目录
*一、广度优先遍历(BFS)
广度优先生成树
广度优先生成森林
*二、深度优先遍历
深度优先生成树
深度优先生成森林
二、应用
2.1最小生成树
*Prim算法
*Kruskal算法
2.2最短路径
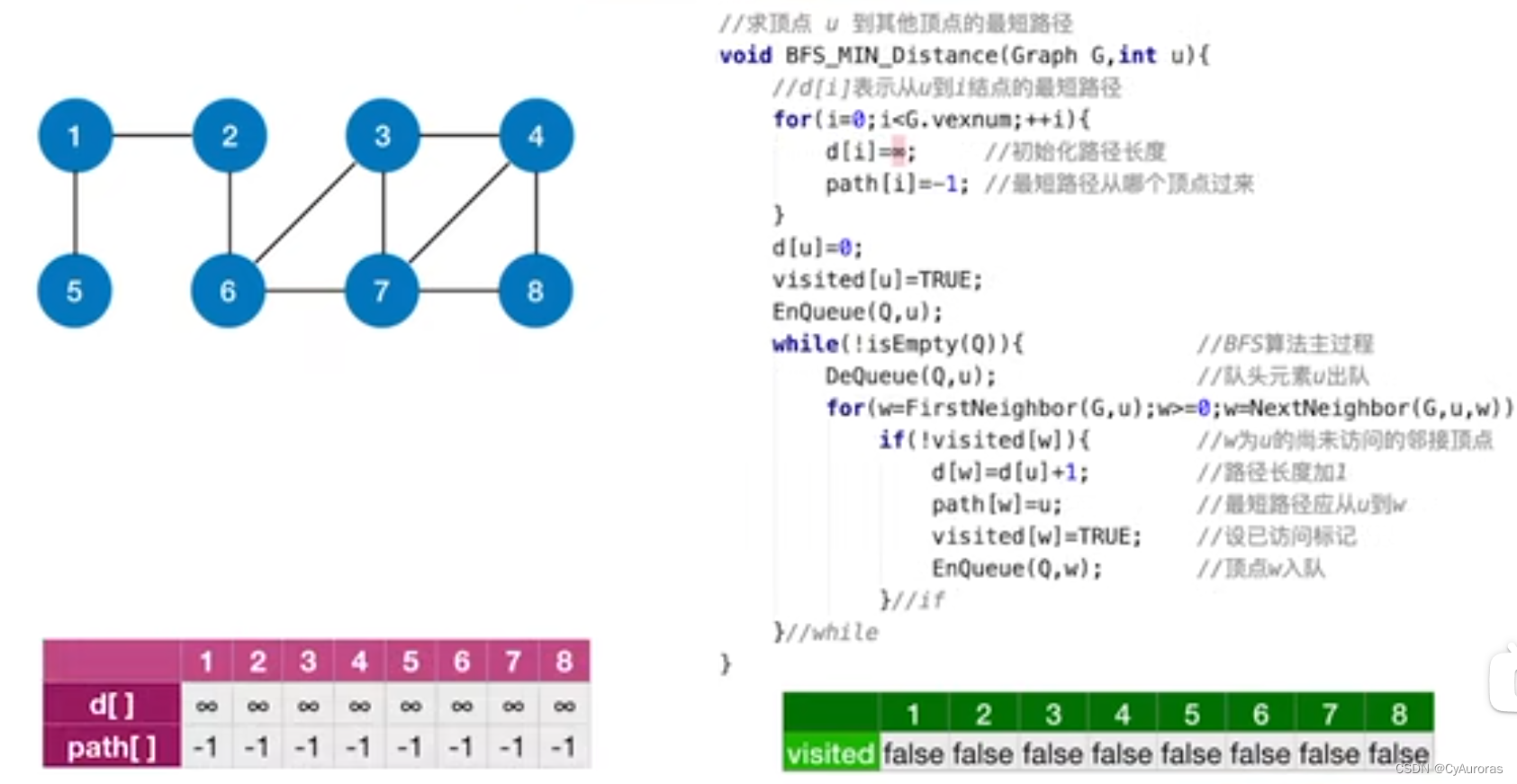
*BFS算法
*Dijkstra算法
*Floyd算法
*2.3有向无环图(DAG网)
*2.4拓扑排序(AOV网)
*逆拓扑排序
*2.5关键路径(AOE网)
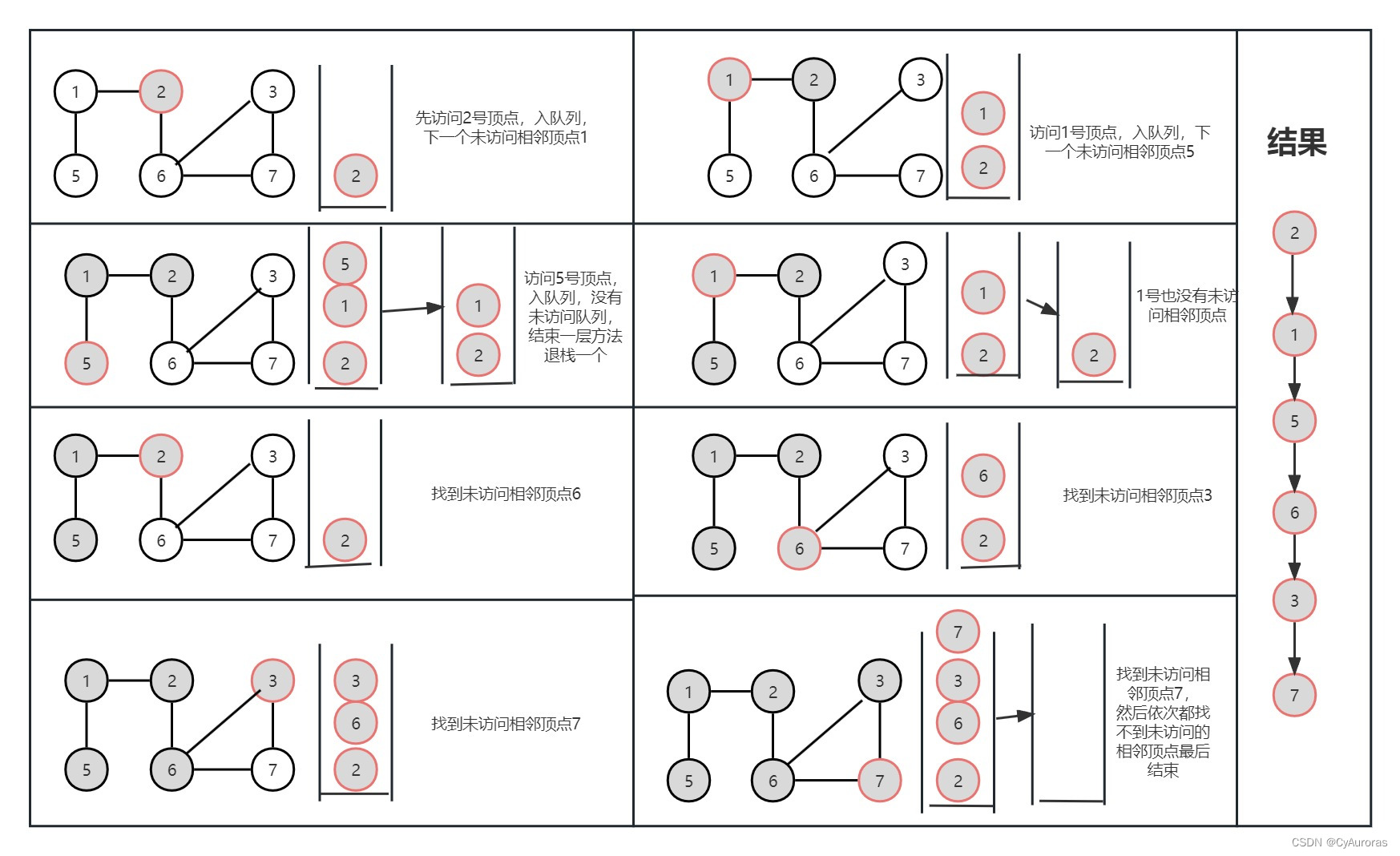
*一、广度优先遍历(BFS)
类似树的广度遍历

FirstNeighbor(G,x):求图G中顶点x的第一个邻接点,若有则返回顶点号,没有返回-1
NextNrighbor(G,x,y):假设图G中顶点y是顶点x的邻接点,返回除y之外顶点x的下一个邻接点的顶点号,若y就是最后一个返回-1
bool visited[MAX_VERTEX_NUM]; //访问标记数组
void BFS(Graph G,int v){
visit(v); //访问初始顶点v
visited[v]=TRUE; //对v做已访问标记
Enqueue(Q,v); //入队列
while(!isEmpty(Q)){
Dequeue(Q,v); //顶点v出队
for(w=FirstNeighbor(G,v);w>=0;w=NextNeighbor(G,v,w)){ //检测v所以邻接点
if(!visited[w]){
visit(w); //访问顶点w
visited[w]=TRUE; //对w做已访问标记
Enqueue(Q,w); //入队列
}
}
}
}void BFSraverse(Graph G){
for(i=0;i<G.vexnum;++i)
visired[i]=FASLE; //初始化标记数组
InitQueue(Q); //初始化辅助队列
for(i=0;i<G.vexnum;++i)
if(!visited[i]) //对每个连通分量调用一次BFS
BFS(G,i);
}空间复杂度:最坏。辅助队列O(V)
邻接矩阵时间复杂度:
邻接表时间复杂度:
广度优先生成树
邻接表生成不唯一,具体看数据先后顺序
广度优先生成森林
一个连通分量一个树,多个(非连通图)就是森林
*二、深度优先遍历
类似树的先序遍历
bool visited[MAX_VERTEX_NUM]; //访问标记数组
void DFS(Graph G,int v){
visit(v); //访问v
visited[v]=TRUE; //标记已访问
for(w=FirstNeighbor(G,V);w>=0;w=NextNeighor(G,v,w)) //邻接顶点
if(!visited[w]){
DFS(G,w);
}
}void DFSraverse(Graph G){
for(v=0;v<G.vwxnum;++v)
visited[v]=FALSE;
for(v=0;v<G.vexnum;++v)
if(!visited[v])
DFS(G,v);
}空间复杂度:最后O(1) ,最坏情况:O(V)
邻接矩阵时间复杂度:
邻接表时间复杂度:
邻接表存储顺序性不一致,遍历序列不一样
深度优先生成树
邻接表生成不唯一,具体看数据先后顺序
深度优先生成森林
一个连通分量一个树,多个(非连通图)就是森林
二、应用
2.1最小生成树
*Prim算法
从某一个顶点开始构建生成树;每一次将代价最小的新顶点纳入生成树,直到所有顶点都纳入为止
时间复杂度: 适用于边稠密图

*Kruskal算法
每次选择一条权值最小边,使这条边两头连通(已经连通不用),直到所有结点连通
时间复杂度: 适合用于边稀疏图

2.2最短路径

*BFS算法

*Dijkstra算法


*Floyd算法
动态规划思想


每轮看 ,n为第几轮,n也就是几个顶点为中转点
| A | |||||||||||||
| 0 | 6 | 13 | 0 | 6 | 13 | 0 | 6 | 10 | 0 | 6 | 10 | ||
| 10 | 0 | 4 | 10 | 0 | 4 | 10 | 0 | 4 | 9 | 0 | |||
| 5 | ∞ | 0 | 5 | 11 | 5 | 5 | 11 | 0 | 5 | 11 | 0 | ||
中转点为第几轮换的就是几
| -1 | -1 | 1 | ||
| 2 | -1 | -1 | ||
| -1 | 0 | -1 |
第一轮():
,更新值
第二轮():
第三轮():
几个顶点几轮
根据上面
可知
到
最短路径为4,根据
为-1没有中转,路径为
根据上面
到
for(int k=0;k<n;lk++){ //考虑vk为中转点
for(int i=0;i<n;i++){ //遍历矩阵,i行,j列
for(int j=0;j<n;j++){
if(A[i][j]>A[i][k]+A[k][j]){ //以vk为中转点的路径更短
A[i][j]=A[i][k]+A[k][j]; //最短路径
path[i][j]=k; //中转点
}
}
}
} 时间复杂度:
空间复杂度:
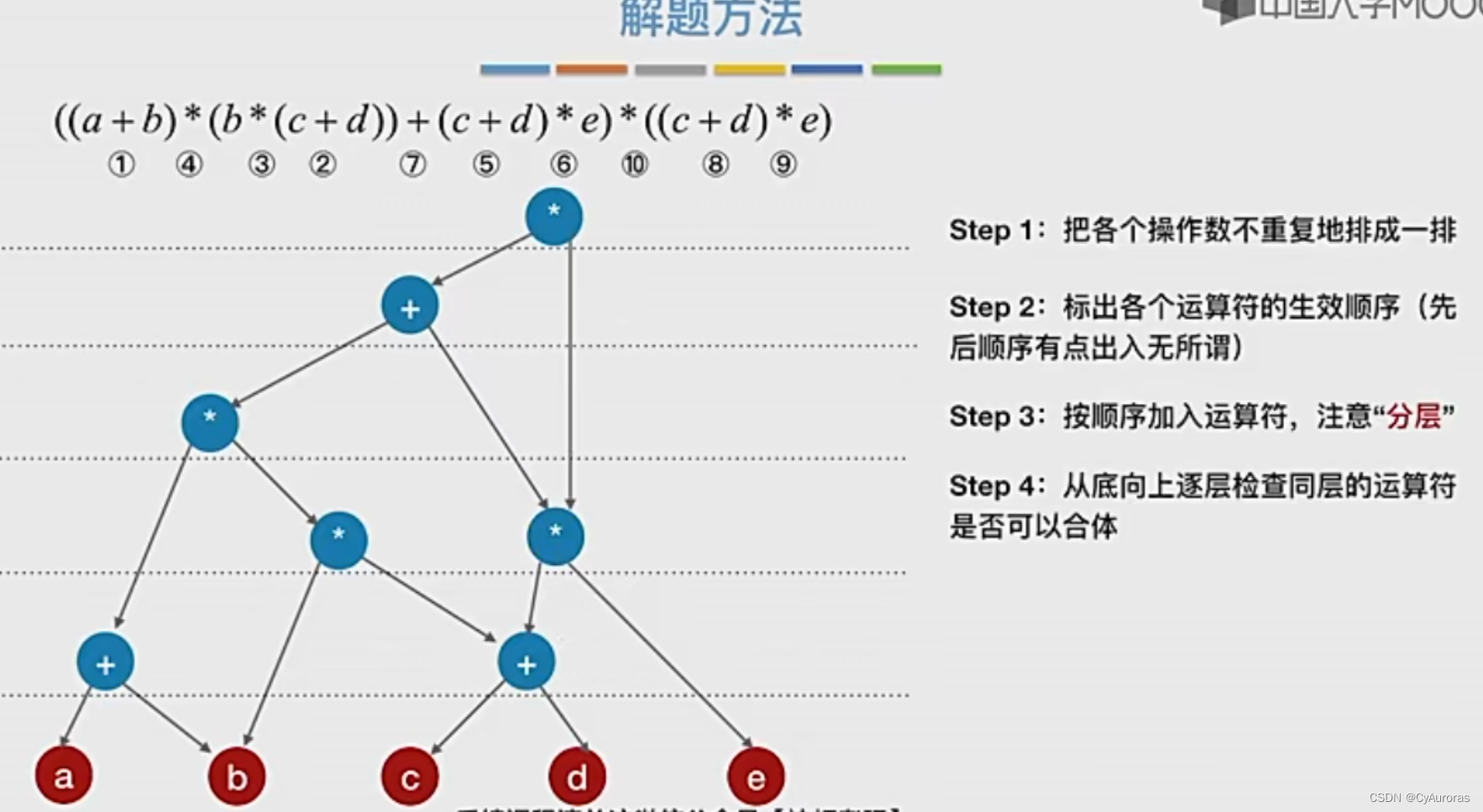
*2.3有向无环图(DAG网)
若一个有向图中不存在环,则称为有向无环图,简称DAG图

有向无环图是描述含有公共子式的表达式的有效工具,列如表达式

DAG不可能出现重复操作数
*2.4拓扑排序(AOV网)
AOV网:若用DAG图表示一个工程图,其顶点表示活动,用边表示活动必选先于活动
进行的这样一种关系,则这种有向图称顶点表示活动的网络,记为AOV网。
是
的直接前驱,
是
直接后继,不能自己做自己的前驱和后继。每个工程只出现一次



时间复杂度:
若采用邻接矩阵则
*逆拓扑排序



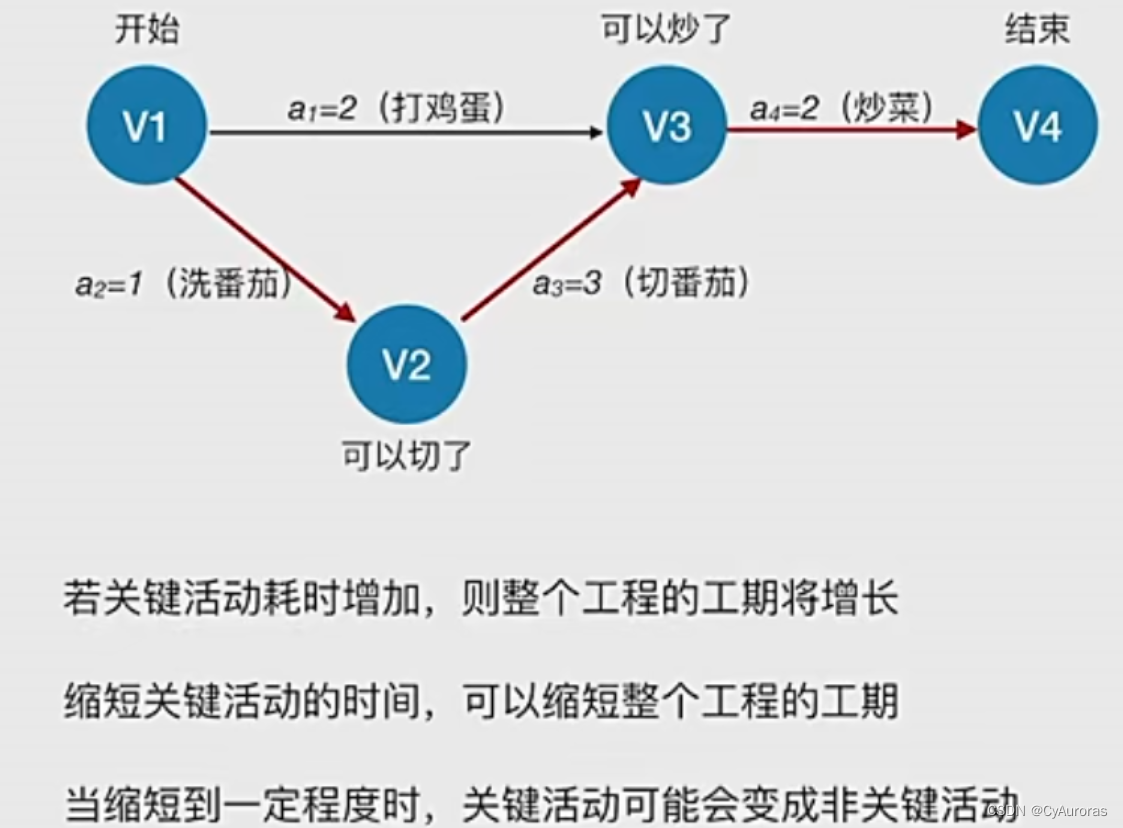
*2.5关键路径(AOE网)
在带权有向图中,以顶点表示事件,以有向边表示活动,以边上的权值表示完成该活动的 开销(如时间),称之为用边表示活动的网络,简称AOE网

源点:AOE网仅有一个入度未0的顶点,称为开始顶点(源点),表示工程的开始。
汇点:也仅有一个出度为0的顶点,称结束顶点(汇点),表示工程的结束
关键路径:从源点到汇点路径可能有多条,所有路径中,路径出度最大的为关键路径
事件(顶点)
最早发生时间
:决定了所有从
活动(边)
的最早开始时间
:指该活动弧的起点所表示事件的最早发生时间
事件
:指不推迟整个工程前提下,事件最迟必选发生的时间
活动(边)
:指活动弧的终点所表示事件的最迟发生时间与该活动所需时间之差。

时间余量:

关键活动、关键路径的特性