毫米波雷达系列 | 传统CFAR检测(均值类)
文章目录
- 毫米波雷达系列 | 传统CFAR检测(均值类)
- 1.CA-CFAR算法
- 2.SO-CFRA算法
- 3.GO-CFAR算法
- 4.仿真对比
CFAR检测器主要用于检测背景杂波环境中的雷达目标,常见的均值类CFAR检测器包括单元平均检测器(CA-CFAR)、选择最大检测器(GO-CFAR)、选择最小检测器(SO-CFAR)。
CFAR检测器的性能取决于窗口的大小和形状,以及阈值的设置。通常,选择合适的窗口和阈值需要进行大量的实验和测试,以便在各种条件下获得最佳性能。
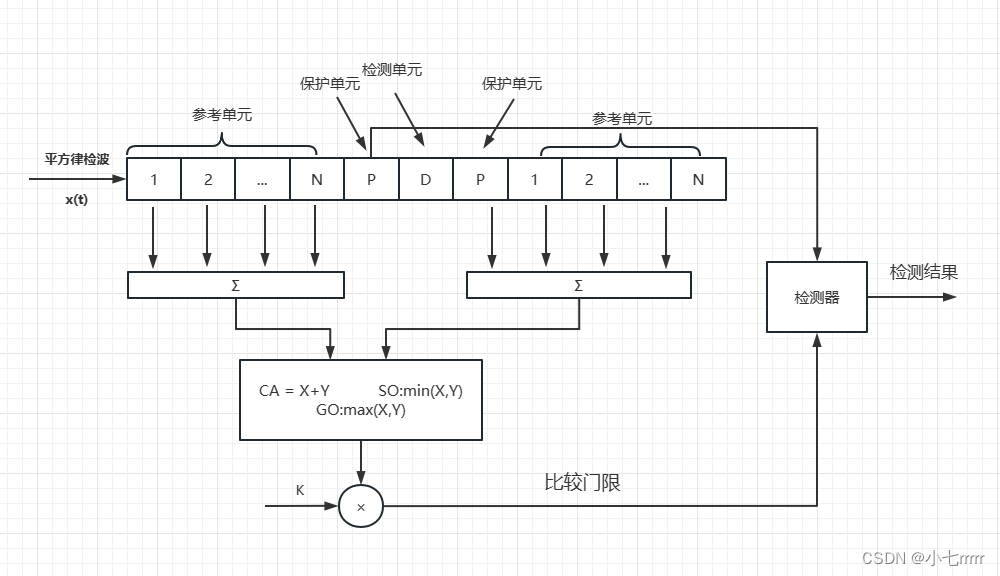
CFAR检测器将窗口分为三类:参考单元、保护单元和检测单元。
其中参考单元用来估算背景杂波功率值,保护单元用来防止检测单元的能量泄漏到参考单元。
1.CA-CFAR算法
CA-CFAR 是指,在待检测单元两侧各取 N 个参考单元,计算总共2N 个参考单元的平均值,当作背景杂波功率估计值 Zca。所以待检测单元 D 两侧参考单元计算表达式为:
Z
c
a
=
(
X
+
Y
)
/
2
=
1
2
N
(
∑
i
=
1
N
x
i
+
∑
i
=
1
N
y
i
)
Zca = (X+Y)/2=\frac{1}{2N}(\sum_{i=1}^{N}{x_i}+\sum_{i=1}^{N}{y_i})
Zca=(X+Y)/2=2N1(i=1∑Nxi+i=1∑Nyi)
将背景杂波功率估计值 Zca乘以门限乘积因子k,就得到待检测单元D的门限值S。
S
=
k
Z
c
a
=
k
2
N
(
∑
i
=
1
N
x
i
+
∑
i
=
1
N
y
i
)
S=kZca=\frac{k}{2N}(\sum_{i=1}^{N}{x_i}+\sum_{i=1}^{N}{y_i})
S=kZca=2Nk(i=1∑Nxi+i=1∑Nyi)
2.SO-CFRA算法
SO-CFAR 是指,对参考单元分别计算其平均值 X 和Y,并选取X 和Y中平均值较小的当作待检测单元D的背景杂波功率估计值 Zso。
Z
s
o
=
m
i
n
(
X
,
Y
)
Zso=min(X,Y)
Zso=min(X,Y)
X = ∑ i = 1 N x i X=\sum_{i=1}^{N}{x_i} X=i=1∑Nxi
Y = ∑ i = 1 N y i Y=\sum_{i=1}^{N}{y_i} Y=i=1∑Nyi
检测门限S可以表示为:
S
=
k
Z
s
o
S=kZso
S=kZso
3.GO-CFAR算法
GO-CFAR 是指,对参考单元分别计算其平均值 X 和Y,并选取 X 和Y中平均值较大的当作待检测单元 D 的背景杂波功率估计值 ZGO。
Z
g
o
=
m
a
x
(
X
,
Y
)
Zgo=max(X,Y)
Zgo=max(X,Y)
检测门限S可以表示为:
S
=
k
Z
g
o
S=kZgo
S=kZgo
4.仿真对比
在均匀杂波环境、多目标环境和杂波边缘环境中对均值类CFAR检测器的性能进行比较分析。
参数设置:
| 虚警概率 | 10-4 |
|---|---|
| 参考单元 | 32 |
| 保护单元 | 4 |
| 信噪比SNR | 20 |
| 多目标单元位置 | 110和120 |
| 杂波边缘功率 | 20dB、30dB |
1)均匀背景
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-iCOpqqyN-1683428305173)(D:\学习\毫米波雷达实验代码整理版本\CFAR算法仿真代码\CM-VI-OS-ML算法在多目标检测中性能对比\CA-GO-SO均匀杂波环境下单目标检测.png)]](https://img-blog.csdnimg.cn/2f3151985030499aab1b36f518e37a70.png)
2)多目标
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-ehnjEsxm-1683428305174)(D:\学习\毫米波雷达实验代码整理版本\CFAR算法仿真代码\CM-VI-OS-ML算法在多目标检测中性能对比\CA-GO-SO均匀环境下双目标的遮蔽效应.png)]](https://img-blog.csdnimg.cn/bf01825d339d4d7894cc5f08d7229206.png)
3)杂波边缘环境
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-uBu8F6Pn-1683428305174)(D:\学习\毫米波雷达实验代码整理版本\CFAR算法仿真代码\CM-VI-OS-ML算法在多目标检测中性能对比\CA-GO-SO边缘杂波环境下漏检问题.png)]](https://img-blog.csdnimg.cn/3ec2e45251034fc8bfc5eaf56f2158f8.png)
三种均值类检测器在均匀环境中都可以在第110个距离单元检测出目标,三种检测器的性能基本无差异;
在多目标环境中,可以看到只有SO-CFAR成功将两个目标检测到,而CA-CFAR和GO-CFAR对第110个距离单元的目标漏检。第120个距离单元的目标为信噪比较强的信号,在运算的过程中加入到了参考单元中,使得整个背景杂波功率估计值变高,因此检测门限提高,从而导致了漏检。SO-CFAR检测器采取的策略是选择小的背景功率估计值,所以可以将两个目标都检测到;
在杂波边缘环境中,在第100个距离单位处的目标只有GO-CFAR算法检测成功,CA-CFAR和SO-CFAR均出现了漏检现象,说明GO-CFAR在杂波边缘环境下的虚警能力控制更强
clc;
close all;
clear all;
%% 均匀背景噪声(单目标&多目标)
clear
close all;
shape=200;
variance=200;
noise_db=20;
noise_p=10.^(noise_db./10);%噪声的实际功率
show_out=0;
[ xc ] = env_uniform(variance, shape, noise_db,show_out);% 产生信号
% 多目标
locatsite=[80,110,120];
% SNR1=12;signal1_p=10.^(SNR1./10).*noise_p(1,end);
SNR2=15;signal2_p=10.^(SNR2./10).*noise_p(1,end);
SNR3=18;signal3_p=10.^(SNR3./10).*noise_p(1,end);
% xc(1,locatsite(1))=signal1_p;
xc(1,locatsite(2))=signal2_p;
xc(1,locatsite())=signal3_p;
trgt = zeros(length(locatsite),2);
% trgt(1,:) = [locatsite(1),signal1_p];
trgt(2,:) = [locatsite(2),signal2_p];
trgt(3,:) = [locatsite(3),signal3_p];
%% 算法结果&图谱显示
N=32;
pro_N=4;
PAD=10^(-4); % 虚警概率
% xc为信号;pro_N为保护单元;PAD为虚警概率
% XT为CFAR的检测门限
[ XT_CA ] = cfar_ac( abs(xc), N, pro_N, PAD);%计算CACFAR
[ XT_GO ] = cfar_go( abs(xc), N, pro_N, PAD);%计算CACFAR
[ XT_SO ] = cfar_so( abs(xc), N, pro_N, PAD);%计算CACFAR
plotNum=20;
markersize=5;
LineWidth=1.25;
len=length(xc);
figure;
plot(10.*log(abs(xc))./log(10),'LineWidth',LineWidth),hold on;
plot(10.*log(abs(XT_CA))./log(10),'g-+','MarkerIndices',1:plotNum:len),hold on;
plot(10.*log(abs(XT_GO))./log(10),'r-*','MarkerIndices',30:plotNum:len),hold on;
plot(10.*log(abs(XT_SO))./log(10),'b-^','MarkerIndices',60:plotNum:len),hold on;
trgtFlag = exist('trgt','var') ;
if trgtFlag%有无目标点
plot(trgt(:,1),10.*log(abs(trgt(:,2)))./log(10),'s','Color',[1 0 1],'MarkerSize',markersize),hold on;
end
title('CA-GO-SO-CFAR处理效果图');
xlabel('频谱单元');ylabel('幅度/dB');
legend('信号','CA-CFAR','GO-CFAR','SO-CFAR','目标点','Location','SouthEast');
% 均匀背景
function [ xc ] = env_uniform(variance, shape, power_db, show_out)
if (nargin==3)
show_out=0;
end
c=10^(power_db/10); % 这里是幅度——功率,实际的噪声功率
xc=c + random('Normal',0,variance,1,shape);%产生一个正态分布/高斯分布的噪声,期望为0,标准差为200,1*200的矩阵
if show_out==1
figure;plot(10.*log(abs(xc))./log(10));
end
end
% 杂波背景
function [ xc ] = env_edge(variance, shape, power_db, show_out)
if (nargin==3)
show_out=0;
end
c=10.^(power_db./10); % 这里是幅度——功率
xc=random('Normal',0,variance,1,shape(1,end)); % 正常分布 期望为0 方差为200 1*2矩阵
xc(1,1:end)=xc(1,1:end)+c(1,1);% 前面20
index=1;
for i=1:length(power_db)
xc(1,index:shape(1,i))=xc(1,index:shape(1,i)).*c(1,i)./c(1,1);
index=shape(1,i)+1;
end
if show_out==1
figure;plot(20.*log(abs(xc))./log(10));
end
end