一、前言
此示例演示如何使用方案查看器可视化系统级仿真。
二、介绍
相控阵系统仿真通常包括许多移动物体。例如,阵列和目标都可以处于运动状态。此外,每个移动物体可能都有自己的方向,因此当模拟中出现更多玩家时,簿记变得越来越具有挑战性。
相控阵系统工具箱™提供了一个场景查看器,有助于可视化雷达和目标在空间中的移动情况。通过场景查看器,可以跟踪每个移动平台的轨迹并检查雷达和目标之间的相对运动。
三、可视化轨迹
在第一个示例中,方案查看器用于可视化雷达和目标的轨迹。假设雷达在 3 公里外的原点周围盘旋。带有雷达的飞机以250米/秒(约560英里/小时)的速度飞行,大约每60秒绕一圈。
目标沿着一条笔直的道路行驶,沿 x 轴的速度为 30 m/s,约为 67 英里/小时。
查看器设置为每 0.1 秒更新一次。对于最简单的情况,光束不会显示在查看器中。
此代码模拟并显示雷达和目标的轨迹。

四、可视化轨迹和雷达波束
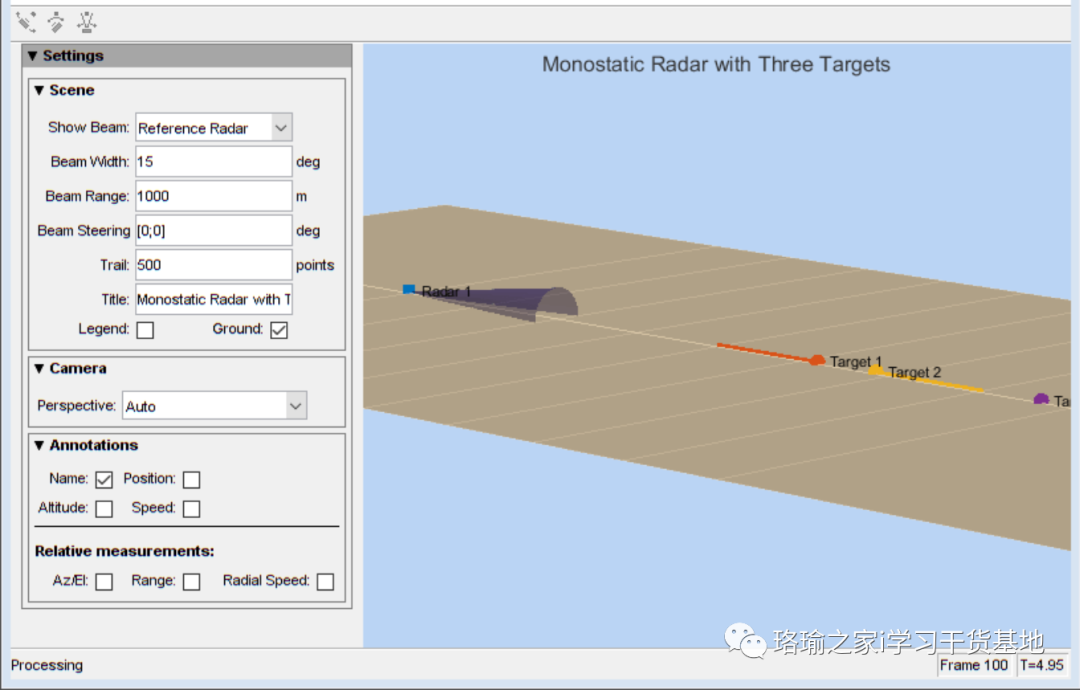
下一个自然步骤是将天线阵列波束与观察器中的轨迹一起可视化。以下示例演示如何可视化在空间中移动的两个雷达和三个目标。特别是,第一雷达具有跟踪第一目标的波束。
首先,设置雷达和目标。请注意,第一个雷达和第一个目标与上一节中使用的目标匹配。
为了正确指向波束,场景查看器需要知道雷达和目标的方向信息。通过在每个模拟步骤中将 OrientationAxesOutputPort 属性设置为 true,可以从这些移动平台获取此类信息,如上面的代码所示。若要将此信息传递给查看器,请将方案查看器的 OrientationInputPort 属性设置为 true。
请注意,显示的光束宽度为 5 度,长度为 3 公里。相机视角也进行了调整,以更清晰地显示所有轨迹。

五、系统仿真可视化
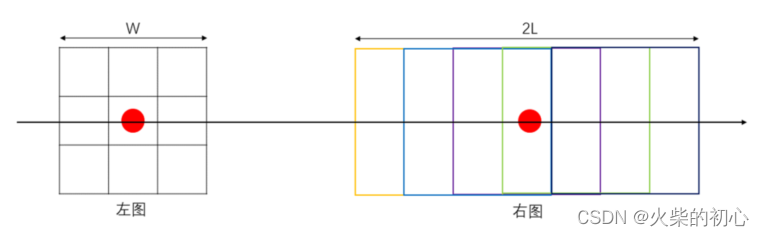
场景查看器还可以与其他可视化结合使用,以提供模拟系统的更多信息。下一个示例将方案查看器与距离时间强度 (RTI) 范围和多普勒时间强度 (DTI) 范围一起使用,以便工程师可以检查目标的估计范围和范围速率是否与实际值匹配。
考虑有三个目标的场景。一旦回波到达接收器,就会使用匹配滤波器和脉冲积分器来执行距离估计。由于无需以脉冲重复率监控轨迹,因此此示例假设系统以 20 Hz 的速率读取雷达测量值。该示例使用场景查看器来监视场景,并使用距离时间强度 (RTI) 图以及多普勒时间强度 (DTI) 图来检查估计的范围和范围速率值。
下一节将执行系统仿真并生成可视化效果。

场景查看器和RTI都在仿真过程中更新,因此可以轻松验证仿真是否按预期运行,以及距离估计是否与仿真运行时的地面实际情况相匹配。
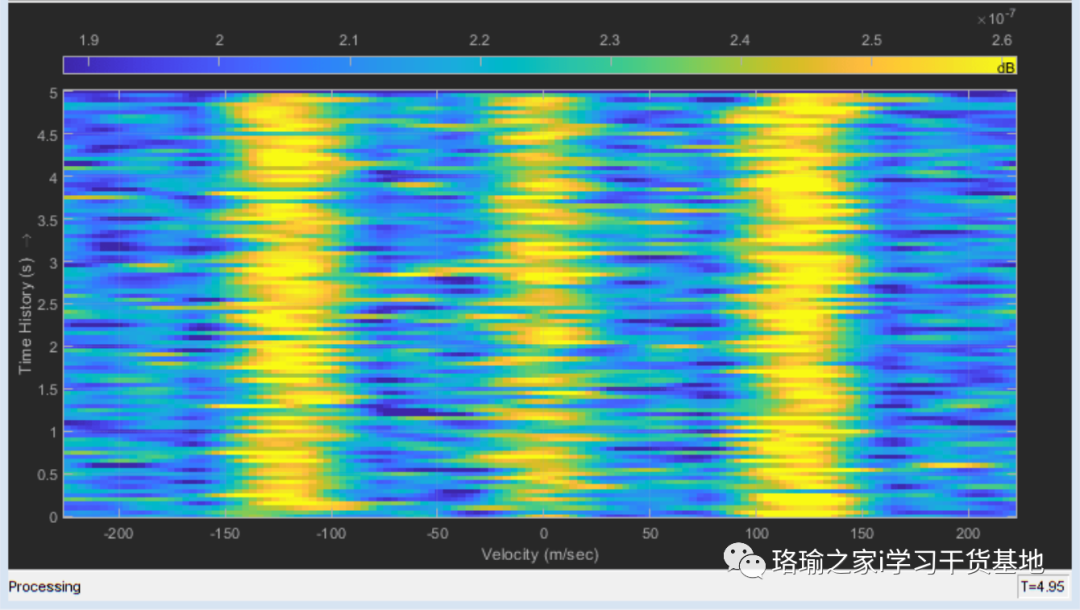
同样,提供了每个目标的范围率估计数。
六、结论
此示例描述了可视化雷达和目标轨迹的不同方法。这种可视化有助于提供系统动态的整体情况。
七、程序
使用Matlab R2022b版本,点击打开。(版本过低,运行该程序可能会报错)
打开下面的“XXX.m”文件,点击运行,就可以看到上述效果。
程序下载:https://download.csdn.net/download/weixin_45770896/87666431