在osgEarth操控器类的EarthManipulator中的如下函数:
void EarthManipulator::setLookAt(const osg::Vec3d& center,
double azim,
double pitch,
double range,
const osg::Vec3d& posOffset)
{
setCenter( center );
.... // 其它代码略
}
void EarthManipulator::setCenter( const osg::Vec3d& worldPos )
{
_center = worldPos;
createLocalCoordFrame( worldPos, _centerLocalToWorld );
.... // 其它代码略
}如上代码在osgEarth操控器EarthManipulator类的setLookAt函数调setCenter函数设置相机视点看向的位于地球上的某焦点区域的中心_center。_center是世界坐标系表示的点,也即是地心地固坐标系表示的点。setCenter函数调用createLocalCoordFrame函数,其代码如下:
bool
EarthManipulator::createLocalCoordFrame( const osg::Vec3d& worldPos, osg::CoordinateFrame& out_frame ) const
{
if ( _srs.valid() )
{
osg::Vec3d mapPos;
_srs->transformFromWorld( worldPos, mapPos );
_srs->createLocalToWorld( mapPos, out_frame );
}
return _srs.valid();
}
其中:
_srs->transformFromWorld( worldPos, mapPos );是将地心地固坐标系表示的点worldPos转为经度、纬度、高程坐标系(一般为WGS84)下的点,并保存到mapPos变量中。按上面的调用流程来看,就是将_center转为经纬度、高程坐标系下的坐标,并保存到mapPos变量中。如下代码:
_srs->createLocalToWorld( mapPos, out_frame );将mapPos变即最开始的_center转为经纬度高程后的坐标再转为out_frame。上述createLocalToWorld函数到底是干什么用的呢?断点跟踪到底层代码:
bool
SpatialReference::createLocalToWorld(const osg::Vec3d& xyz, osg::Matrixd& out_local2world ) const
{
if (!valid())
return false;
if ( isProjected() && !isCube() )
{
....// 其它代码略
}
else if ( isGeocentric() )
{
....// 其它代码略
}
else
{
// convert to ECEF:
osg::Vec3d ecef;
if ( !transform(xyz, getGeocentricSRS(), ecef) )
return false;
// and create the matrix.
out_local2world = _ellipsoid.geocentricToLocalToWorld(ecef);
}
return true;
}在else语句中又将经纬度、高程坐标系下的_center转回地心地固坐标,接下来通过geocentricToLocalToWorld将这个地心地固坐标下的_center进行转换:
osg::Matrix
Ellipsoid::geocentricToLocalToWorld(const osg::Vec3d& geoc) const
{
osg::Matrix m;
EM.computeLocalToWorldTransformFromXYZ(geoc.x(), geoc.y(), geoc.z(), m);
return m;
}发现上述代码调用了osg里面的函数:
inline void EllipsoidModel::computeLocalToWorldTransformFromXYZ(double X, double Y, double Z, osg::Matrixd& localToWorld) const
{
double latitude, longitude, height;
convertXYZToLatLongHeight(X,Y,Z,latitude,longitude,height);
localToWorld.makeTranslate(X,Y,Z);
computeCoordinateFrame(latitude, longitude, localToWorld);
}这个函数前面很简单:又将地心地固坐标的_center转成经纬度、高程坐标系坐标;这个函数后面断点跟进去如下:
inline void EllipsoidModel::computeCoordinateFrame(double latitude, double longitude, osg::Matrixd& localToWorld) const
{
// Compute up vector
osg::Vec3d up ( cos(longitude)*cos(latitude), sin(longitude)*cos(latitude), sin(latitude));
// Compute east vector
osg::Vec3d east (-sin(longitude), cos(longitude), 0);
// Compute north vector = outer product up x east
osg::Vec3d north = up ^ east;
// set matrix
localToWorld(0,0) = east[0];
localToWorld(0,1) = east[1];
localToWorld(0,2) = east[2];
localToWorld(1,0) = north[0];
localToWorld(1,1) = north[1];
localToWorld(1,2) = north[2];
localToWorld(2,0) = up[0];
localToWorld(2,1) = up[1];
localToWorld(2,2) = up[2];
}可以看出,上面这个函数就是生成了一个旋转矩阵,再结合上面的那个平移的代码:
localToWorld.makeTranslate(X,Y,Z);可以看出,生成的这个矩阵是一个旋转平移矩阵。而且是先旋转,后平移。 上面坐标结合下图很容易理解:
图1 坐标转换图
经过这么多转换后,_center向东、向北,向天方向的姿态就出来了,如下:
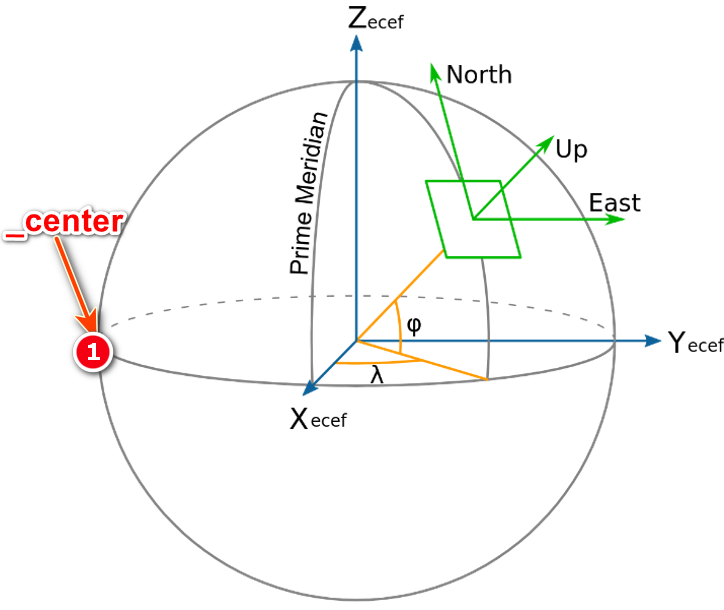
图2 ECEF、ENU、BLH坐标系
淡绿色坐标系为东北天(ENU)坐标系,经过这么多次转换后,_center就相当于三个淡绿色坐标系的原点(说明:在osgEarth操控器中,程序初始流程刚进入时,_center其实是位于图2中的1位置处,即地心地固坐标系Y轴负半轴和赤道圆交点处,这里为了便于观察,将ENU放到易于观察的角度了)。另外:图2中灰色的X、Y、Z轴表示的地心地固坐标系(ECEF),桔黄色表示的是经纬度坐标系(BLH)。
地心地固坐标系和ENU坐标系之间的换算,可以参考如下博文:
地心地固坐标系(ECEF)与站心坐标系(ENU)的转换。
参考链接:








![[LeetCode复盘] LCCUP‘23春季赛组队赛 20230507](https://img-blog.csdnimg.cn/fead894ce17e4bacbc04ee25ddfd7bd6.png)


