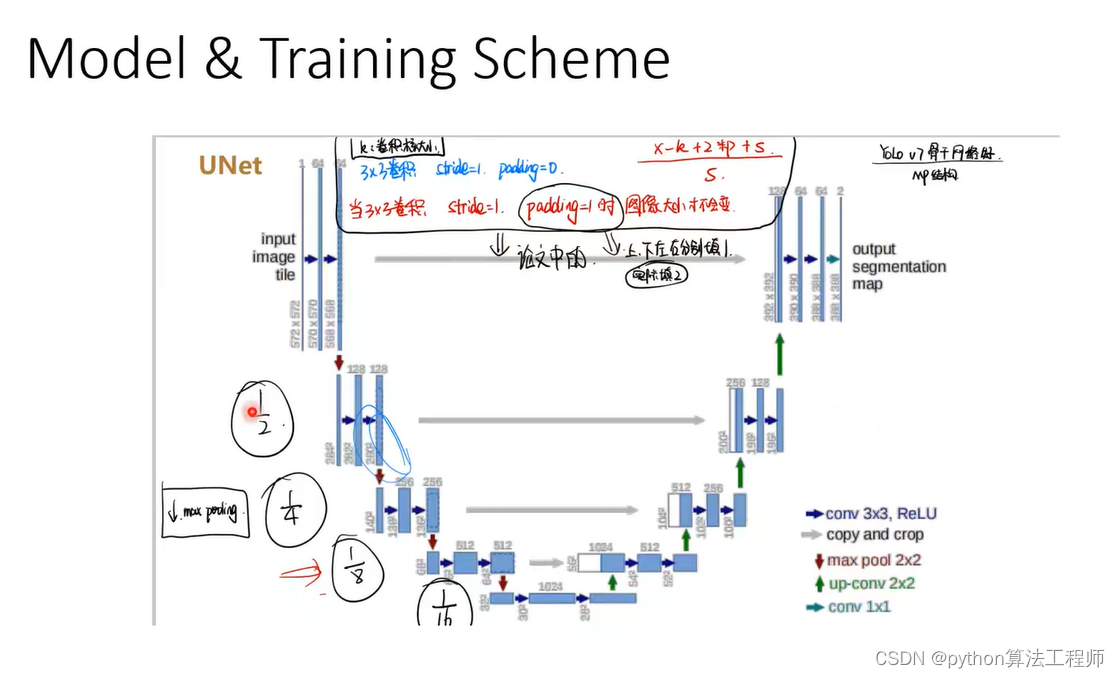
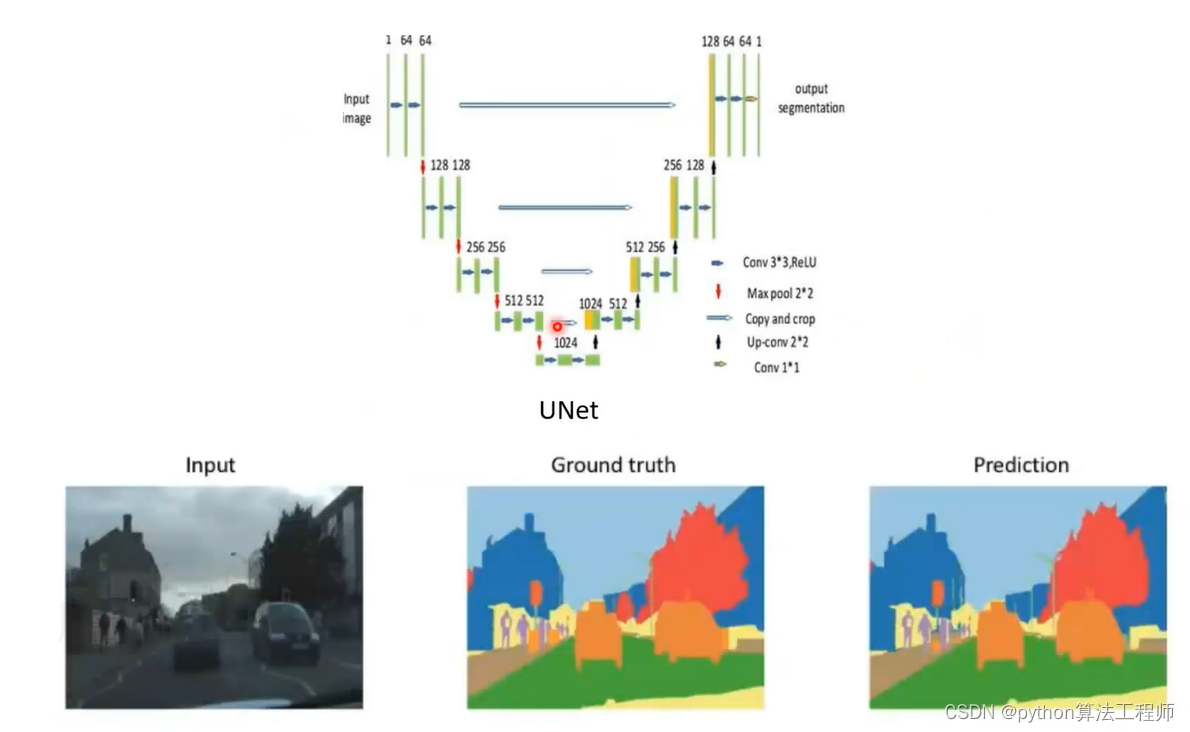 unet做图像分割
unet做图像分割
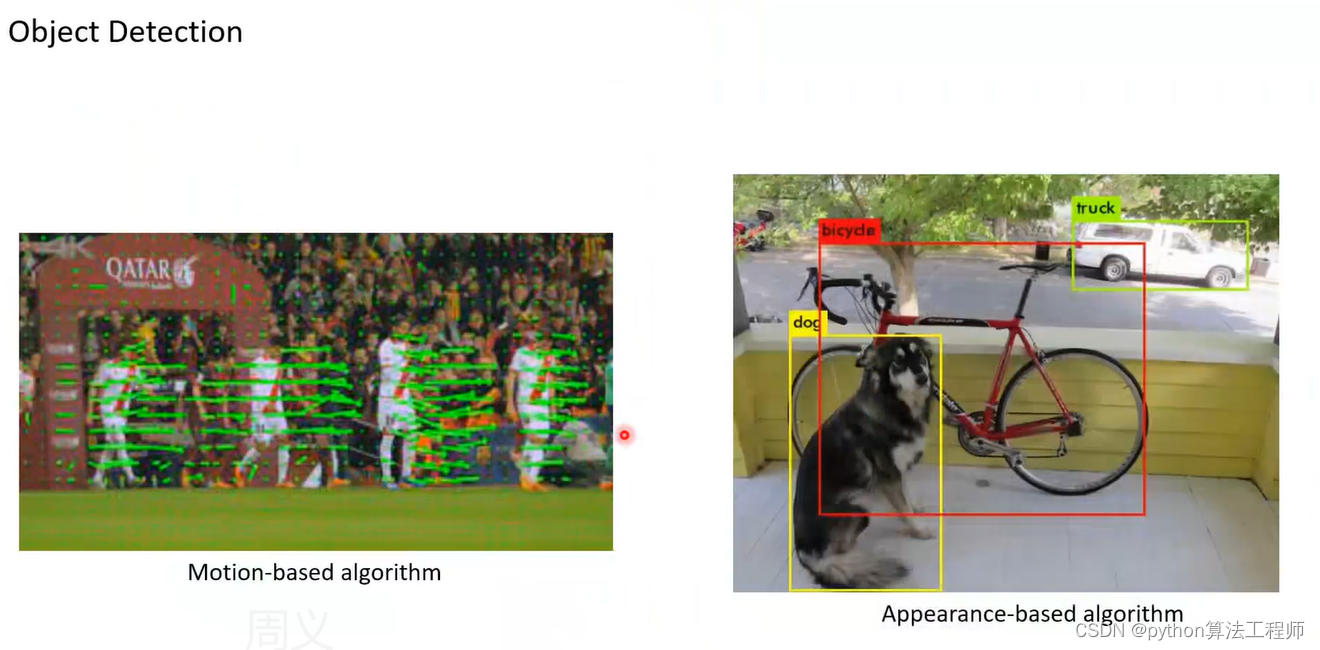
运动比较剧烈的是前景
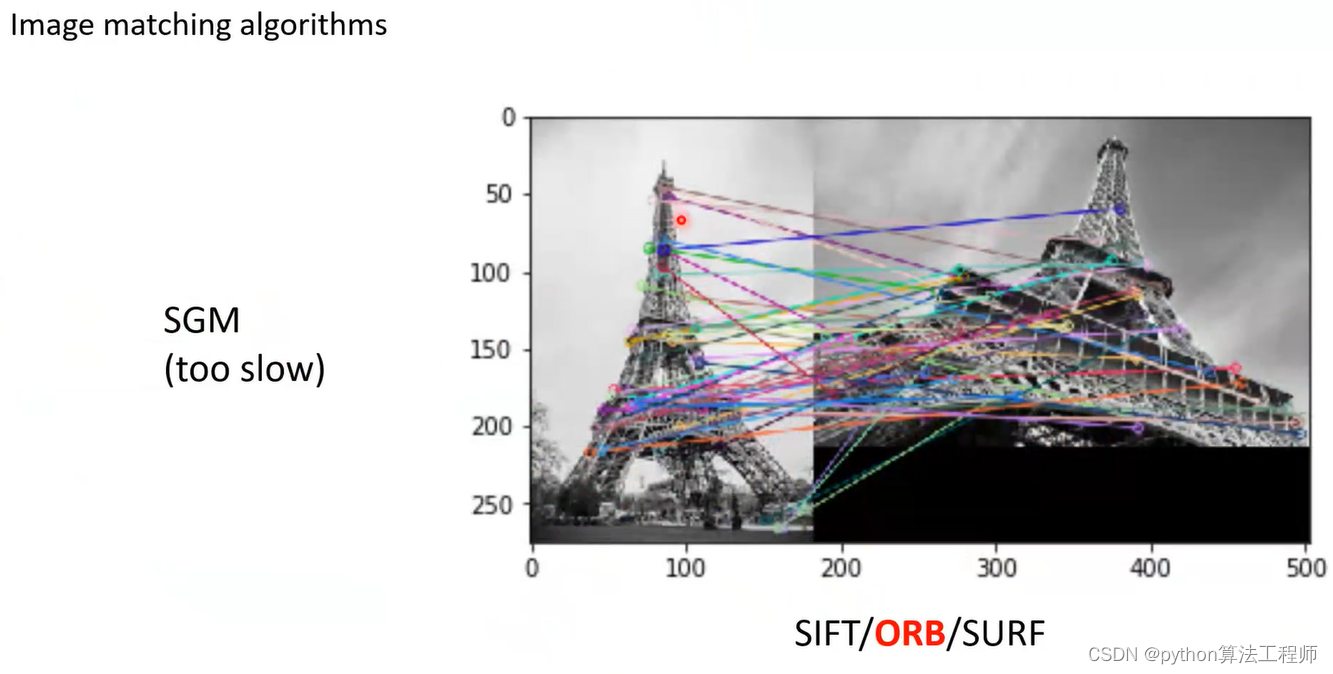 特征点匹配
特征点匹配

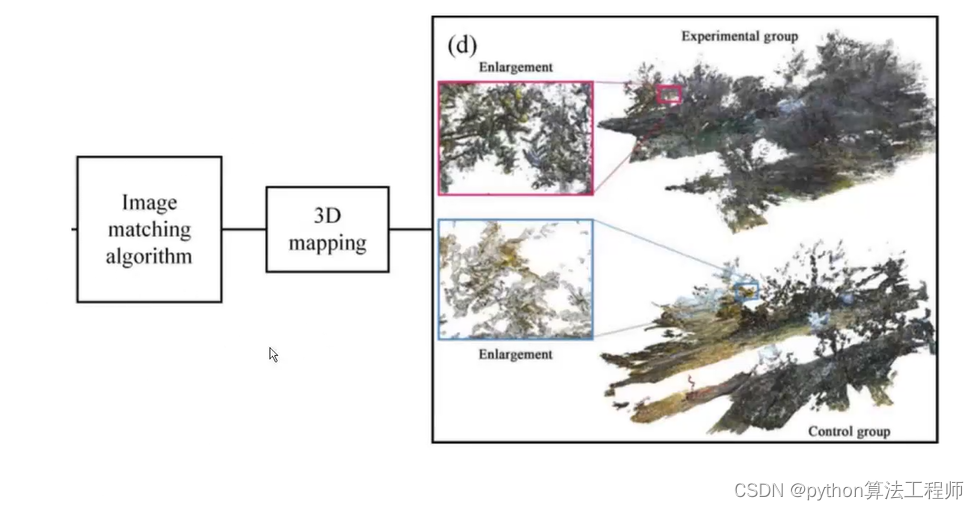
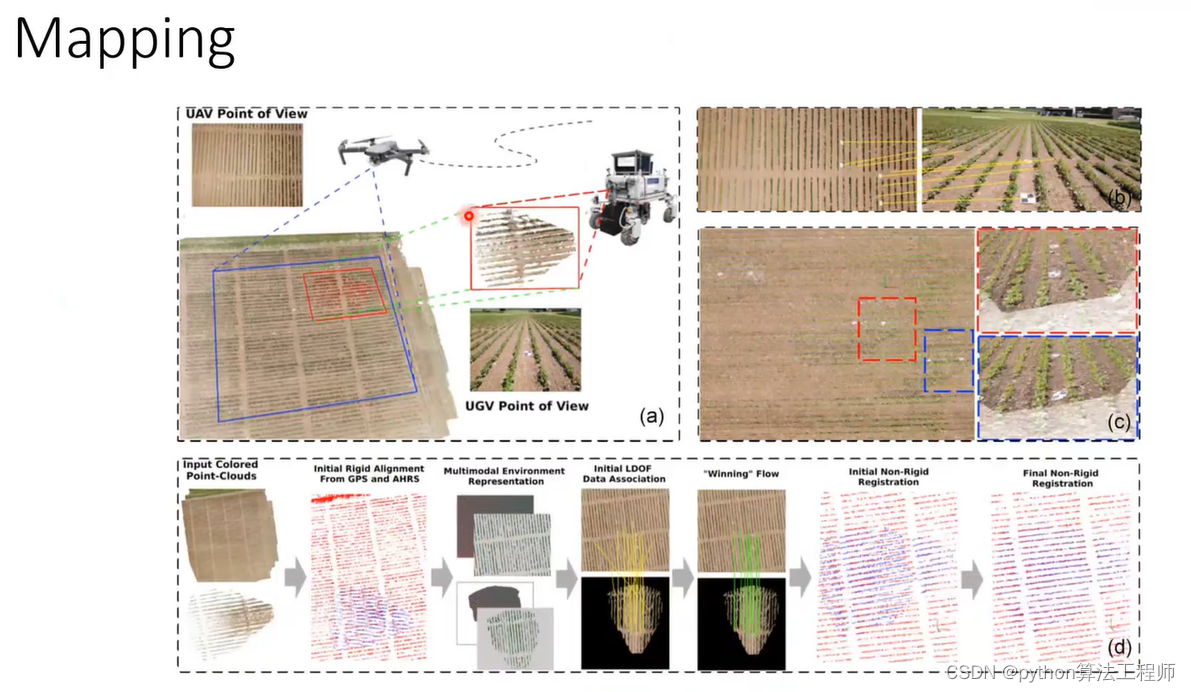
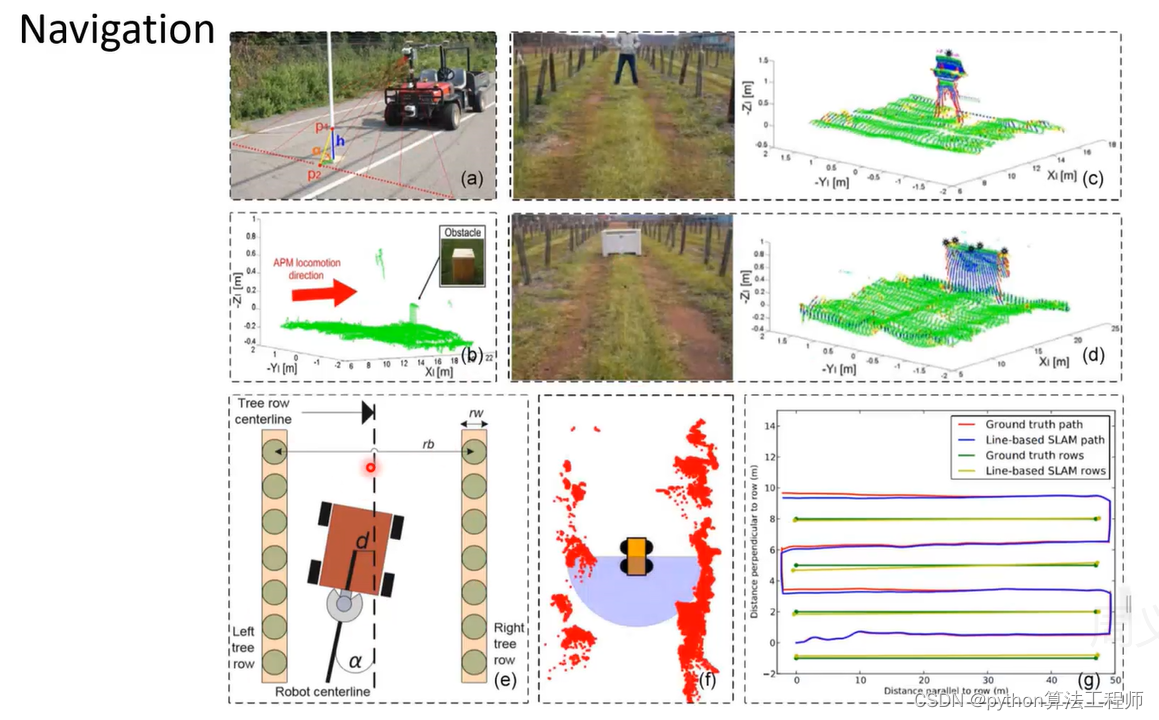
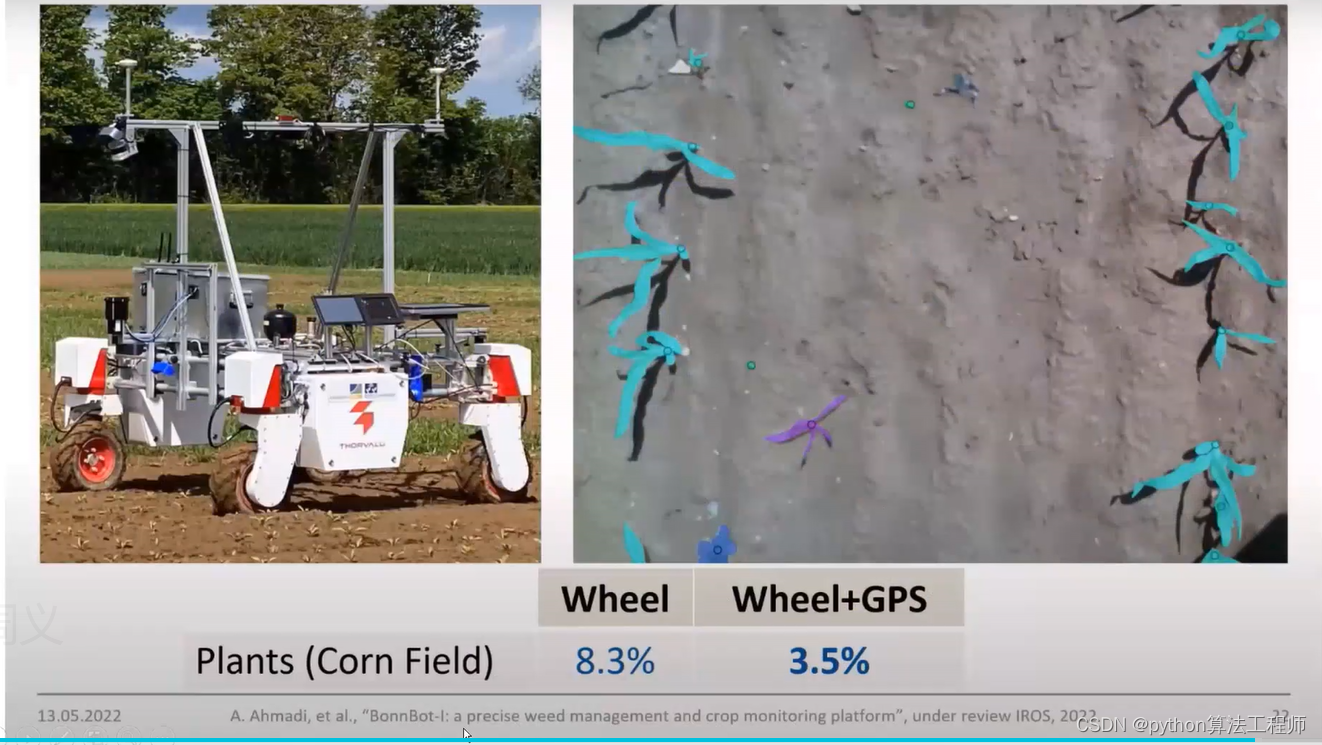
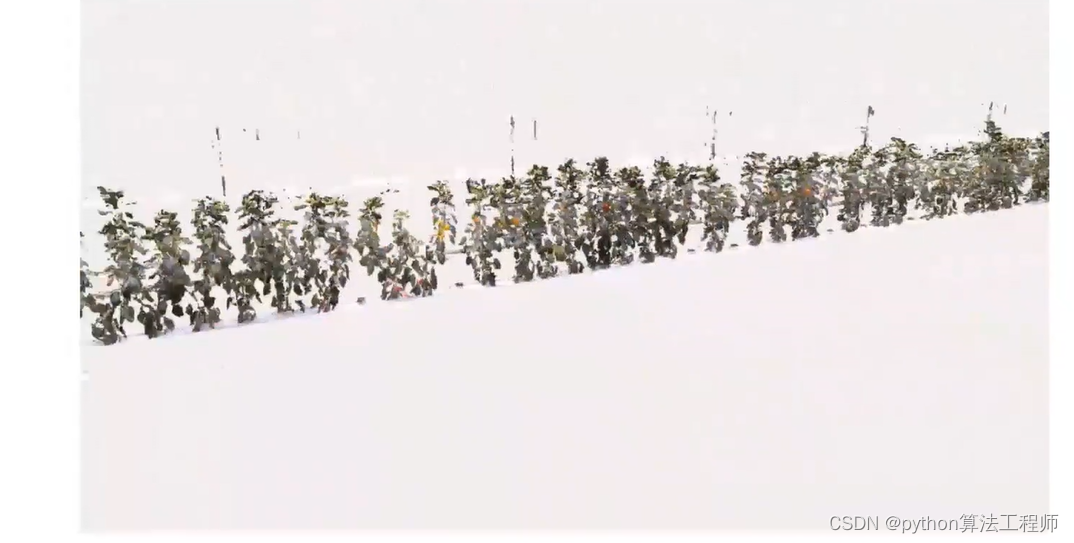
大豆农田点云建图
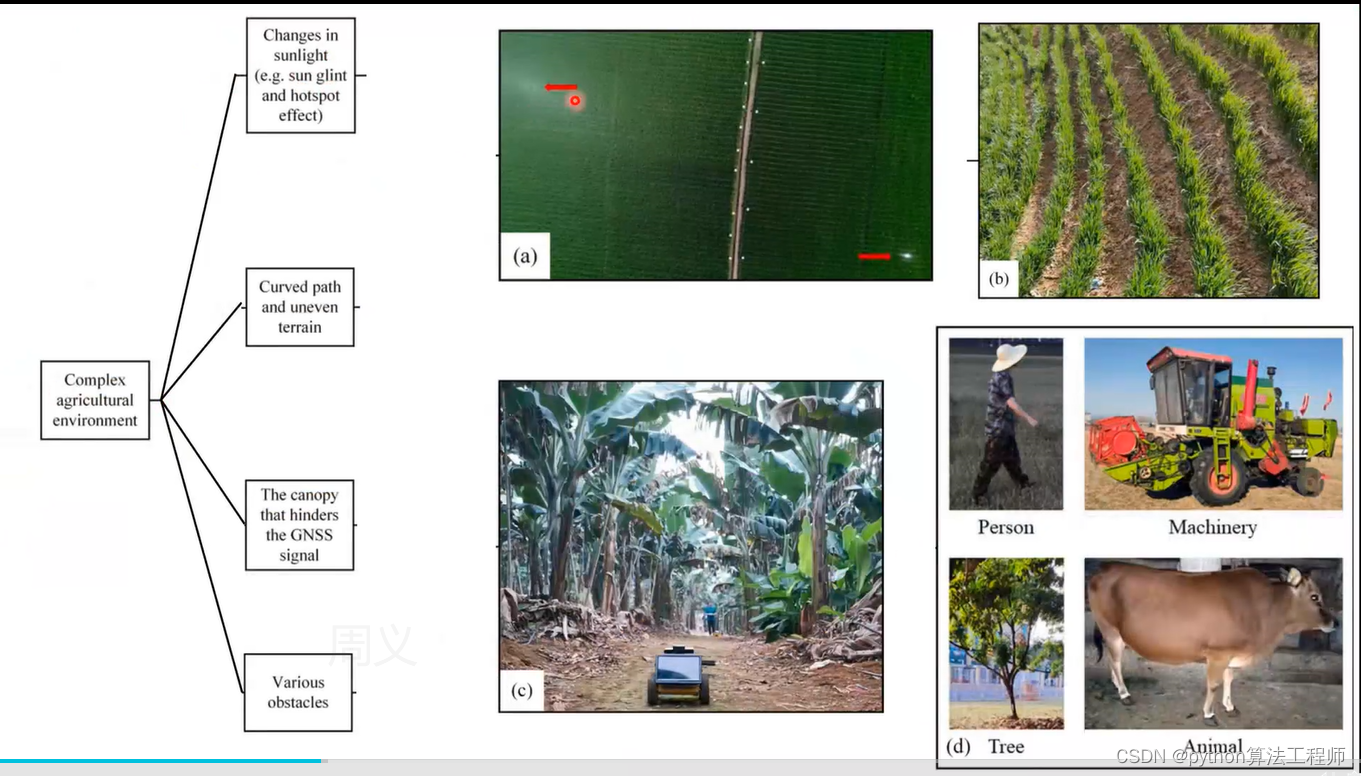
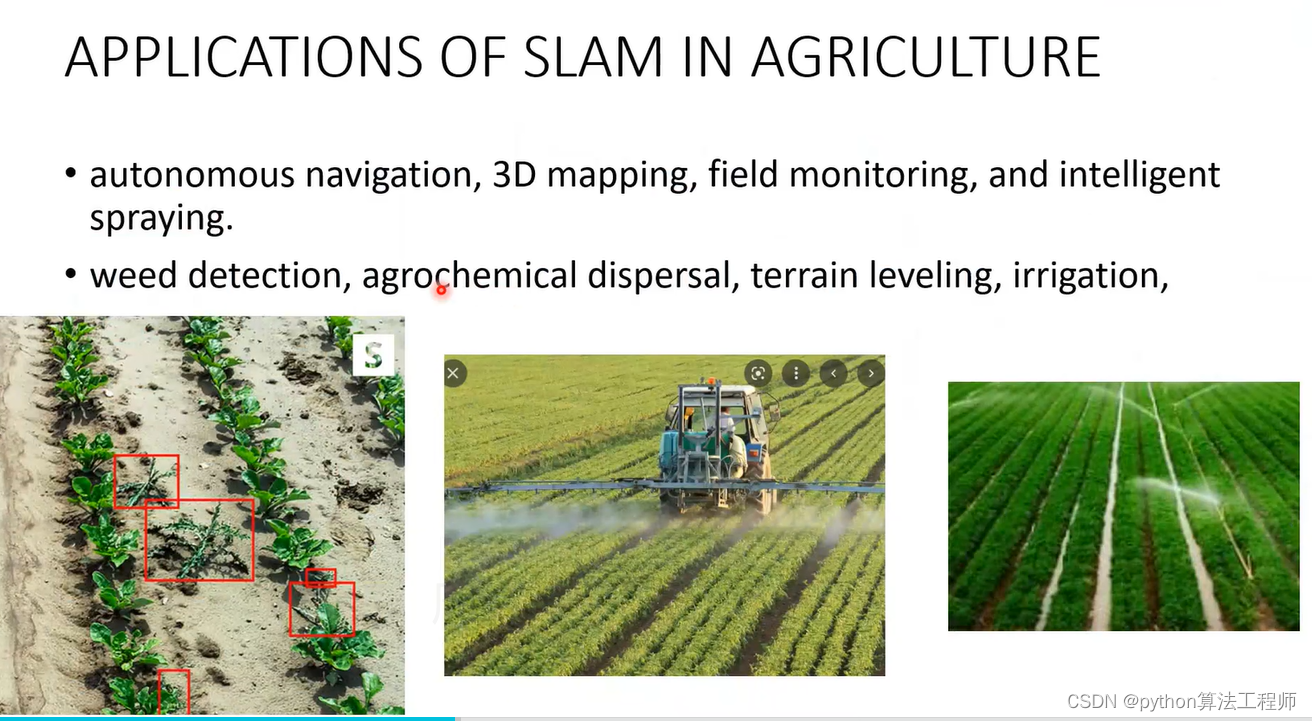
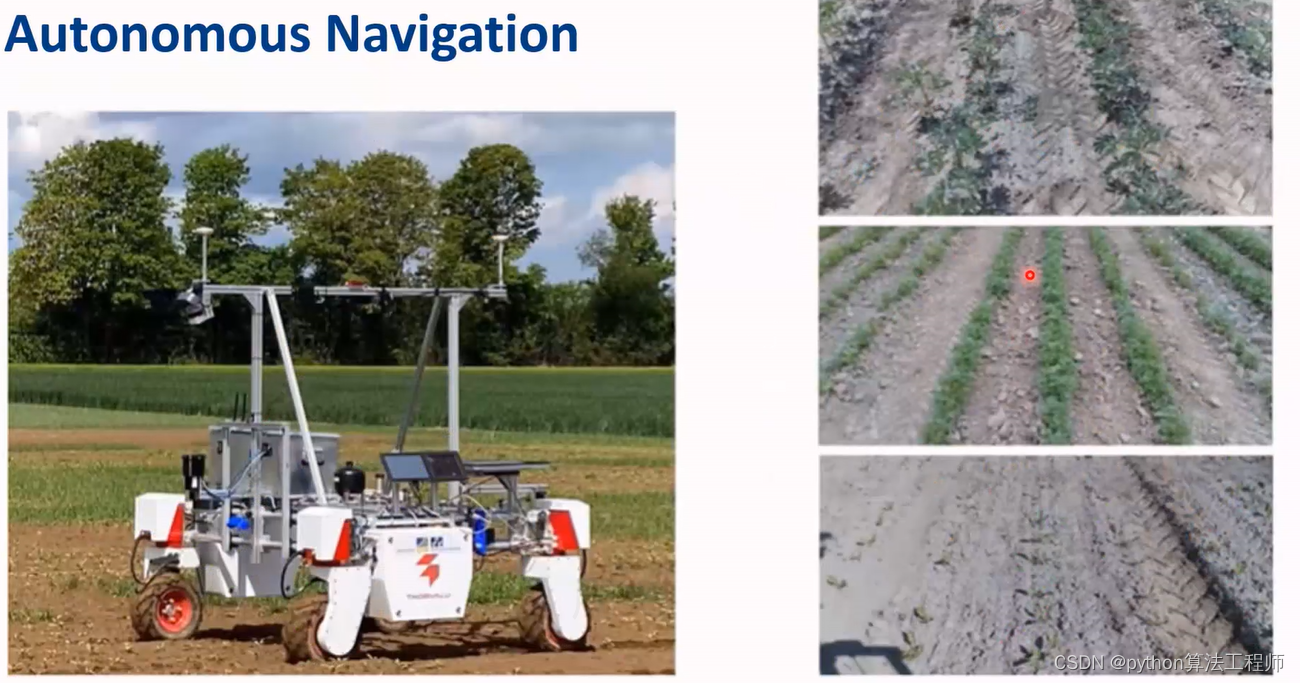
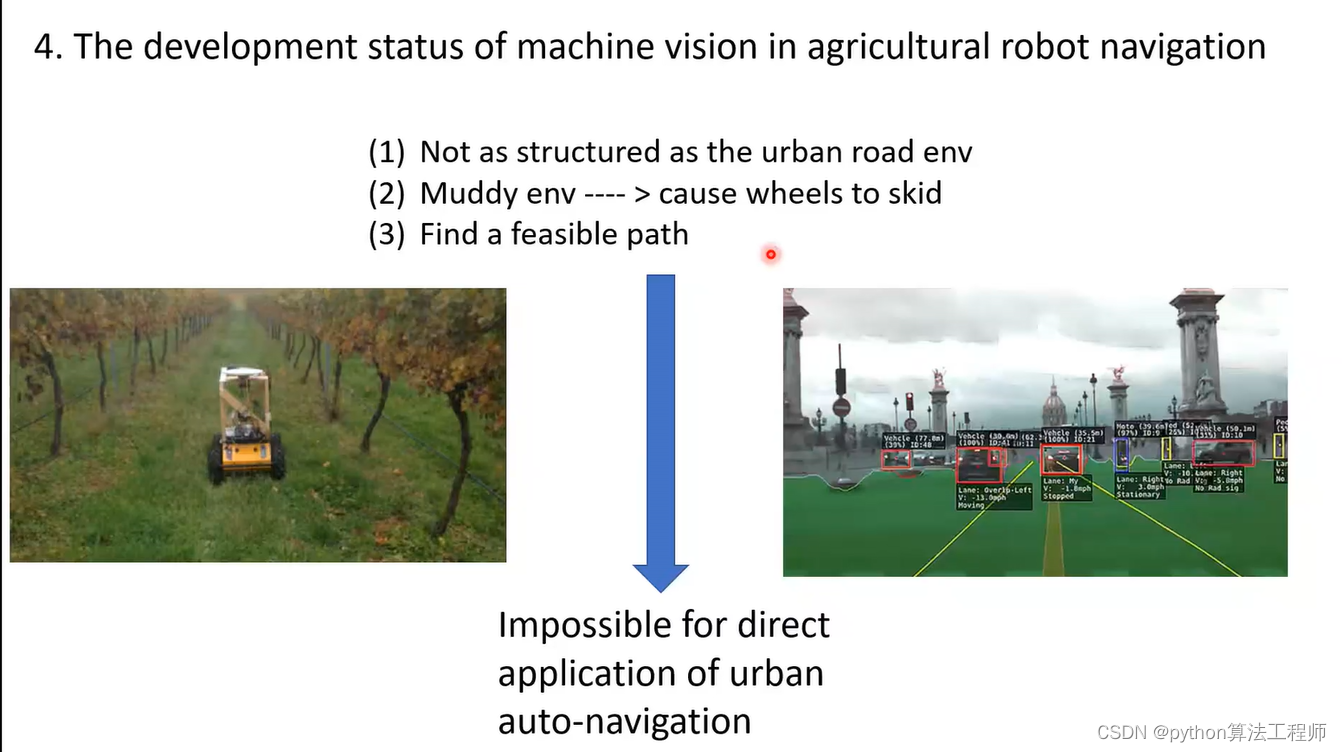 农田路况复杂
农田路况复杂

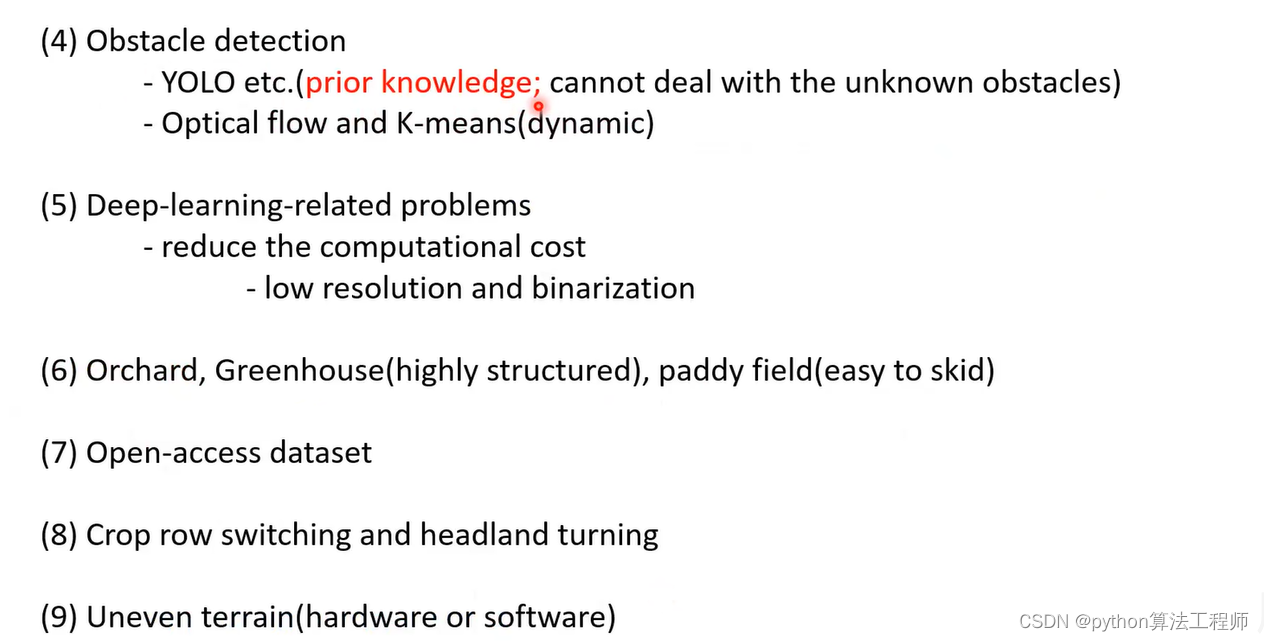 光流计算量比较大,可以捕捉运动比较大的物体
光流计算量比较大,可以捕捉运动比较大的物体

分割检测,红色是我们关心的,红色杂草清除
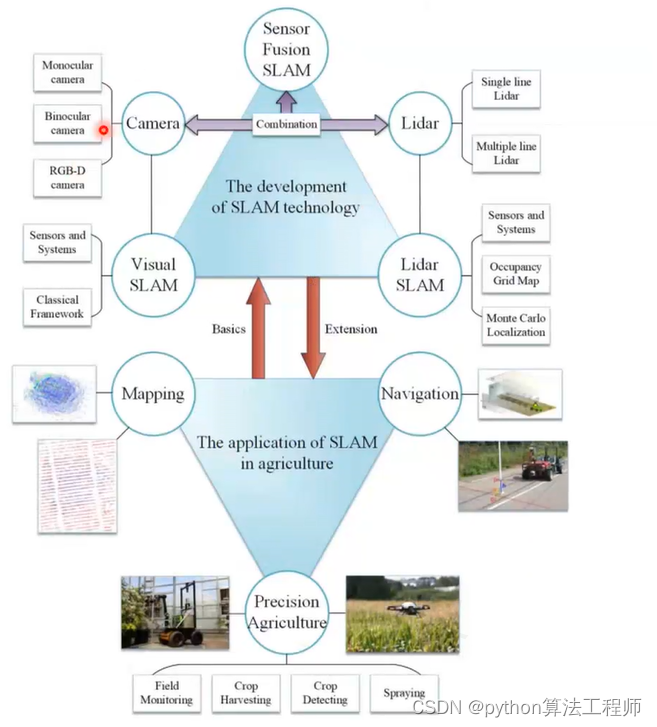 视觉slam 雷达slam
视觉slam 雷达slam
回环检测
农田地图匹配
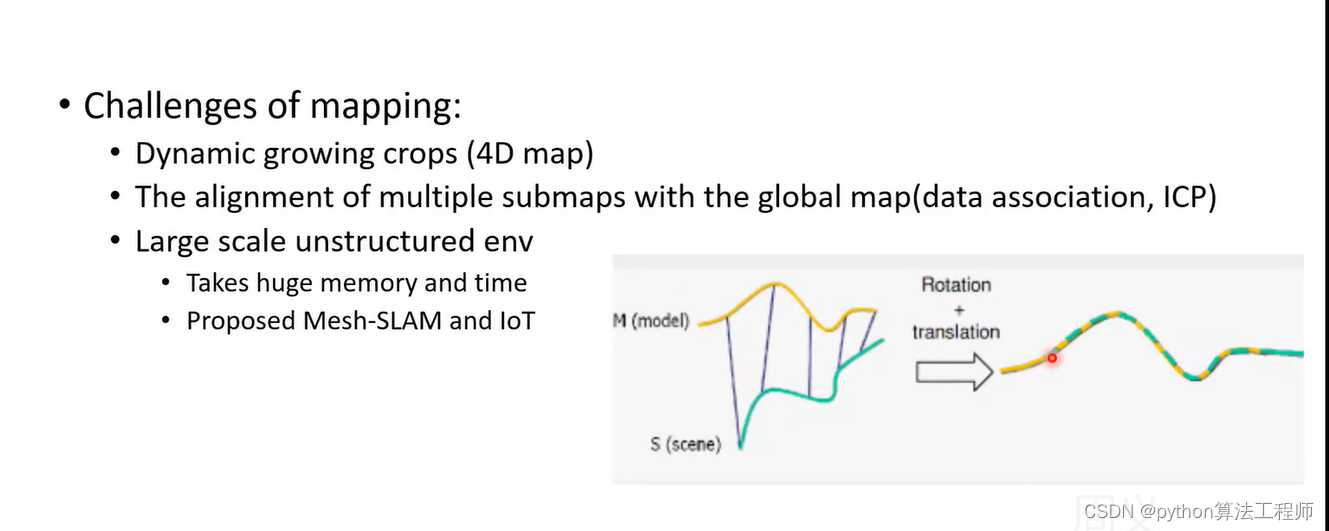
 内存有限
内存有限
农田一样

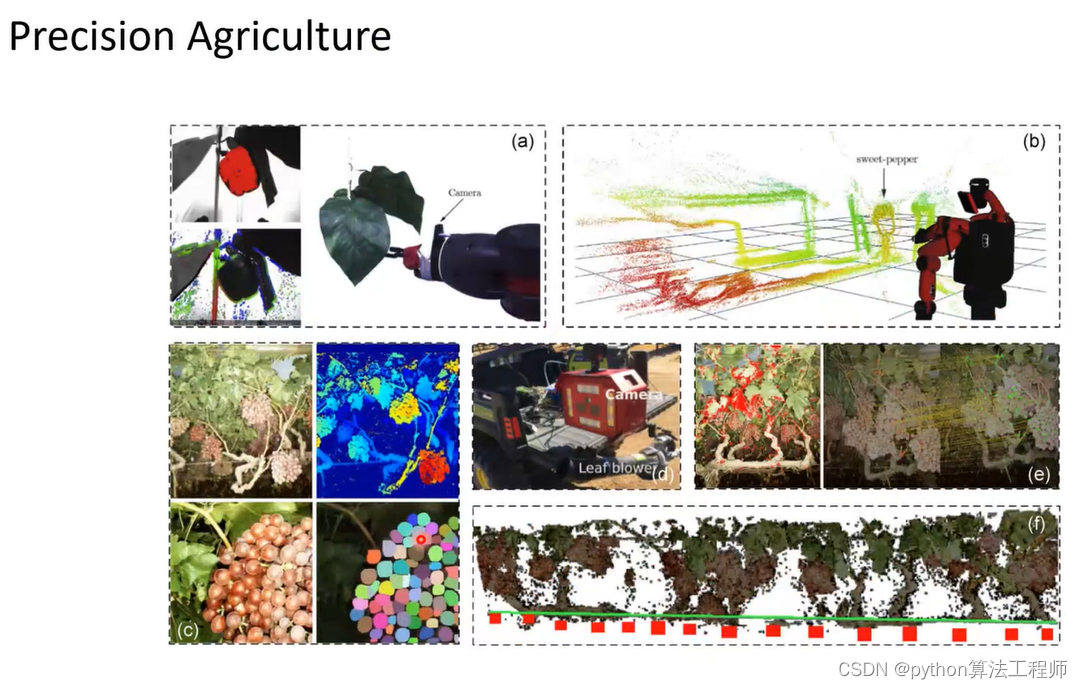
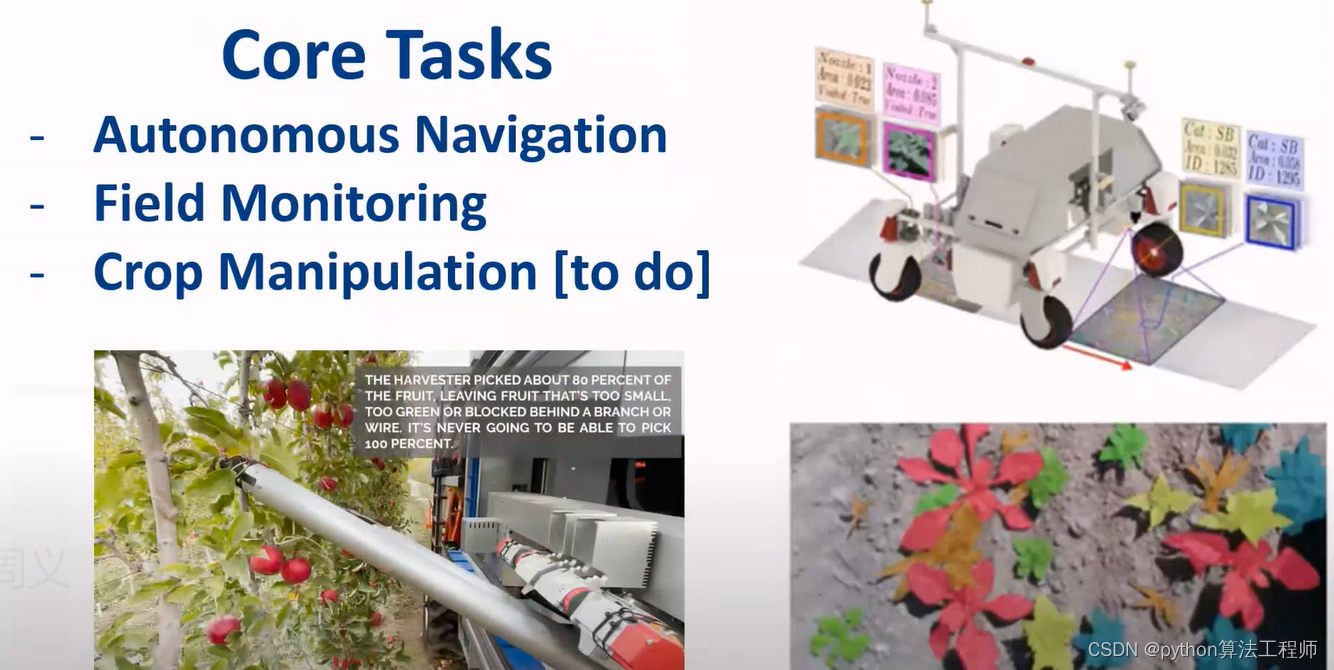 采摘苹果
采摘苹果
 转换颜色空间,只关注绿色的部分
转换颜色空间,只关注绿色的部分
 传统的视觉方法比较稳定
传统的视觉方法比较稳定
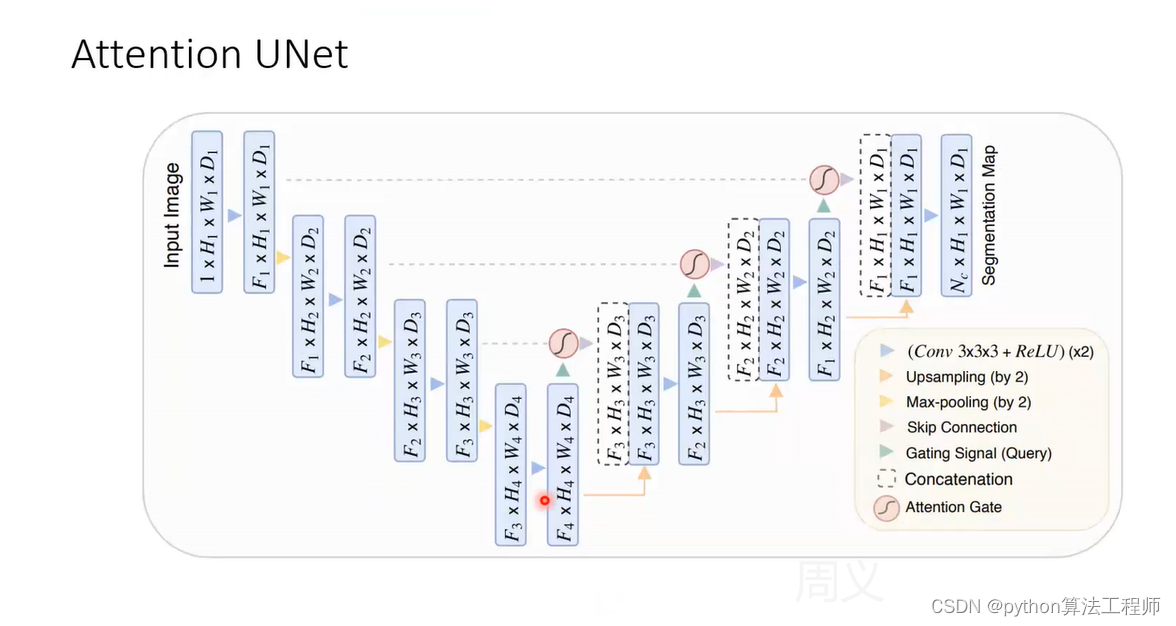
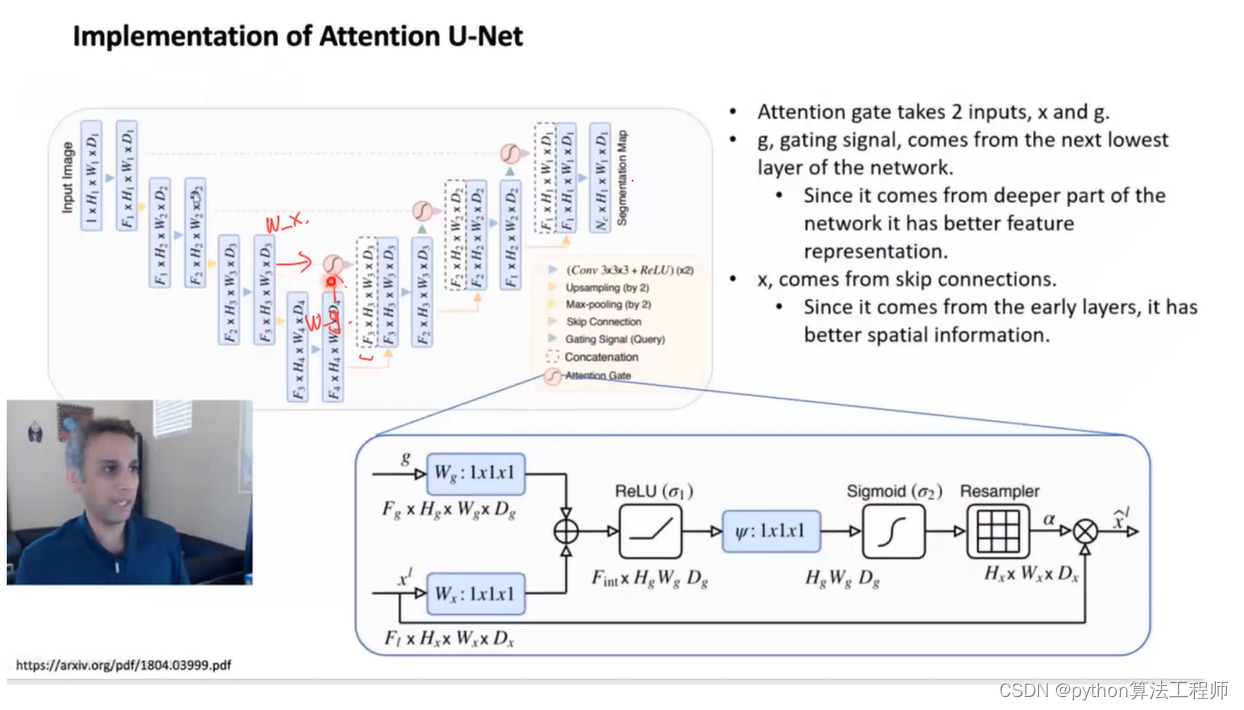
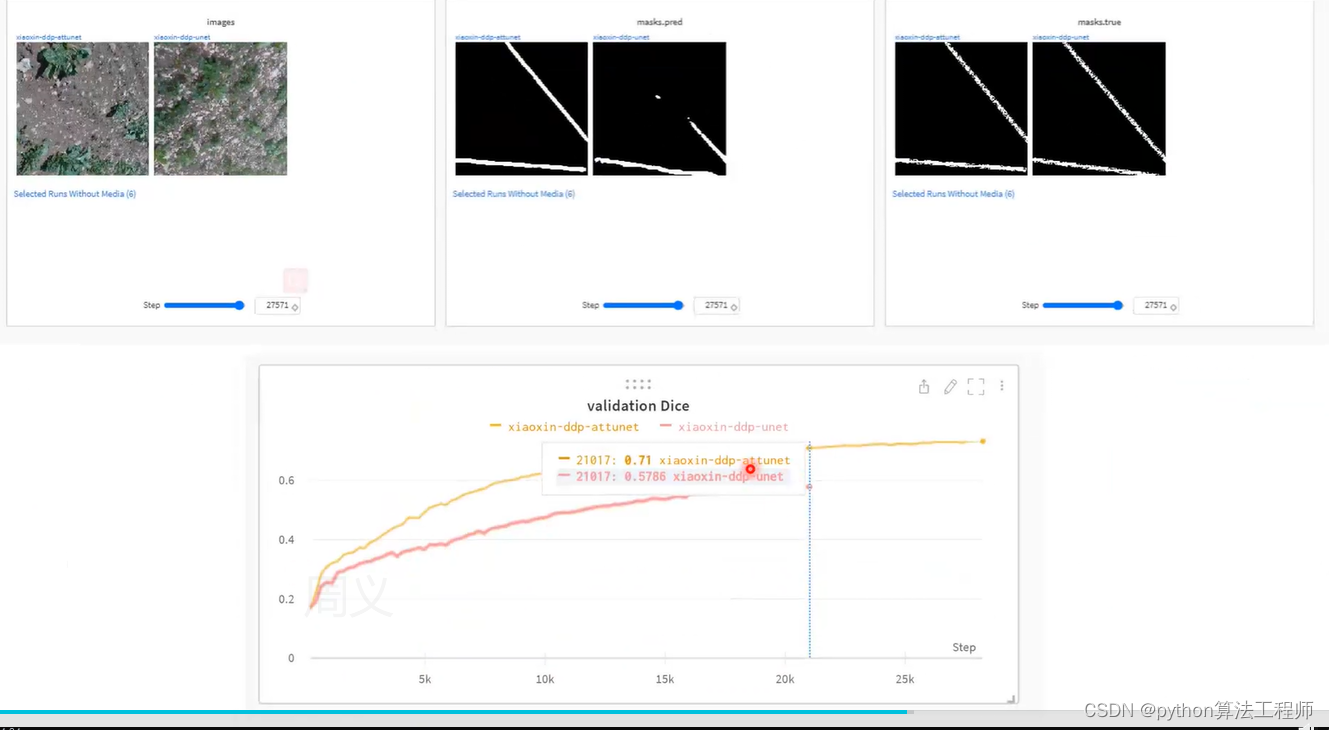
添加注意力机制后反传的梯度会更加的大
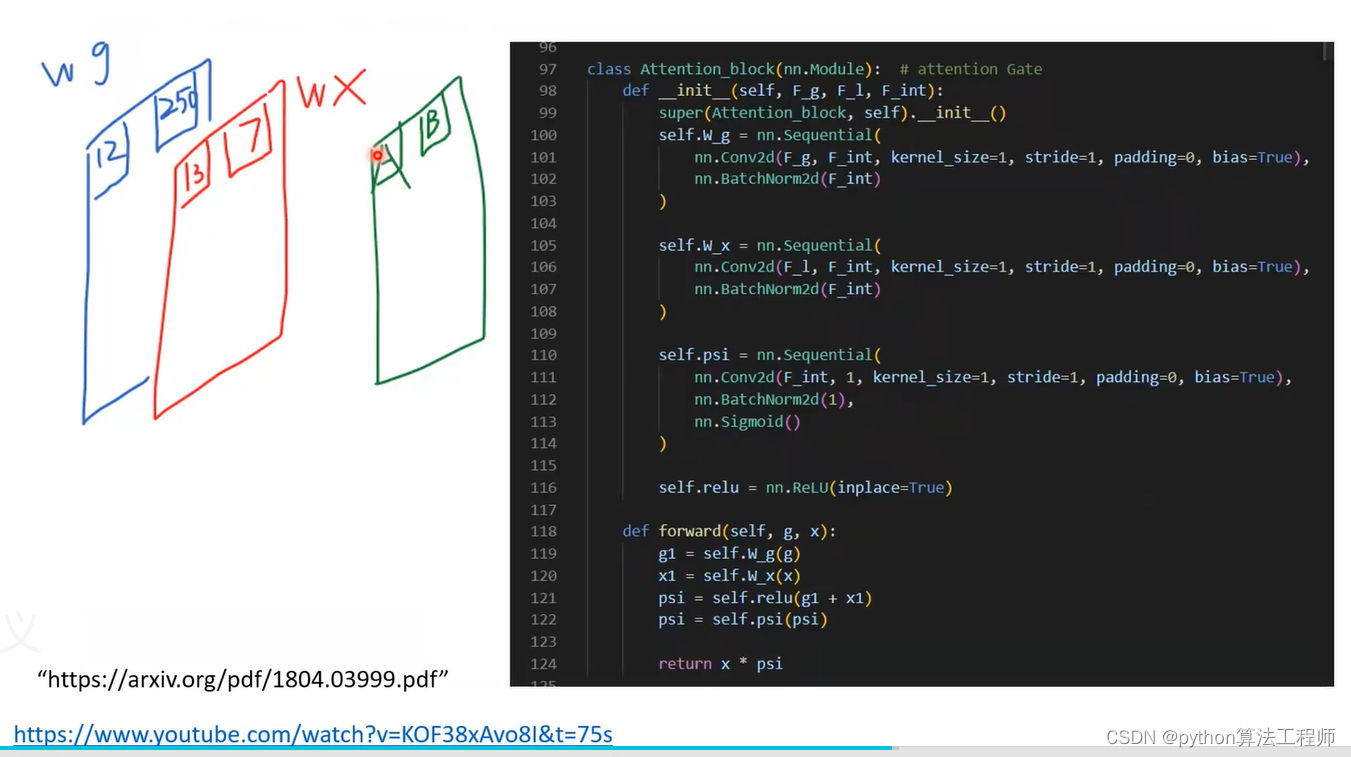
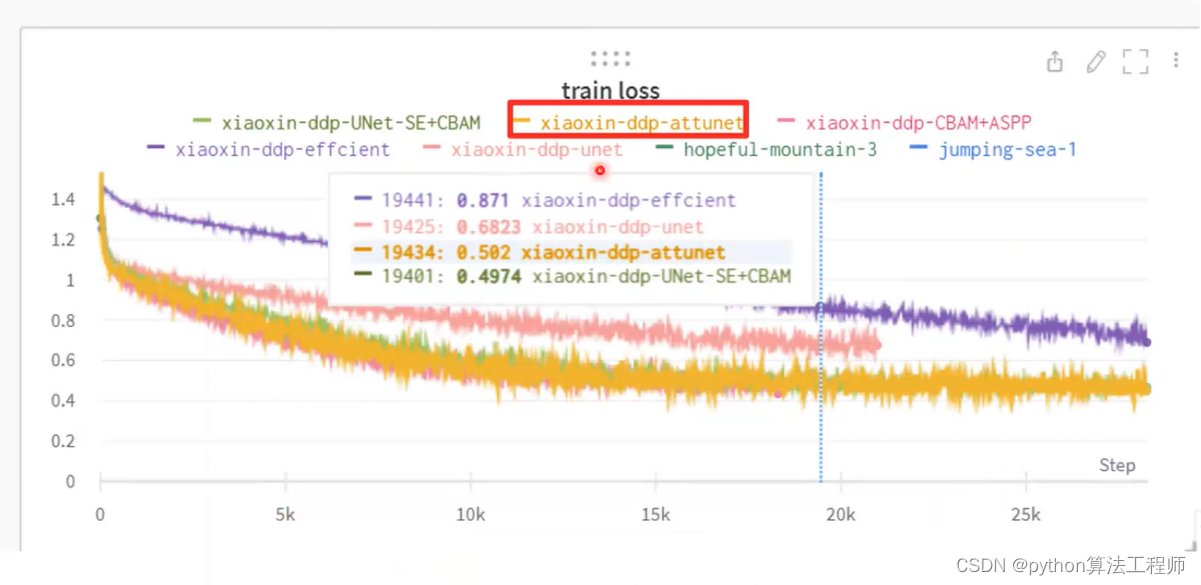
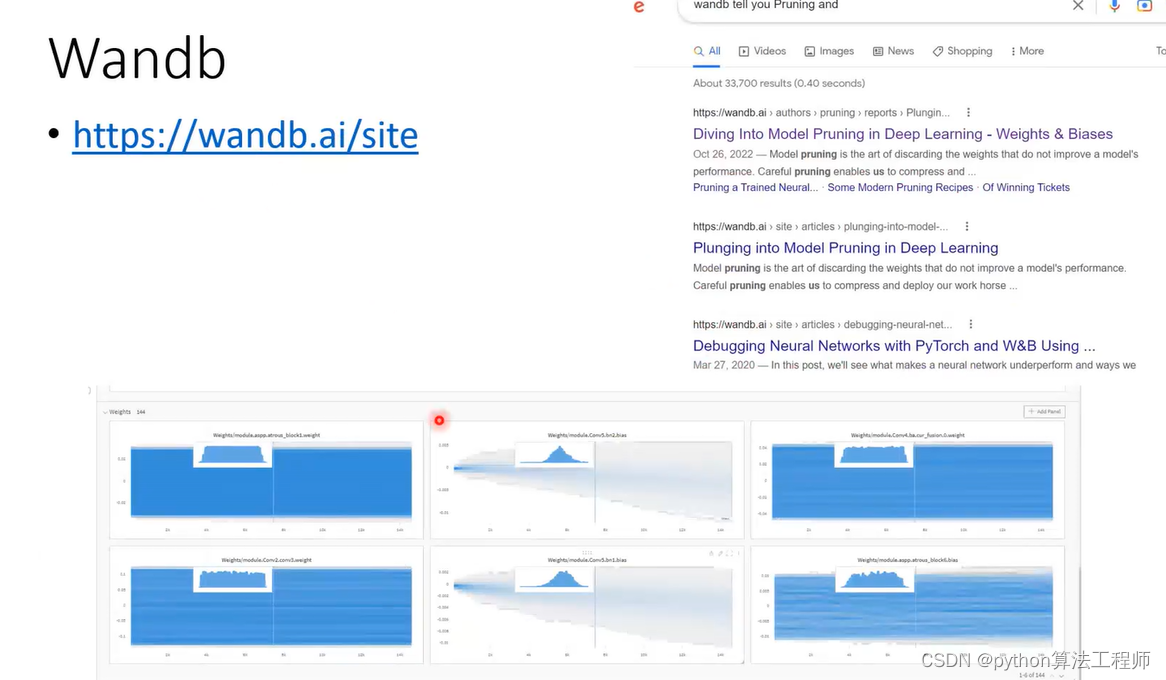
让训练过程更加可视化
如何通过wangdb进行剪枝和蒸馏
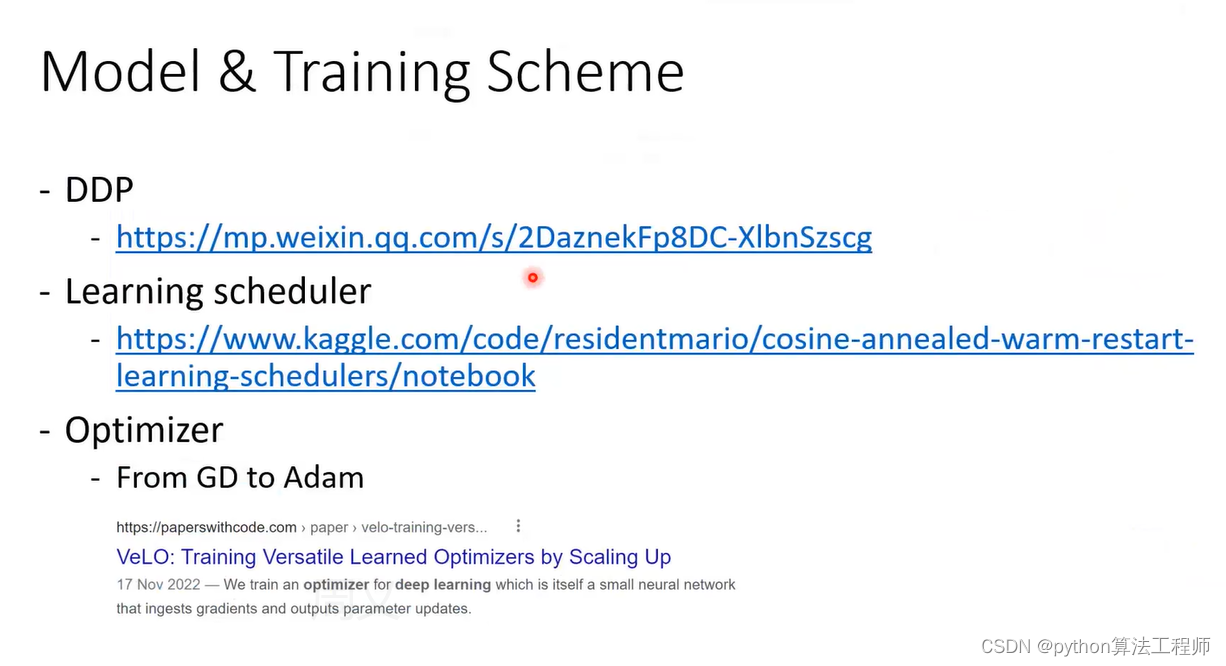
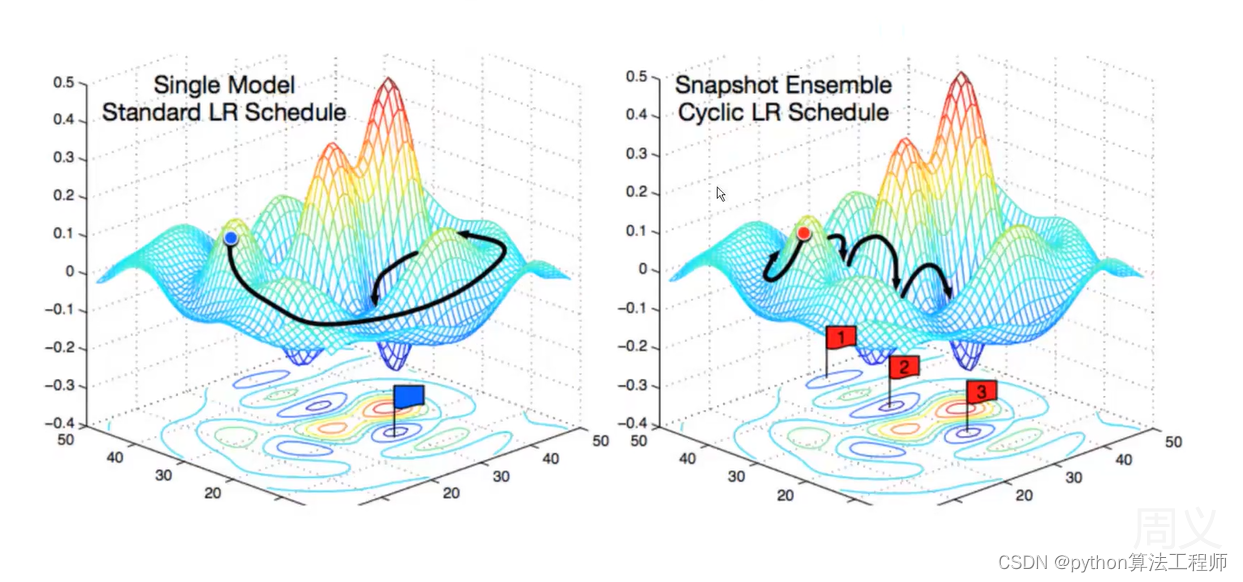
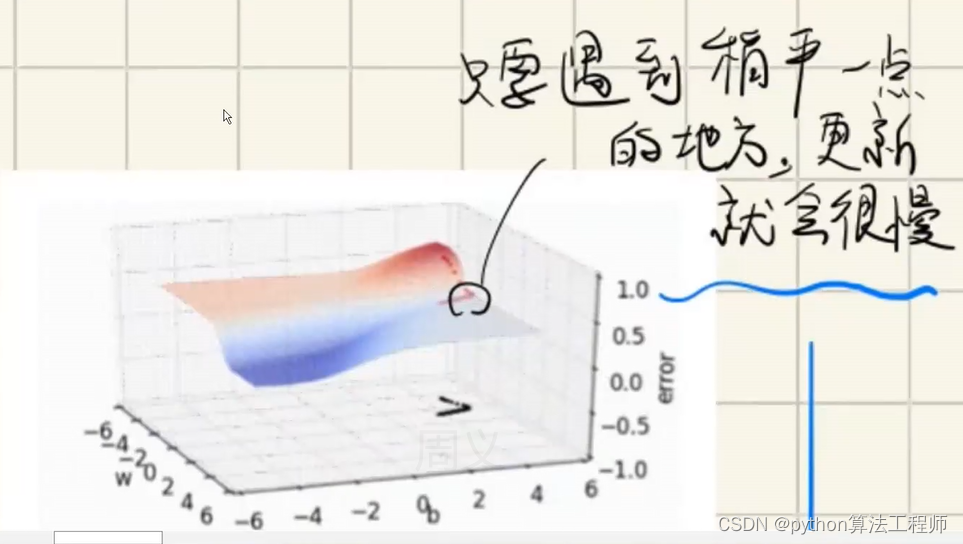
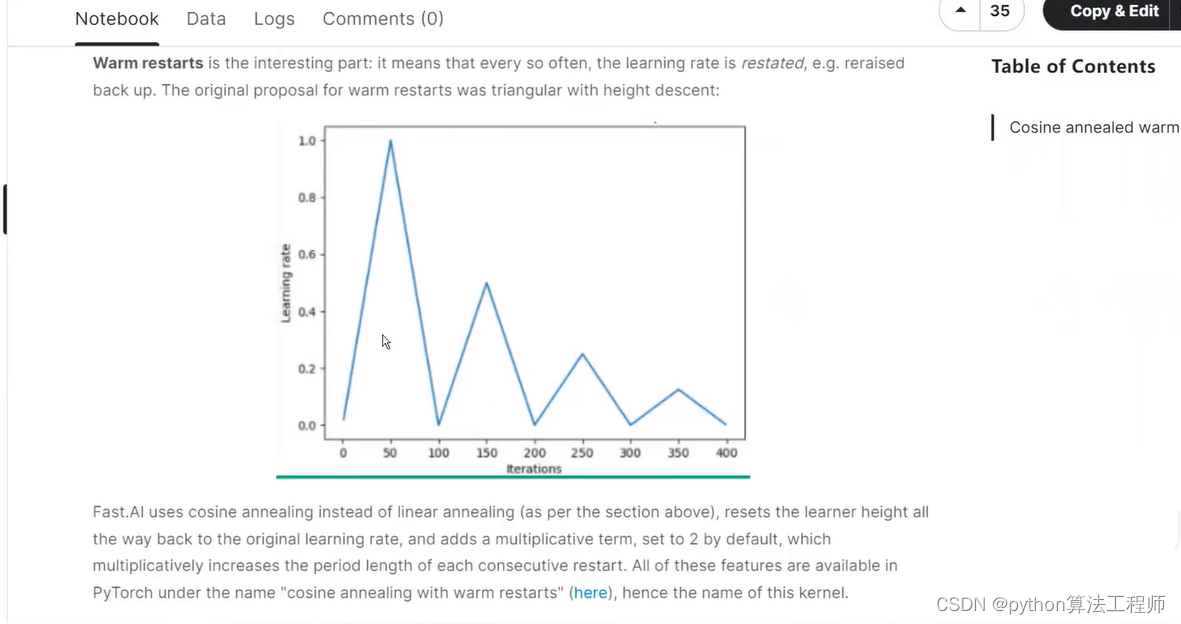 退火算法不会陷入局部最优
退火算法不会陷入局部最优
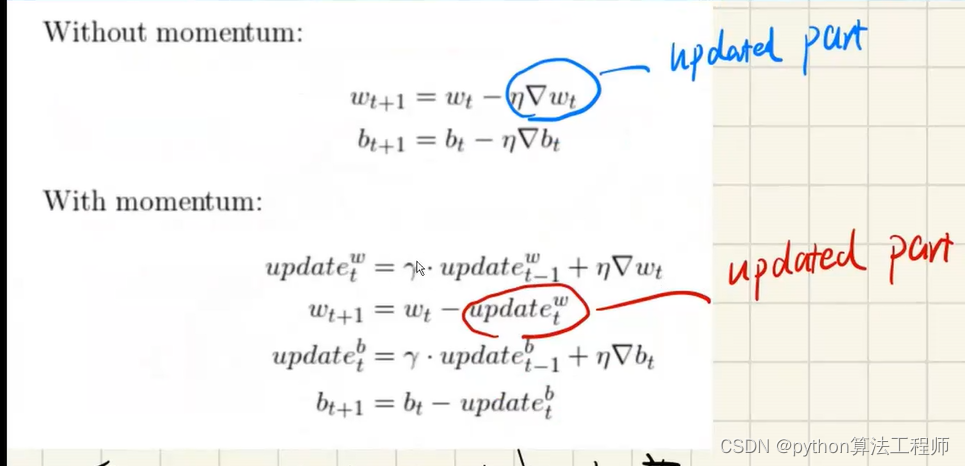
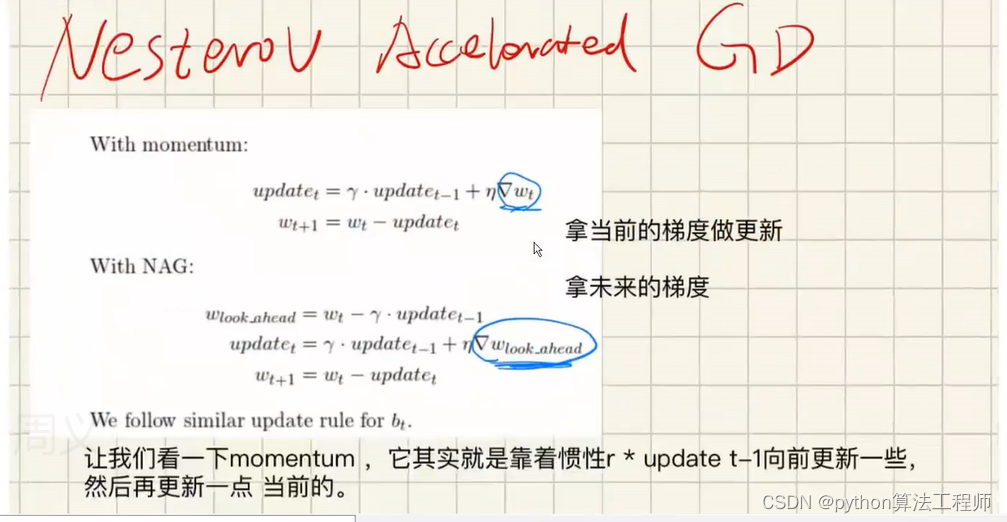
 添加一个惯性,也就是动量
添加一个惯性,也就是动量
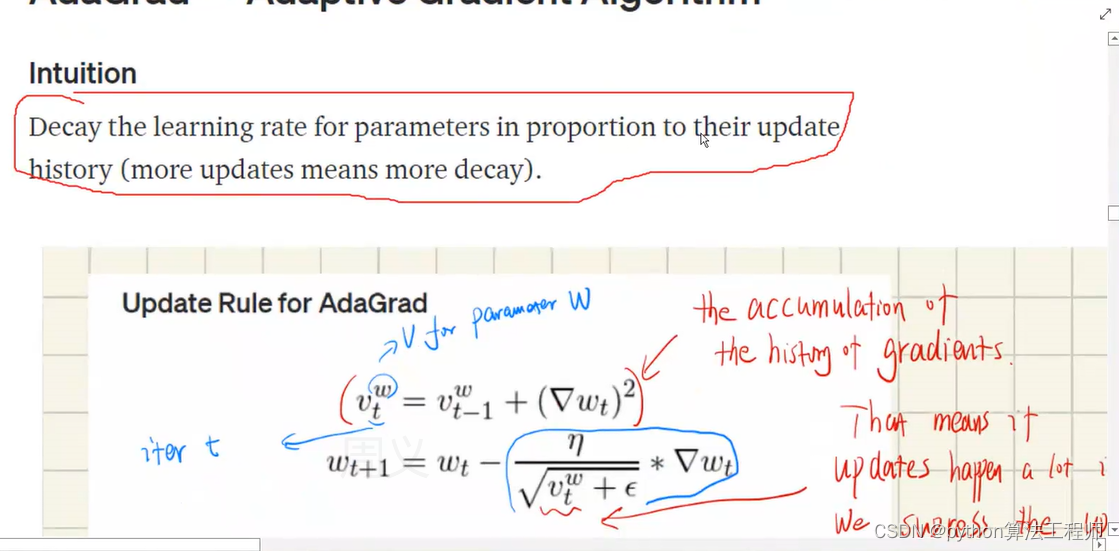
 自适应学习率
自适应学习率

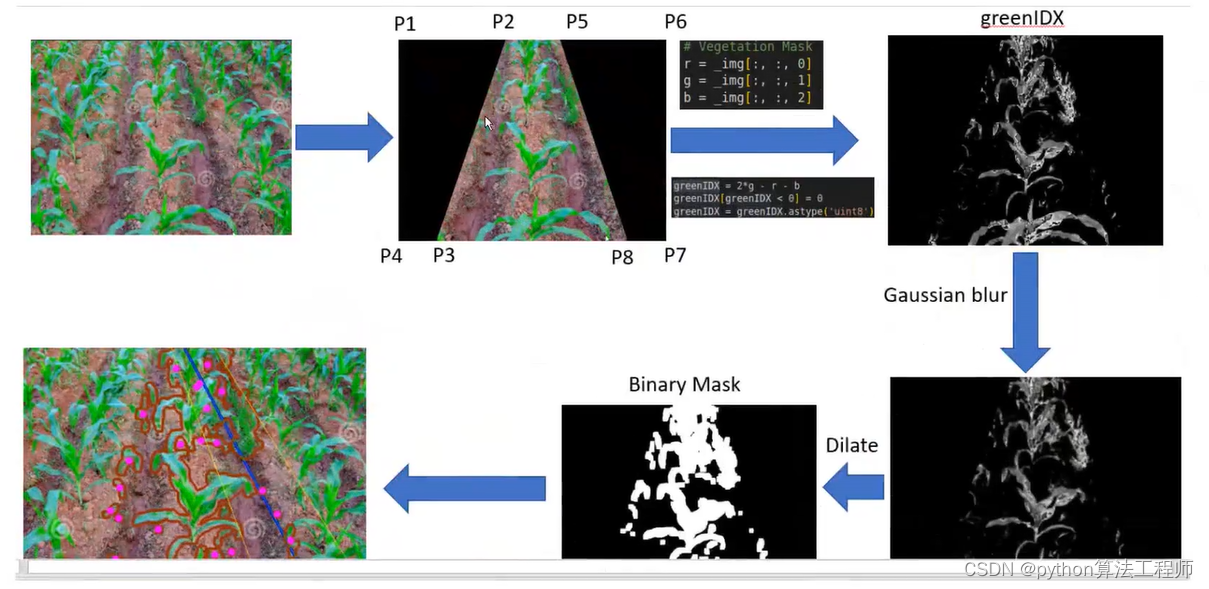
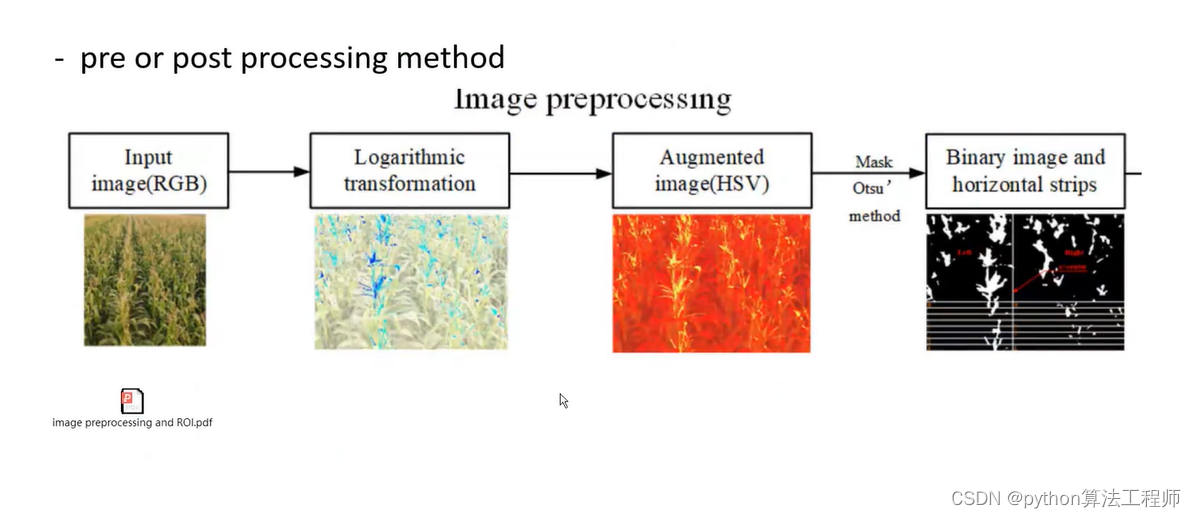
前处理
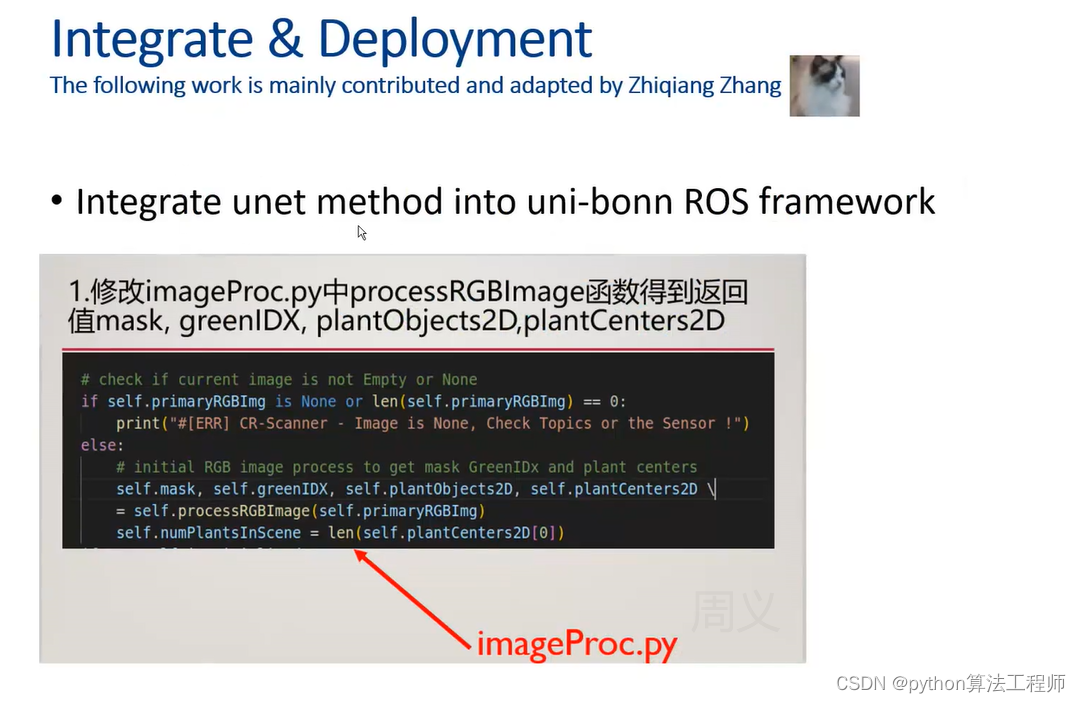
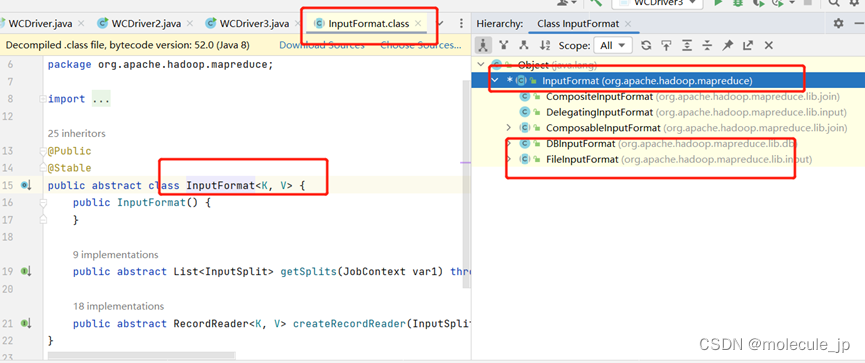
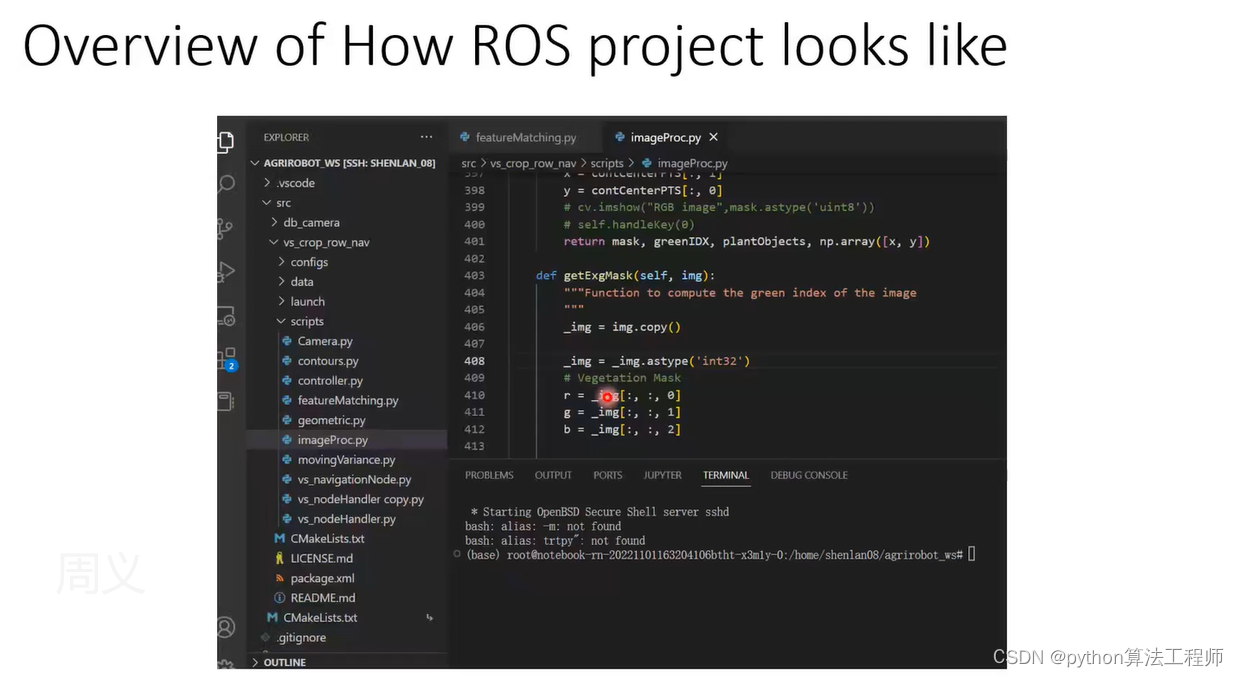
将unet集成到伯恩大学的ros框架下
将 UNet 模型集成到伯恩大学的 ROS 框架下,需要进行以下步骤:
-
准备 UNet 模型:首先需要准备好训练好的 UNet 模型,并将其保存为 ONNX 格式或 TensorFlow 格式。
-
安装 ROS:ROS 是一个用于机器人开发的开源框架,需要先在计算机上安装 ROS。
-
安装 ROS packages:安装 ROS packages,可以使用 ROS 提供的工具
rosdep进行安装。例如,要安装 ROS 中的cv_bridgepackage,可以执行以下命令:sudo apt-get install ros-<distro>-cv-bridge ``` 其中 `<distro>` 是 ROS 的发行版,例如 `melodic` 或 `noetic`。 -
创建 ROS package:使用 ROS 提供的工具
catkin_create_pkg创建 ROS package,例如:catkin_create_pkg unet_ros rospy roscpp std_msgs sensor_msgs cv_bridge ``` 这将创建一个名为 `unet_ros` 的 ROS package,并添加了一些依赖项。 -
编写 ROS 节点:在 ROS package 中创建一个 ROS 节点,用于加载 UNet 模型并执行推理操作。可以使用 ROS 提供的 Python 或 C++ API 编写 ROS 节点。例如,在 Python 中,可以使用
rospy和cv_bridgepackage 加载图像数据和模型,并使用onnxruntime或 TensorFlow 进行推理操作。示例代码如下:import rospy import cv2 from cv_bridge import CvBridge import onnxruntime as ort def main(): # Load UNet model model = ort.InferenceSession('unet.onnx') # Initialize ROS node rospy.init_node('unet_ros') # Create a CvBridge object bridge = CvBridge() # Subscribe to image topic image_sub = rospy.Subscriber('image', sensor_msgs.msg.Image, image_callback) # Spin ROS node rospy.spin() def image_callback(data): # Convert ROS image message to OpenCV image cv_image = bridge.imgmsg_to_cv2(data, 'bgr8') # Preprocess image # ... # Run UNet inference output = model.run(['output'], {'input': input}) # Postprocess output # ... # Publish result # ... if __name__ == '__main__': main() ``` -
运行 ROS 节点:在 ROS package 的根目录下执行以下命令,编译 ROS package 并运行 ROS 节点:
catkin_make source devel/setup.bash rosrun unet_ros unet_node ``` -
测试 ROS 节点:使用 ROS 提供的工具
rostopic或rviz,可以测试 ROS 节点的功能。例如,使用rostopic发布测试图像数据:rostopic pub /image sensor_msgs/Image "header: seq: 0 stamp: {secs: 0, nsecs: 0} frame_id: '' height: 480 width: 640 encoding: 'bgr8' is_bigendian: 0 step: 1920 data: '...' " -r 1 ``` 其中 `'...'` 表示测试图像数据的二进制编码。ROS 节点应该能够订阅该图像数据,并输出 UNet 模型的推理结果。
以上就是将 UNet 模型集成到伯恩大学的 ROS 框架下的基本步骤,具体实现可能会因为应用场景和具体情况而有所不同,需要根据实际需求进行调整和优化。
要测试 UNet 模型在 ROS 中的性能,可以使用 ROS 提供的工具 rostopic 和 rosbag 进行测试。
使用 rostopic 发布测试图像数据,可以测试 UNet 模型在 ROS 中的实时性能。例如,使用以下命令发布测试图像数据:
rostopic pub /image sensor_msgs/Image "header:
seq: 0
stamp: {secs: 0, nsecs: 0}
frame_id: ''
height: 480
width: 640
encoding: 'bgr8'
is_bigendian: 0
step: 1920
data: '...'
" -r 1
其中 '...' 表示测试图像数据的二进制编码。这将向 /image topic 发布一个测试图像数据,频率为 1Hz。ROS 节点应该能够订阅该图像数据,并输出 UNet 模型的推理结果。
使用 rosbag 记录和回放 ROS 消息,可以测试 UNet 模型在 ROS 中的离线性能。例如,使用以下命令记录测试数据:
rosbag record -O test.bag /image
这将记录 /image topic 的所有消息,并将其保存到名为 test.bag 的文件中。可以使用以下命令回放记录的数据:
rosbag play test.bag
这将回放 test.bag 文件中记录的所有消息,并将它们发布到相应的 topic 上。ROS 节点应该能够订阅该图像数据,并输出 UNet 模型的推理结果。
在测试性能时,还需要考虑一些其他因素,例如硬件性能和数据预处理的效率等。因此,在进行性能测试之前,需要仔细评估实际应用场景和所使用的硬件和软件环境,并进行相应的优化和调整。
ros命令详解
ROS(Robot Operating System)是一个用于机器人开发的开源框架,提供了许多命令行工具来协助开发和测试机器人应用程序。下面是一些常用的 ROS 命令及其功能:
-
roscore:启动 ROS 核心服务,包括参数服务器、消息总线等。在启动 ROS 节点之前,必须先启动 roscore。 -
rosrun:运行一个 ROS 节点。可以指定节点的名称、包名、执行文件等参数。例如:rosrun <package_name> <node_name> ``` -
roslaunch:使用 launch 文件启动一个或多个 ROS 节点。launch 文件是一个 XML 文件,可以指定要启动的节点、参数、运行顺序等信息。例如:roslaunch <package_name> <launch_file> ``` -
rostopic:查看、发布、订阅 ROS topic 的工具。可以使用该工具查看当前 ROS 系统中所有的 topic,发布消息到指定的 topic,订阅某个 topic 并查看其消息等。例如:rostopic list # 列出当前 ROS 系统中所有的 topic rostopic echo <topic> # 订阅指定的 topic 并查看其消息 rostopic pub <topic> <message_type> <message_data> # 向指定的 topic 发布消息 ``` -
rosmsg:查看 ROS message 的工具。可以使用该工具查看某个 ROS message 的定义、字段、数据类型等信息。例如:rosmsg show <message_type> # 显示指定 ROS message 的定义 rosmsg list # 列出当前 ROS 系统中所有的 message ``` -
rosservice:查看、调用 ROS service 的工具。可以使用该工具查看当前 ROS 系统中所有的 service,调用某个 service 并查看其响应等。例如:rosservice list # 列出当前 ROS 系统中所有的 service rosservice call <service> # 调用指定的 service 并查看其响应 ``` -
rosparam:设置、获取 ROS 参数的工具。可以使用该工具设置、获取当前 ROS 系统中的参数。例如:rosparam set <param_name> <param_value> # 设置指定的参数 rosparam get <param_name> # 获取指定的参数值 ``` -
rosbag:记录、回放 ROS 消息的工具。可以使用该工具记录 ROS 系统中的消息并保存到文件中,也可以从文件中回放消息。例如:rosbag record <topics> # 记录指定的 topic 的消息并保存到文件中 rosbag play <file> # 从指定的文件中回放消息 ```
这些是一些常用的 ROS 命令,还有许多其他的命令可以用于不同的 ROS 开发和测试任务。在使用这些命令时,可以使用 --help 参数查看更详细的使用说明。
ros有哪些库可以使用
ROS(Robot Operating System)提供了许多库和工具,用于开发和测试机器人应用程序。下面是一些常用的 ROS 库和功能包:
-
roscpp:ROS C++ 客户端库,提供了一个 C++ API,用于创建 ROS 节点、发布和订阅 ROS topic、调用 ROS service 等功能。 -
rospy:ROS Python 客户端库,提供了一个 Python API,用于创建 ROS 节点、发布和订阅 ROS topic、调用 ROS service 等功能。 -
cv_bridge:将 ROS 图像消息和 OpenCV 图像之间进行转换的库,可以方便地处理图像数据。 -
tf:ROS 的变换库,用于管理机器人的坐标系转换和机器人的姿态变换。 -
moveit:用于机器人运动规划和控制的 ROS 功能包,提供了运动规划、运动控制、碰撞检测等功能。 -
rviz:ROS 可视化工具,用于可视化机器人的状态、传感器数据、运动规划和控制等信息。 -
gazebo:用于模拟机器人的物理环境和传感器数据的 ROS 功能包,提供了模拟机器人的运动、碰撞检测、传感器数据等功能。 -
rosbag:用于记录和回放 ROS 消息的工具,可以记录 ROS 系统中的消息并保存到文件中,也可以从文件中回放消息。 -
ros_control:用于机器人运动控制的 ROS 功能包,提供了控制机器人关节、轨迹控制、力控制等功能。 -
navigation:用于机器人导航和路径规划的 ROS 功能包,提供了地图构建、路径规划、障碍物检测等功能。
以上是一些常用的 ROS 库和功能包,还有许多其他的库和功能包可以用于不同的 ROS 开发和测试任务。在使用这些库和功能包时,可以查阅官方文档,了解其使用方法和示例。
如何使用moveit进行机器人运动规划和控制?
使用 MoveIt 进行机器人运动规划和控制的基本步骤如下:
-
安装 MoveIt:使用 ROS 提供的工具
apt-get进行安装,例如:sudo apt-get install ros-<distro>-moveit ``` 其中 `<distro>` 是 ROS 的发行版,例如 `melodic` 或 `noetic`。 -
配置机器人模型:使用 MoveIt 提供的工具
MoveIt Setup Assistant配置机器人模型和运动规划器。该工具可以自动生成 MoveIt 的配置文件,并将其保存到指定的 package 中。例如:roslaunch moveit_setup_assistant setup_assistant.launch ``` -
启动 MoveIt:使用 MoveIt 提供的工具
roslaunch启动 MoveIt。roslaunch <move_group.launch> ``` 其中 `<move_group.launch>` 是保存 MoveIt 配置文件的 package 中的 launch 文件。 -
编写机器人控制程序:使用 ROS 提供的编程语言(C++ 或 Python)编写机器人控制程序,使用 MoveIt 提供的 API 进行机器人运动规划和控制。例如:
import moveit_commander # 初始化 MoveIt API moveit_commander.roscpp_initialize(sys.argv) # 创建一个 RobotCommander 对象,用于获取机器人信息 robot = moveit_commander.RobotCommander() # 创建一个 PlanningSceneInterface 对象,用于管理机器人的运动规划场景 scene = moveit_commander.PlanningSceneInterface() # 创建一个 MoveGroupCommander 对象,用于进行机器人运动规划和控制 group = moveit_commander.MoveGroupCommander("arm") # 设置机器人的目标位置 group.set_pose_target(target_pose) # 进行机器人运动规划 plan = group.plan() # 控制机器人进行运动 group.execute(plan) ```
以上是使用 MoveIt 进行机器人运动规划和控制的基本步骤和示例代码。在实际应用中,还需要根据具体的机器人和任务进行相应的配置和调整。可以查阅 MoveIt 官方文档,了解更详细的使用方法和示例。
如何在MoveIt中添加障碍物?
在 MoveIt 中添加障碍物可以通过以下步骤实现:
-
获取 Planning Scene:使用 MoveIt API 中的
PlanningSceneInterface类获取当前的 Planning Scene,例如:from moveit_msgs.msg import CollisionObject from shape_msgs.msg import SolidPrimitive from geometry_msgs.msg import Pose # 获取 Planning Scene planning_scene = moveit_commander.PlanningSceneInterface() ``` -
创建 Collision Object:创建一个
CollisionObject对象,表示要添加的障碍物。可以设置障碍物的形状、位置、姿态等参数。例如:# 创建一个 CollisionObject 对象 object = CollisionObject() object.id = "box" # 设置障碍物的形状 box = SolidPrimitive() box.type = SolidPrimitive.BOX box.dimensions = [1.0, 1.0, 1.0] object.primitives.append(box) # 设置障碍物的位置和姿态 pose = Pose() pose.position.x = 0.5 pose.position.y = 0.0 pose.position.z = 0.5 pose.orientation.w = 1.0 object.primitive_poses.append(pose) ``` -
将 Collision Object 添加到 Planning Scene 中:使用
PlanningSceneInterface类的add_object()方法将 Collision Object 添加到 Planning Scene 中,例如:# 将 Collision Object 添加到 Planning Scene 中 planning_scene.add_object(object) ``` -
更新 Planning Scene:使用
PlanningSceneInterface类的get_current_state()方法获取当前机器人的状态,然后使用PlanningSceneInterface类的set_current_state()方法将机器人状态更新到 Planning Scene 中,例如:# 更新 Planning Scene robot_state = robot.get_current_state() planning_scene.set_current_state(robot_state) ```
添加障碍物后,可以使用 MoveIt 进行机器人运动规划和控制,考虑到添加障碍物后的机器人运动规划,例如避开障碍物等。
如何使用rviz可视化
使用 rviz 可视化机器人状态、传感器数据、运动规划和控制等信息可以通过以下步骤实现:
-
启动 rviz:使用 ROS 提供的
roslaunch命令启动 rviz。roslaunch rviz rviz ```` -
添加可视化对象:在 rviz 中添加要可视化的对象,例如机器人模型、传感器数据、运动规划等。可以使用 rviz 提供的界面操作或者手动编辑配置文件进行添加。例如,添加机器人模型:
- 在 rviz 界面的左侧选择
Add按钮; - 在弹出的
Add对话框中选择RobotModel并点击OK; - 在 rviz 界面中即可显示机器人模型。
- 在 rviz 界面的左侧选择
-
配置可视化参数:根据需要设置可视化的参数,例如显示机器人状态、传感器数据、运动规划等的颜色、大小、透明度等。可以使用 rviz 提供的界面操作或者手动编辑配置文件进行设置。
-
启动 MoveIt:使用 MoveIt 提供的
roslaunch命令启动 MoveIt。roslaunch <move_group.launch> ```` -
运行机器人控制程序:使用 ROS 提供的编程语言(C++ 或 Python)编写机器人控制程序,并使用 MoveIt 提供的 API 进行机器人运动规划和控制。在运行机器人控制程序时,可以使用 ROS 提供的
rosrun命令或roslaunch命令启动程序。 -
在 rviz 中显示机器人状态和运动规划:使用 rviz 提供的界面操作或者手动编辑配置文件,在 rviz 中显示机器人状态和运动规划。例如,显示机器人状态:
- 在 rviz 界面的左侧选择
Add按钮; - 在弹出的
Add对话框中选择RobotModel并点击OK; - 在 rviz 界面中即可显示机器人模型和机器人状态。
- 在 rviz 界面的左侧选择
-
在 rviz 中显示传感器数据:使用 rviz 提供的界面操作或者手动编辑配置文件,在 rviz 中显示传感器数据。例如,显示激光雷达数据:
- 在 rviz 界面的左侧选择
Add按钮; - 在弹出的
Add对话框中选择LaserScan并点击OK; - 在 rviz 界面中即可显示激光雷达数据。
- 在 rviz 界面的左侧选择
以上是使用 rviz 可视化机器人状态、传感器数据、运动规划和控制等信息的基本步骤。在实际应用中,还需要根据具体的机器人和任务进行相应的配置和调整。可以查阅 rviz 官方文档和 MoveIt 官方文档,了解更详细的使用方法和示例。

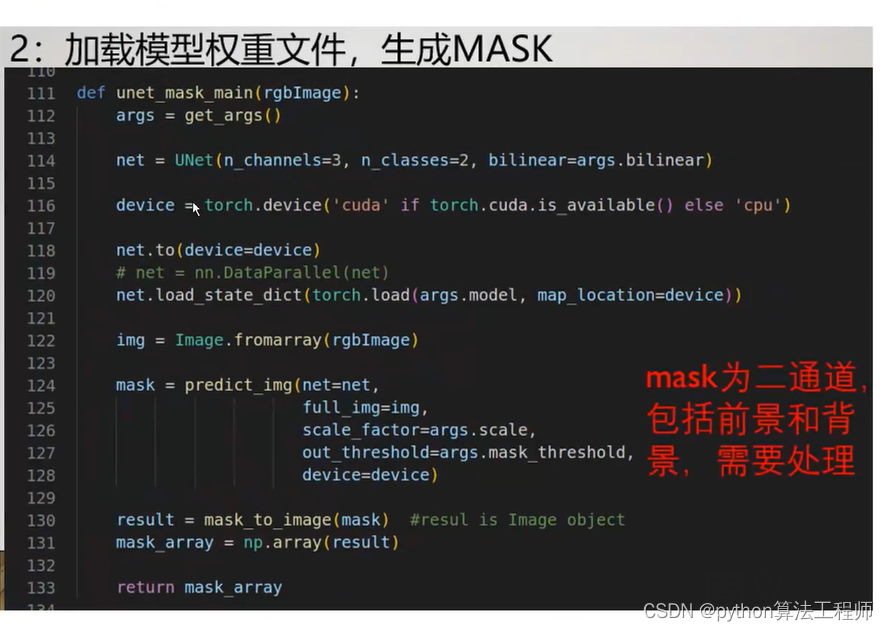
整理好成一个接口,并且把权重文件交付
导入ddp模型的时候有些不一样
DDP(Deep Deterministic Policy Gradient)多卡训练是一种使用多个 GPU 或机器进行训练的方法,可以加速模型的训练过程。在导入 DDP 多卡训练模型时,可能会遇到一些与单卡训练模型不同的情况,具体如下:
-
模型的保存格式:DDP 多卡训练模型通常需要保存为分布式数据并行模型(Distributed Data Parallel,DDP)的格式,而不是单卡训练模型的格式。因此,在导入 DDP 多卡训练模型时,需要注意模型的保存格式以及如何加载模型。
-
GPU 设备的设置:DDP 多卡训练模型需要设置每个 GPU 设备的编号和数量,以便进行数据并行和模型并行。在导入 DDP 多卡训练模型时,需要注意 GPU 设备的设置是否正确。
-
梯度的处理:DDP 多卡训练模型需要对梯度进行处理,以便在多个 GPU 设备之间进行同步和传递。通常,DDP 多卡训练模型使用分布式梯度平均(Distributed Gradient Averaging)的方法对梯度进行处理。在导入 DDP 多卡训练模型时,需要注意梯度的处理方法是否正确。
-
训练过程的调整:DDP 多卡训练模型的训练过程需要进行一些调整,例如设置学习率、批量大小、优化器等超参数的值,以便更好地适应多卡训练的环境。在导入 DDP 多卡训练模型时,需要注意训练过程的调整是否正确。
以上是导入 DDP 多卡训练模型时可能遇到的一些不同情况。在使用 DDP 多卡训练模型时,需要根据具体的应用场景进行相应的配置和调整,以确保模型的正确性和有效性。可以参考 PyTorch 官方文档和相关论文,了解更详细的信息。
ddp多卡训练的模型可以单卡进行推理吗?
DDP(Deep Deterministic Policy Gradient)多卡训练的模型通常可以在单卡上进行推理,但需要注意一些细节。
在 DDP 多卡训练中,模型是通过数据并行和模型并行的方式在多个 GPU 上进行训练的。在训练过程中,每个 GPU 负责处理其中的一部分数据和模型参数,并将处理结果发送到主 GPU 上进行聚合和更新。
在进行推理时,可以将 DDP 多卡训练的模型加载到单个 GPU 上,并进行正常的推理操作。但需要注意以下几点:
-
模型的保存格式:DDP 多卡训练的模型通常需要保存为分布式数据并行模型(Distributed Data Parallel,DDP)的格式,而不是单卡训练模型的格式。在进行推理时,需要将 DDP 模型转换为单卡模型的格式,并将其加载到单个 GPU 上。
-
模型参数的同步:在 DDP 多卡训练中,模型的参数是分布在多个 GPU 上的。在进行推理时,需要将模型参数从多个 GPU 上同步到单个 GPU 上,以便进行推理操作。可以使用 PyTorch 提供的
nn.DataParallel类或nn.parallel.DistributedDataParallel类实现模型参数的同步。 -
批量大小的调整:在 DDP 多卡训练中,通常使用较大的批量大小进行训练,以充分利用多个 GPU 的计算能力。在进行推理时,需要根据单个 GPU 的计算能力和内存容量,调整批量大小的值,以避免出现内存不足或计算速度过慢的情况。
综上所述,DDP 多卡训练的模型通常可以在单卡上进行推理,但需要注意模型的保存格式、模型参数的同步和批量大小的调整等细节。可以参考 PyTorch 官方文档和相关论文,了解更详细的信息。
如何 DDP 模型转换为单卡模型的格式,并将其加载到单个 GPU 上
将 DDP(Deep Deterministic Policy Gradient)模型转换为单卡模型的格式,并将其加载到单个 GPU 上,可以通过以下步骤实现:
-
加载 DDP 模型:使用 PyTorch 提供的
torch.nn.parallel.DistributedDataParallel类加载 DDP 模型,并将其保存为单个 GPU 上可以使用的格式。例如:import torch # 加载 DDP 模型 ddp_model = torch.nn.parallel.DistributedDataParallel(model) # 转换为单卡模型的格式 single_model = ddp_model.module # 保存单卡模型的参数 torch.save(single_model.state_dict(), "single_model.pth") ``` -
加载单卡模型:使用 PyTorch 提供的
torch.load()函数加载单卡模型,并将其加载到单个 GPU 上。例如:# 加载单卡模型 single_model = Model() single_model.load_state_dict(torch.load("single_model.pth")) # 将模型加载到单个 GPU 上 device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu") single_model.to(device) ```
以上是将 DDP 模型转换为单卡模型的格式,并将其加载到单个 GPU 上的基本步骤。在实际应用中,还需要根据具体的模型和应用场景进行相应的配置和调整。可以参考 PyTorch 官方文档和相关论文,了解更详细的信息。
 只要会python,C++ 学ros做项目三天就能学会
只要会python,C++ 学ros做项目三天就能学会
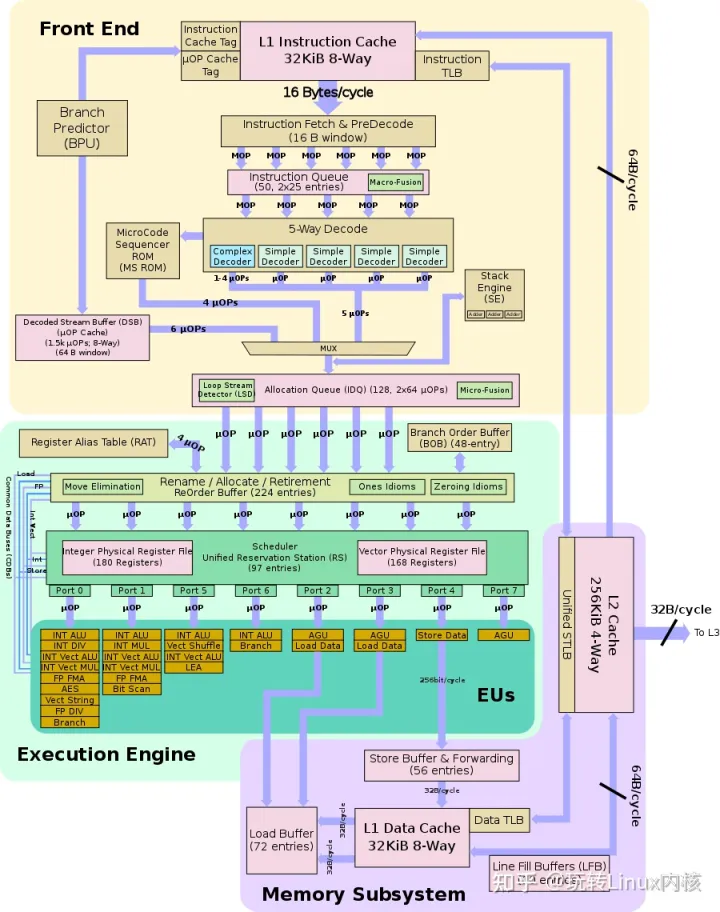
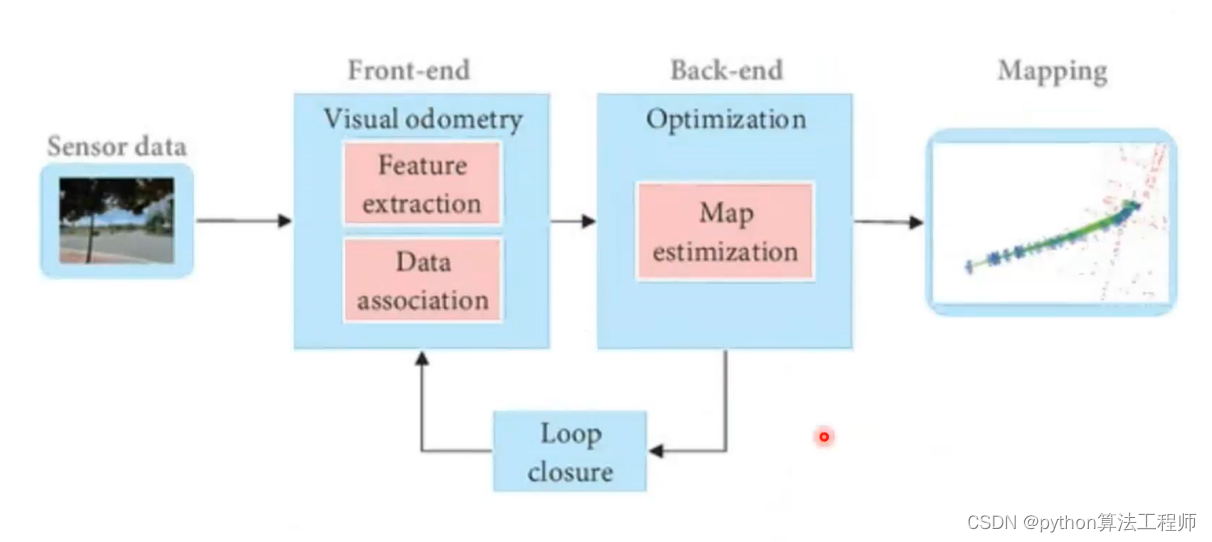
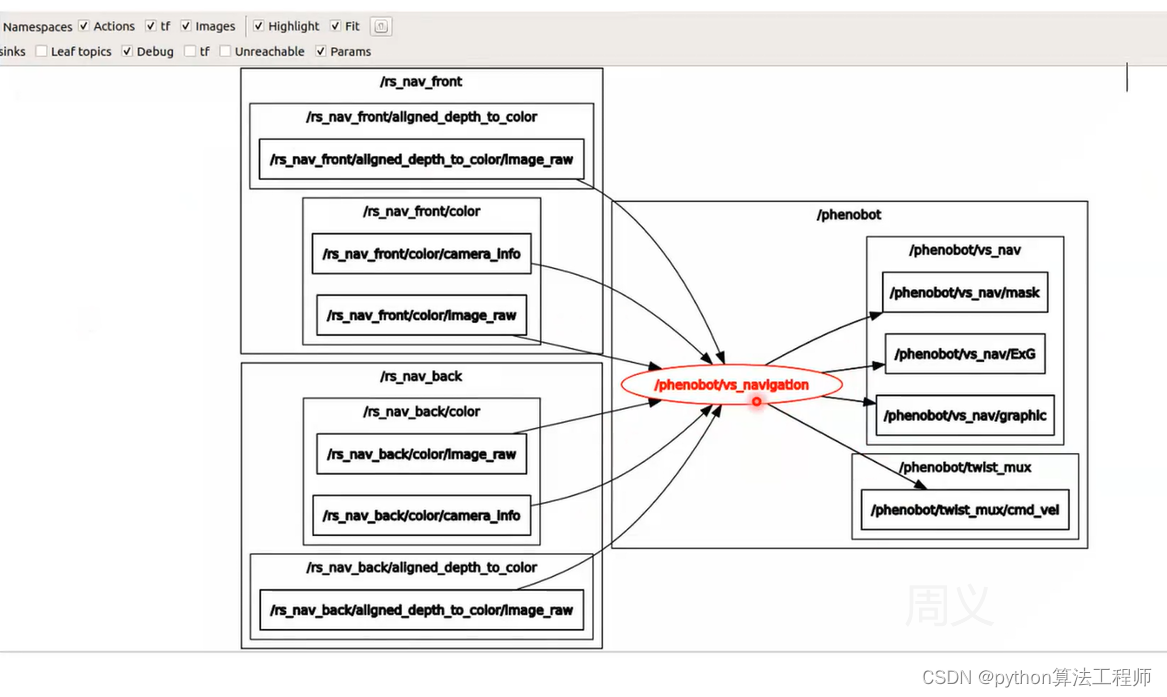 中心是可执行文件,左边是传感器,右边是传感器数据
中心是可执行文件,左边是传感器,右边是传感器数据
 http://wiki.ros.org/ROS/Tutorials
http://wiki.ros.org/ROS/Tutorials
只要搞清楚什么是发布者什么是订阅者就行了
在 ROS(Robot Operating System)中,发布者(Publisher)和订阅者(Subscriber)是两个重要的概念,用于实现 ROS 中节点之间的通信。
发布者(Publisher)是一个 ROS 节点,用于发布消息(Message)到 ROS 网络中,其他节点可以通过订阅者(Subscriber)来接收这些消息。发布者通常使用 ROS 提供的 ros::Publisher 类来实现,该类提供了向 ROS 网络中发布消息的函数和方法。
订阅者(Subscriber)是一个 ROS 节点,用于订阅某个特定的主题(Topic),以接收该主题发布的消息。订阅者通常使用 ROS 提供的 ros::Subscriber 类来实现,该类提供了订阅主题和接收消息的函数和方法。
在 ROS 中,发布者和订阅者是根据主题(Topic)来区分的。主题是一种用于在 ROS 网络中传递消息的机制,类似于一个话题或频道,用于将发布者和订阅者连接起来。发布者将消息发布到某个主题中,订阅者通过订阅该主题来接收发布者发布的消息。
因此,可以说在 ROS 中,发布者是将消息发布到某个主题的节点,而订阅者是从某个主题中接收消息的节点。可以通过 ROS 提供的工具和命令行工具,如rostopic 命令,来查看和管理 ROS 网络中的发布者和订阅者。
在 ROS(Robot Operating System)中,创建一个发布者(Publisher)节点,可以通过以下步骤实现:
- 创建 ROS 节点:使用 ROS 提供的
ros::init()函数和ros::NodeHandle类创建一个 ROS 节点。例如:
#include "ros/ros.h"
int main(int argc, char **argv)
{
// 初始化 ROS 节点
ros::init(argc, argv, "publisher_node");
// 创建 ROS 节点句柄
ros::NodeHandle n;
// ...
}
- 创建发布者对象:使用 ROS 提供的
ros::Publisher类创建一个发布者对象,指定发布的主题名称和消息类型。例如:
#include "ros/ros.h"
#include "std_msgs/String.h"
int main(int argc, char **argv)
{
// 初始化 ROS 节点
ros::init(argc, argv, "publisher_node");
// 创建 ROS 节点句柄
ros::NodeHandle n;
// 创建发布者对象
ros::Publisher pub = n.advertise<std_msgs::String>("topic_name", 1000);
// ...
}
其中,std_msgs::String 是 ROS 中的一种常用消息类型,用于传递字符串类型的数据。
- 发布消息:使用发布者对象的
publish()函数发布消息。例如:
#include "ros/ros.h"
#include "std_msgs/String.h"
int main(int argc, char **argv)
{
// 初始化 ROS 节点
ros::init(argc, argv, "publisher_node");
// 创建 ROS 节点句柄
ros::NodeHandle n;
// 创建发布者对象
ros::Publisher pub = n.advertise<std_msgs::String>("topic_name", 1000);
// 创建消息对象
std_msgs::String msg;
msg.data = "Hello, world!";
// 发布消息
pub.publish(msg);
// ...
}
以上是创建一个发布者节点的基本步骤。在实际应用中,还需要根据具体的需求和应用场景进行相应的配置和调整。可以参考 ROS 官方文档和相关教程,了解更详细的信息。
在 ROS(Robot Operating System)中,创建一个订阅者(Subscriber)节点,可以通过以下步骤实现:
- 创建 ROS 节点:使用 ROS 提供的
ros::init()函数和ros::NodeHandle类创建一个 ROS 节点。例如:
#include "ros/ros.h"
#include "std_msgs/String.h"
void callback(const std_msgs::String::ConstPtr& msg)
{
ROS_INFO("Received: %s", msg->data.c_str());
}
int main(int argc, char **argv)
{
// 初始化 ROS 节点
ros::init(argc, argv, "subscriber_node");
// 创建 ROS 节点句柄
ros::NodeHandle n;
// ...
}
- 创建订阅者对象:使用 ROS 提供的
ros::Subscriber类创建一个订阅者对象,指定订阅的主题名称和消息类型,并将回调函数绑定到订阅者对象上。例如:
#include "ros/ros.h"
#include "std_msgs/String.h"
void callback(const std_msgs::String::ConstPtr& msg)
{
ROS_INFO("Received: %s", msg->data.c_str());
}
int main(int argc, char **argv)
{
// 初始化 ROS 节点
ros::init(argc, argv, "subscriber_node");
// 创建 ROS 节点句柄
ros::NodeHandle n;
// 创建订阅者对象
ros::Subscriber sub = n.subscribe("topic_name", 1000, callback);
// ...
}
其中,callback 函数是一个回调函数,用于处理接收到的消息。
- 运行 ROS 节点:使用 ROS 提供的
ros::spin()函数或ros::Rate类运行 ROS 节点。例如:
#include "ros/ros.h"
#include "std_msgs/String.h"
void callback(const std_msgs::String::ConstPtr& msg)
{
ROS_INFO("Received: %s", msg->data.c_str());
}
int main(int argc, char **argv)
{
// 初始化 ROS 节点
ros::init(argc, argv, "subscriber_node");
// 创建 ROS 节点句柄
ros::NodeHandle n;
// 创建订阅者对象
ros::Subscriber sub = n.subscribe("topic_name", 1000, callback);
// 运行 ROS 节点
ros::spin();
// ...
}
以上是创建一个订阅者节点的基本步骤。在实际应用中,还需要根据具体的需求和应用场景进行相应的配置和调整。可以参考 ROS 官方文档和相关教程,了解更详细的信息。
在 ROS(Robot Operating System)中,发布一个消息可以通过以下步骤实现:
- 创建 ROS 节点:使用 ROS 提供的
ros::init()函数和ros::NodeHandle类创建一个 ROS 节点。例如:
#include "ros/ros.h"
#include "std_msgs/String.h"
int main(int argc, char **argv)
{
// 初始化 ROS 节点
ros::init(argc, argv, "publisher_node");
// 创建 ROS 节点句柄
ros::NodeHandle n;
// ...
}
- 创建发布者对象:使用 ROS 提供的
ros::Publisher类创建一个发布者对象,指定发布的主题名称和消息类型。例如:
#include "ros/ros.h"
#include "std_msgs/String.h"
int main(int argc, char **argv)
{
// 初始化 ROS 节点
ros::init(argc, argv, "publisher_node");
// 创建 ROS 节点句柄
ros::NodeHandle n;
// 创建发布者对象
ros::Publisher pub = n.advertise<std_msgs::String>("topic_name", 1000);
// ...
}
其中,std_msgs::String 是 ROS 中的一种常用消息类型,用于传递字符串类型的数据。
- 创建消息对象:使用消息类型对应的类创建一个消息对象,并设置消息的内容。例如:
#include "ros/ros.h"
#include "std_msgs/String.h"
int main(int argc, char **argv)
{
// 初始化 ROS 节点
ros::init(argc, argv, "publisher_node");
// 创建 ROS 节点句柄
ros::NodeHandle n;
// 创建发布者对象
ros::Publisher pub = n.advertise<std_msgs::String>("topic_name", 1000);
// 创建消息对象
std_msgs::String msg;
msg.data = "Hello, world!";
// ...
}
- 发布消息:使用发布者对象的
publish()函数发布消息。例如:
#include "ros/ros.h"
#include "std_msgs/String.h"
int main(int argc, char **argv)
{
// 初始化 ROS 节点
ros::init(argc, argv, "publisher_node");
// 创建 ROS 节点句柄
ros::NodeHandle n;
// 创建发布者对象
ros::Publisher pub = n.advertise<std_msgs::String>("topic_name", 1000);
// 创建消息对象
std_msgs::String msg;
msg.data = "Hello, world!";
// 发布消息
pub.publish(msg);
// ...
}
以上是发布一个消息的基本步骤。在实际应用中,还需要根据具体的需求和应用场景进行相应的配置和调整。可以参考 ROS 官方文档和相关教程,了解更详细的信息。
在 ROS(Robot Operating System)中,订阅一个消息可以通过以下步骤实现:
- 创建 ROS 节点:使用 ROS 提供的
ros::init()函数和ros::NodeHandle类创建一个 ROS 节点。例如:
#include "ros/ros.h"
#include "std_msgs/String.h"
void callback(const std_msgs::String::ConstPtr& msg)
{
ROS_INFO("Received: %s", msg->data.c_str());
}
int main(int argc, char **argv)
{
// 初始化 ROS 节点
ros::init(argc, argv, "subscriber_node");
// 创建 ROS 节点句柄
ros::NodeHandle n;
// ...
}
其中,callback 函数是一个回调函数,用于处理接收到的消息。
- 创建订阅者对象:使用 ROS 提供的
ros::Subscriber类创建一个订阅者对象,指定订阅的主题名称和消息类型,并将回调函数绑定到订阅者对象上。例如:
#include "ros/ros.h"
#include "std_msgs/String.h"
void callback(const std_msgs::String::ConstPtr& msg)
{
ROS_INFO("Received: %s", msg->data.c_str());
}
int main(int argc, char **argv)
{
// 初始化 ROS 节点
ros::init(argc, argv, "subscriber_node");
// 创建 ROS 节点句柄
ros::NodeHandle n;
// 创建订阅者对象
ros::Subscriber sub = n.subscribe("topic_name", 1000, callback);
// ...
}
其中,std_msgs::String 是 ROS 中的一种常用消息类型,用于传递字符串类型的数据。
- 运行 ROS 节点:使用 ROS 提供的
ros::spin()函数或ros::Rate类运行 ROS 节点。例如:
#include "ros/ros.h"
#include "std_msgs/String.h"
void callback(const std_msgs::String::ConstPtr& msg)
{
ROS_INFO("Received: %s", msg->data.c_str());
}
int main(int argc, char **argv)
{
// 初始化 ROS 节点
ros::init(argc, argv, "subscriber_node");
// 创建 ROS 节点句柄
ros::NodeHandle n;
// 创建订阅者对象
ros::Subscriber sub = n.subscribe("topic_name", 1000, callback);
// 运行 ROS 节点
ros::spin();
// ...
}
以上是订阅一个消息的基本步骤。在实际应用中,还需要根据具体的需求和应用场景进行相应的配置和调整。可以参考 ROS 官方文档和相关教程,了解更详细的信息。
在 ROS(Robot Operating System)中,可以使用 rostopic 命令行工具查看某个主题的订阅者列表。具体步骤如下:
- 打开终端,输入以下命令,查看某个主题的订阅者列表:
rostopic info topic_name
其中,topic_name 是要查看的主题名称。
- 查看输出结果,找到
Subscribers部分,即可看到该主题的订阅者列表,包括订阅者节点的名称和订阅的消息数量。
例如,输出结果可能类似如下:
Type: std_msgs/String
Publishers:
* /publisher_node (http://xxx.xxx.xxx.xxx:xxxxx/)
Subscribers:
* /subscriber_node_1 (http://xxx.xxx.xxx.xxx:xxxxx/) [1 message]
* /subscriber_node_2 (http://xxx.xxx.xxx.xxx:xxxxx/) [1 message]
其中,/subscriber_node_1 和 /subscriber_node_2 是订阅该主题的节点名称,[1 message] 表示该节点已经接收到了一条消息。
除了 rostopic 工具外,也可以使用 rqt_graph 工具进行可视化查看,它可以显示 ROS 系统中的所有节点、主题和消息流向关系。具体使用方法可以参考 ROS 官方文档和相关教程。
在 ROS(Robot Operating System)中,实现节点之间的双向通讯可以通过以下方法实现:
-
创建发布者和订阅者节点:创建两个节点,一个作为发布者(Publisher),一个作为订阅者(Subscriber)。发布者节点将数据发布到某个主题上,订阅者节点订阅该主题并接收数据。
-
定义消息类型:发布者节点和订阅者节点需要在消息传递时使用相同的消息类型。可以使用 ROS 提供的消息类型,例如
std_msgs/String,也可以自定义消息类型。 -
发布者节点向某个主题发布数据:在发布者节点中,使用
ros::Publisher对象的publish()函数向某个主题发布数据。 -
订阅者节点接收数据:在订阅者节点中,使用
ros::Subscriber对象订阅某个主题,并在回调函数中处理接收到的数据。 -
订阅者节点向某个主题发布数据:在订阅者节点中,使用
ros::Publisher对象的publish()函数向某个主题发布数据。 -
发布者节点接收数据:在发布者节点中,使用
ros::Subscriber对象订阅某个主题,并在回调函数中处理接收到的数据。
需要注意的是,节点之间的通讯是异步的,即发布者节点和订阅者节点之间的通讯和订阅者节点和发布者节点之间的通讯是独立的,不能保证完全同步。
以上是实现节点之间双向通讯的基本方法。在实际应用中,还需要根据具体的需求和应用场景进行相应的配置和调整。可以参考 ROS 官方文档和相关教程,了解更详细的信息。
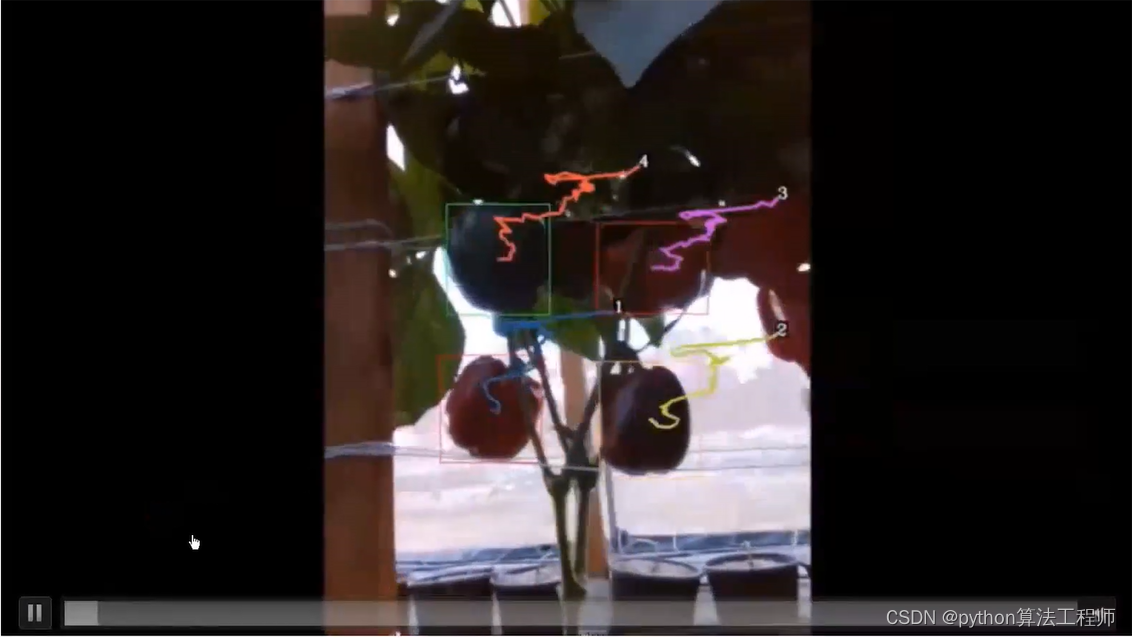 跟踪数果树的果子
跟踪数果树的果子
 yolo再加跟踪
yolo再加跟踪
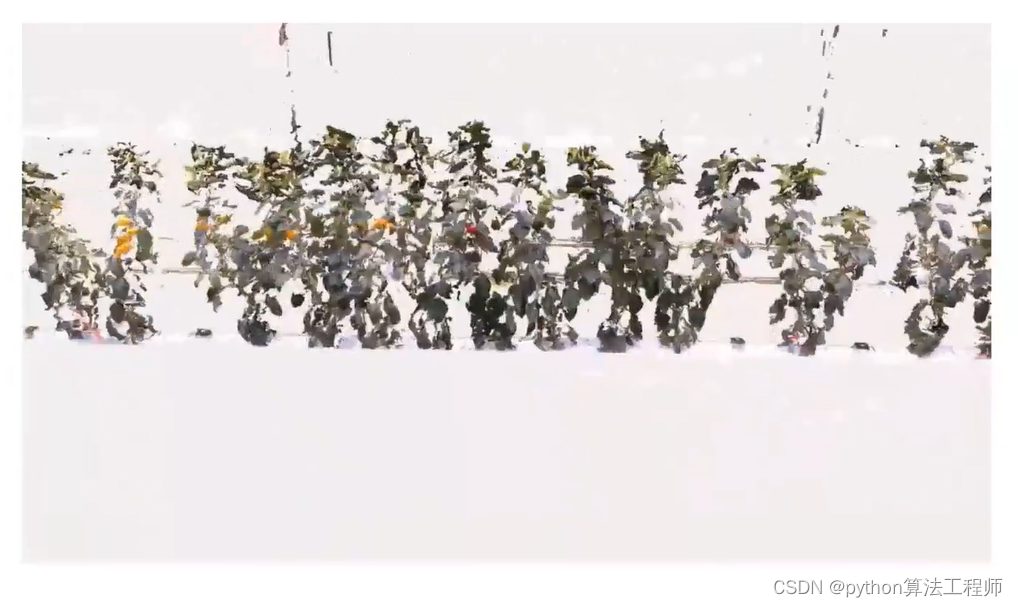
slam三维重构

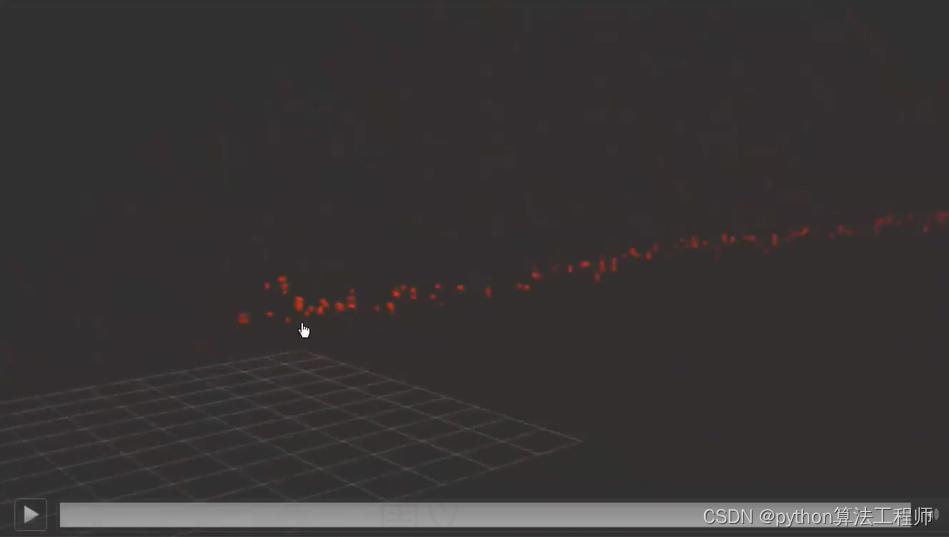 红色的是水果,检测果树是否分布过于密集
红色的是水果,检测果树是否分布过于密集
 C++ tensorrt openvion
C++ tensorrt openvion
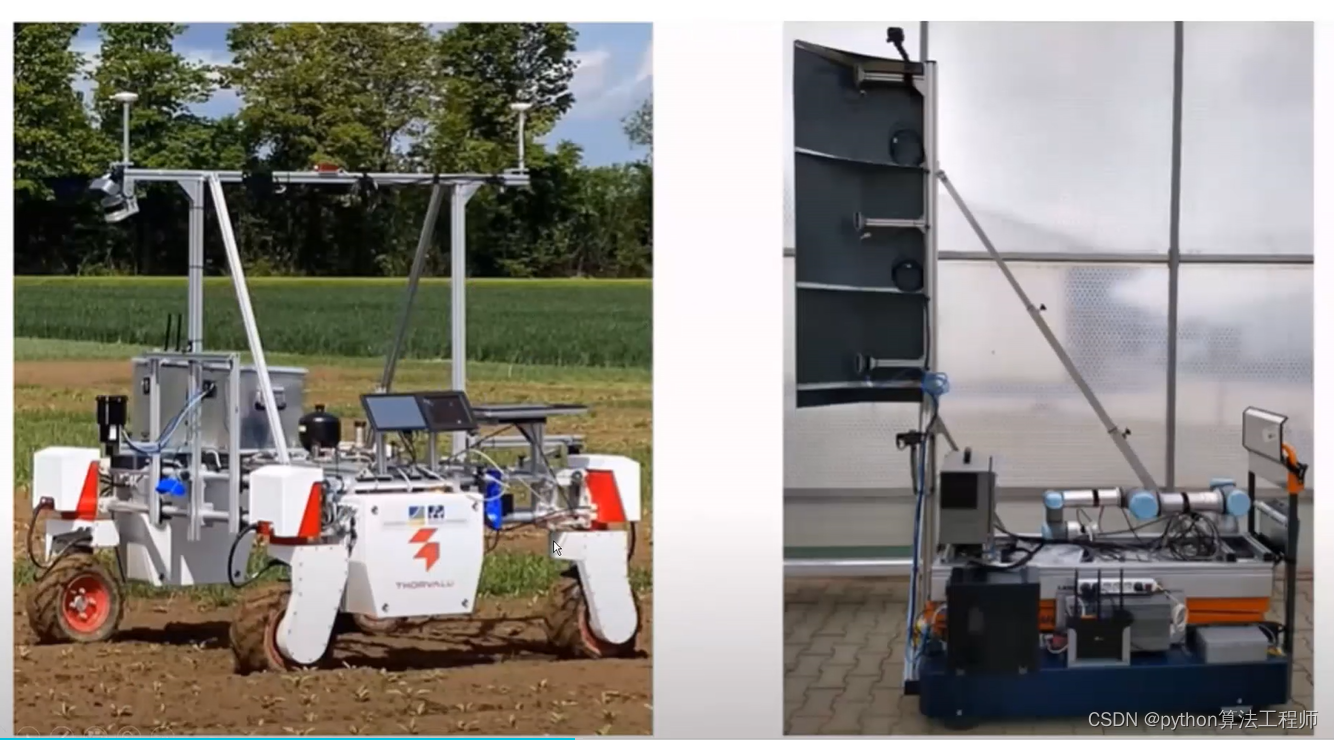
 一些搞农业的牛逼的人
一些搞农业的牛逼的人
全局定位导航与多传感器
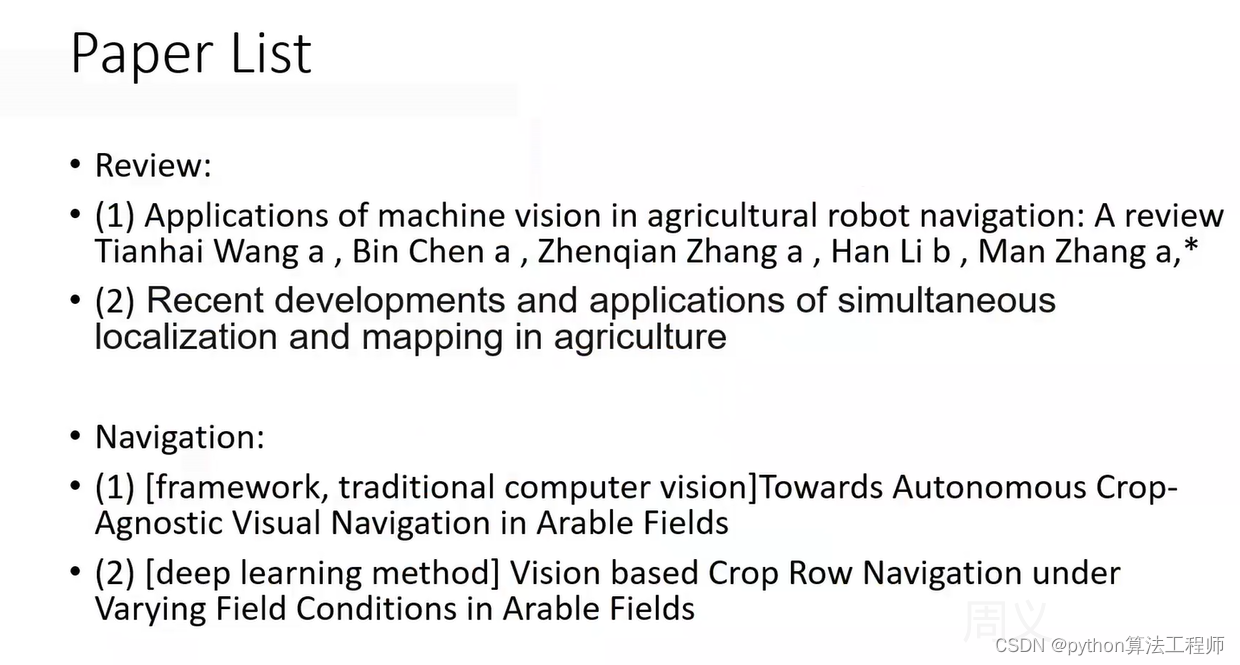
An Effective Multi-Cue Positioning System for Agricultural Robotics
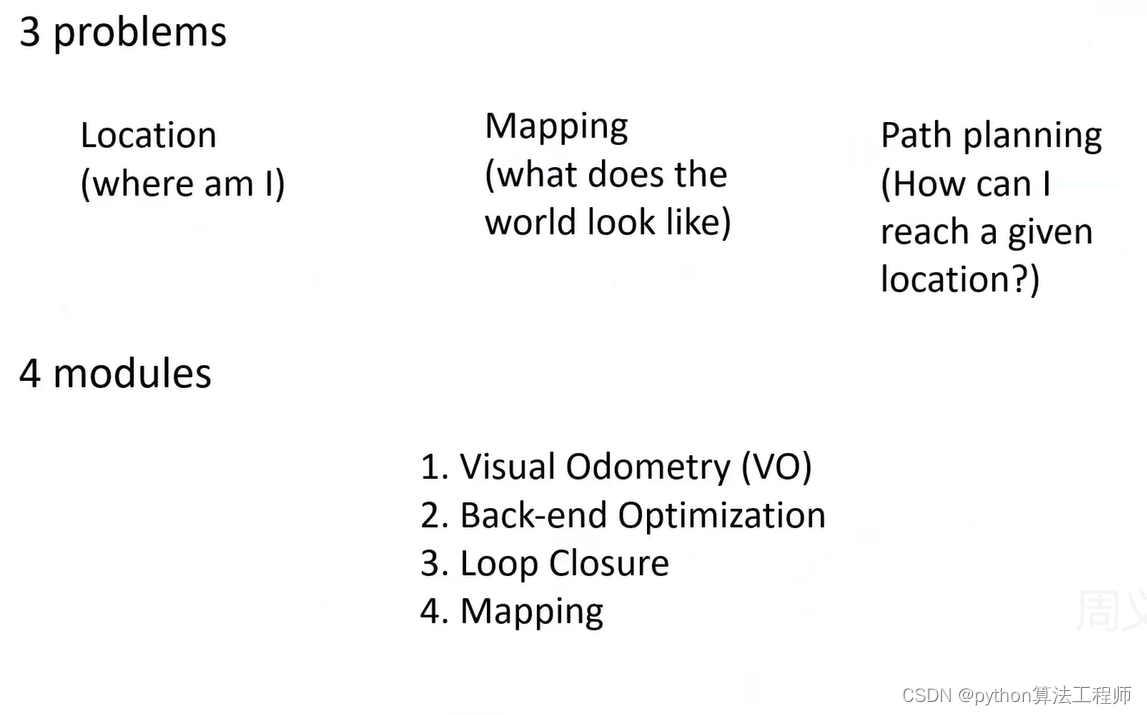
slam