本文为使用OpticStudio工具设计优化HUD抬头显示器系统的第二部分,主要包含演示了如何使用OpticStudio工具设计分析抬头显示器(HUD)性能,即全视场像差(FFA)和NSC矢高图。(联系我们获取文章附件)
在第一部分中,我们主要介绍了如何以逆向方式对于HUD系统进行建模,下一步我们将根据分析系统的初始性能,并结合具体设计指标了解如何对系统进行控制与优化。
初始性能
增加系统像差的因素是风挡玻璃,我们可以对于像差进行分析。
该系统可以简化为来自无穷远处(眼睛)的光,并被风挡玻璃反射;反射后,点列图可以告诉我们在“真实”风挡玻璃和理想风挡玻璃(平面镜)的情况下的光线角度。
以下是定义文件的不同步骤:
·忽略表面6至11;
·将视场类型转换为角度;
·将“物面厚度”值设置为“无限”;
·在风挡玻璃后面添加一个标准表面,作为理想平面风挡玻璃的模型。将材质设置为“MIRROR”。在“Surface 4 Properties”的“Aperture”下,从“Surface 3”中拾取“Aperture”;
·创建两种多重结构:一种带有“真正”风挡玻璃,另一种带有理想的平面反射风挡玻璃(表面3和4);
·勾选System Explorer…Aperture下的Afocal Image Space,设置单位为角度。
这些修改可以在“HUD_Step1_windshield_aberration.zar” 文件中找到:

要分析风挡玻璃引入的像差,请单击 Analyze…Aberrations…Full Field Aberration。塞德尔像差工具在此不适用,因为它只描述旋转对称系统中的三阶像差。
全视场像差分析计算波前的Zernike分解项,并显示整个视场的Zernike系数。
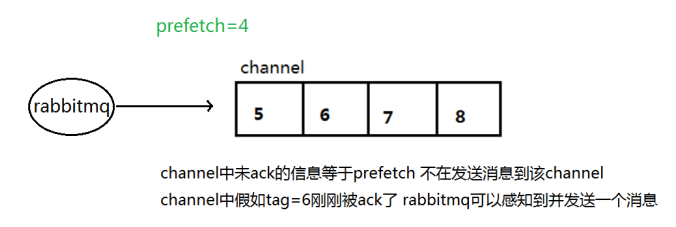
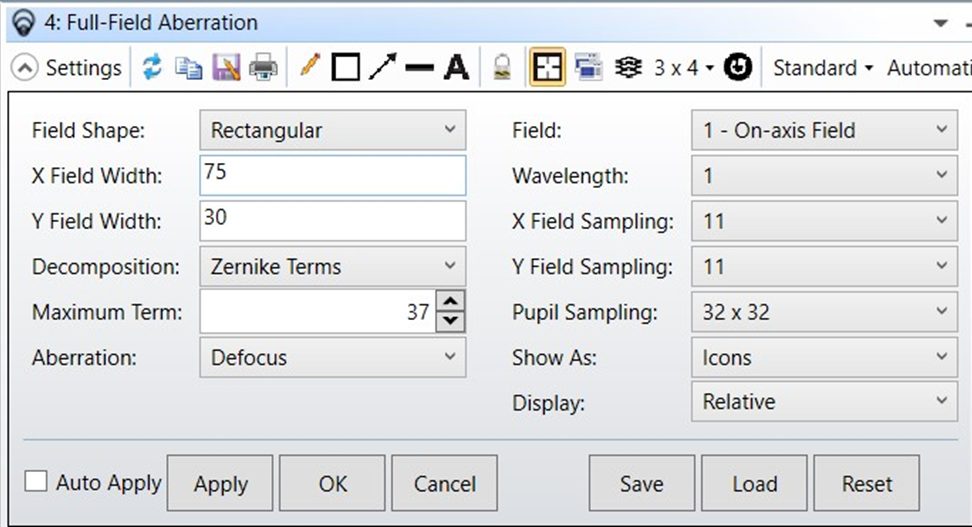
整个视场由红色方框的设置定义:

以下是这些视场点的表示:以下是这些视场点的表示:

对于每个视场点,软件将波前拟合为一系列Zernike标准多项式,就像在Analyze…Wavefront…Zernike Standard Coefficients下所做的那样。以下设置定义了需要显示的Zernike像差项:

在像差下,根据Zernike标准项5(Z5)和Zernike标准项6(Z6)计算初级像散:

初级像散定义为:
·Magnitude = sqrt (Z5^2 + Z6^2)
·Angle = (1/2)*atan2(y = -Z5 , x = -Z6)
这里,atan2是C语言函数,它给出了(y/x)的反正切。
如果“显示”设置为“图标”,则线的长度将给出大小,方向将给出角度。
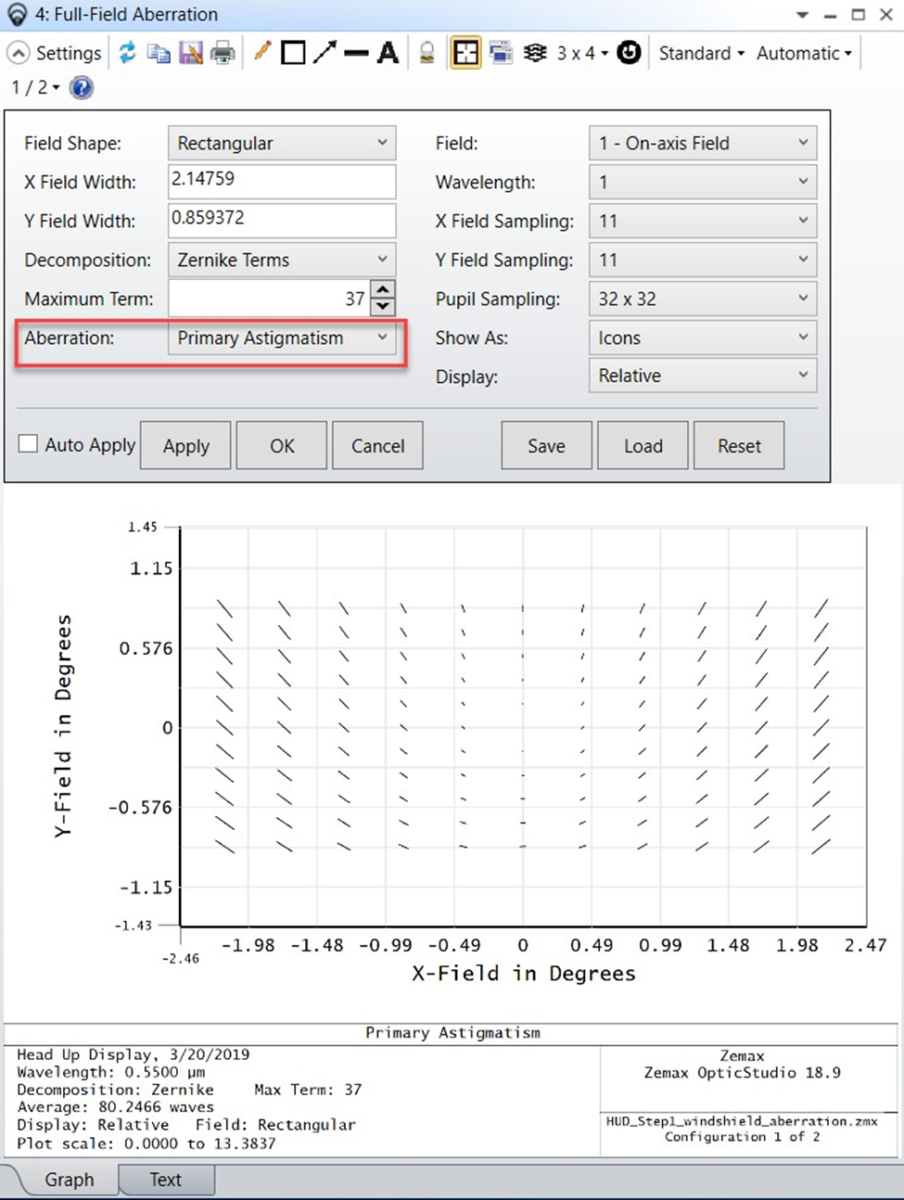
在框架的下方是所选像差的显示范围,这里则为全视场的初级像散。
这个系统的结果为:
1.离焦:174.4 waves
2.初级像散:平均为80.2 waves
可以看出,该系统最初受到风挡玻璃带来的像散限制,光束也会被风挡玻璃稍微聚焦。但是离焦值不是问题,因为设计会将光束聚焦到LCD显示器上。HUD的设计将从校正像散开始。
建立评价函数
回到我们的原始文件“HUD_Step1_StartingPoint.zar”,自由曲面反射镜现在可以进行优化,以校正风挡玻璃引入的像差。首先,“优化”下的“快速调整”工具可以用来使我们的自由曲面镜成为球面镜。这是一个很好的起点。

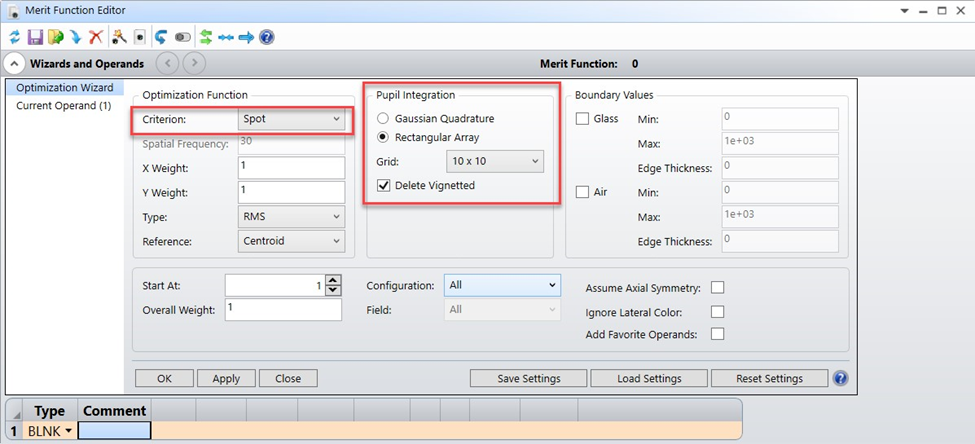
建立一个默认的评价函数:
可以构建默认的评价函数来优化最小的光斑尺寸(RMS点)。该系统包含孔径,因此将使用矩形阵列方式对光瞳进行采样。
这里可以使用全视场像差来检查视场采样。视场上像差的快速变化可能意味着需要更多的视场点。
然后,可以手动添加其他指标,其中手动添加的操作数位于评价函数的顶部:
·放大率:一个规格是关于放大率。可以添加REA*(真实光线坐标)操作数,以检查LCD显示器上光线X和Y的位置。DIVI操作数可用于计算放大率(像面上的主光线高度与物面上的比率)。将在这些DIVI操作数上放置10的权重因子。


·畸变:最后一个规格是关于畸变。它必须低于2%。
像畸变这样的近轴计算并不总是能很好地处理具有坐标间断的非对称系统。使用畸变操作数时,请始终验证结果是否合理。可以使用CENX和CENY对视场的四个视场角(视场2至5)手动检查和/或计算质心的位置。

评价函数现已准备就绪。在优化之前,可以将自由曲面反射镜从标准面更改为自由曲面;这里是一个Zernike标准矢高曲面,有11项。
Zernike多项式非常适合优化,但它们可能需要转换回标准多项式,如用于制造的扩展多项式。
Zernike曲面的归一化半径设置为大于半直径的固定值。在优化过程中,如果该半径不是固定的,则每次更新时,都会在优化期间在评价函数上产生一些变动。

优化之前的文件称为“HUD_Step1_MF_before_optim.zar”。
·变量:
Z1是Piston项;它不会被使用。
Z2和Z3是倾斜项。LCD显示器等元件的不同位置是固定的,因此不会使用倾斜项。
系统包含两个变量:后焦距的长度,自由曲面反射镜的曲率半径。
在进行第一次局部优化后,可以检查全视场像差:

整个视场的平均值:
Z4是离焦/场曲,并设置为变量。
Z5和Z6是主初级像散,并且设置为变量。
优化后,整个视场的平均值为:

Z7和Z8是初级彗差,并且设置为变量。
Z9和Z10是彗差,并且被设置为变量。
Z11是平衡的初级球差,并且被设置为变量。
然后是一分钟的Hammer优化:

优化后的文件称为“HUD_Step1_MF_after_opti.zar”。
优化结果
优化的结果可以看出,该系统尚未翻转,因此性能不是“真实”性能,而是“翻转”性能。
·光斑大小(RMS):光斑的RMS半径低于200微米。它没有提供太多信息;当系统翻转时,检查角度大小将更令人感兴趣。
·像散与彗差:可以再次检查全视场像差,以查看优化是否降低了初级像散。除了像散之外,最有可能影响HUD成像质量的Zernike项是彗差和球差。用于以下结果的视场是总视场,它表示驾驶员看到的最大角度范围,允许头部在HUD眼盒内垂直和水平移动。它还显示了两只眼睛所看到的视差。
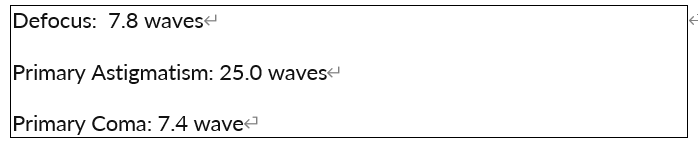
整个视场的平均值为:

像散的范围从80减少到11 waves。下图使用的是相对比例(显示设置),从绝对值中减去平均值。它可以更好地了解整个视场的像差变化:



· 畸变:略高于2%