warning: 本文仅为个人思考,非常不严谨甚至可能会出现严重错误,请读者仔细甄别,若本文真的存在严重错误,恳请评论区纠正,我看到将会考虑修改或者删除文章
纯比例控制存在稳态误差是由其本质(控制逻辑?)决定的
以极端例子纯增益系统G(s)=1为例(该系统输出完全等于输入)
当比例增益太小时,系统会存在稳态误差,假设Kp=0.5,要调节的目标值是1,初始值为0,则
第一次计算:
e
=
1
−
0
=
1
e=1-0=1
e=1−0=1
u
=
K
P
∗
e
=
0.5
u=K_P*e=0.5
u=KP∗e=0.5
第二次计算:
e
=
1
−
0.5
=
1
e=1-0.5=1
e=1−0.5=1
u
=
K
P
∗
e
=
0.25
u=K_P*e=0.25
u=KP∗e=0.25
(还没到目标值甚至还降下来了,这时候比例环节就非常反常识)
第二次计算:
e
=
1
−
0.5
=
1
e=1-0.5=1
e=1−0.5=1
u
=
K
P
∗
e
=
0.25
u=K_P*e=0.25
u=KP∗e=0.25
(还没到目标值甚至还降下来了,这时候比例环节就非常反常识)
第三次计算:
e
=
1
−
0.25
=
0.75
e=1-0.25=0.75
e=1−0.25=0.75
u
=
K
P
∗
e
=
0.327
u=K_P*e=0.327
u=KP∗e=0.327
(这次计算重新升上去了,但是甚至还不如第一次计算靠目标值近)
后面的计算以此类推 ,如下图所示
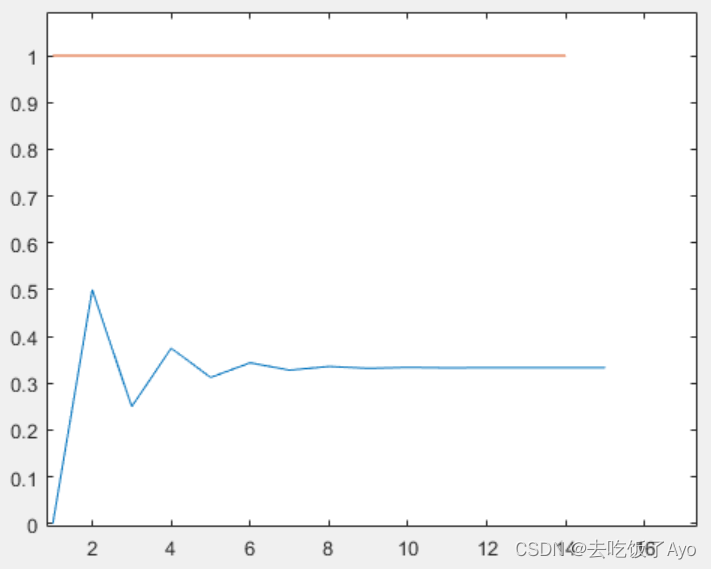
纯比例控制的控制逻辑似乎就不是控制输出到目标值。
说到比例控制,可能会想到这个下图
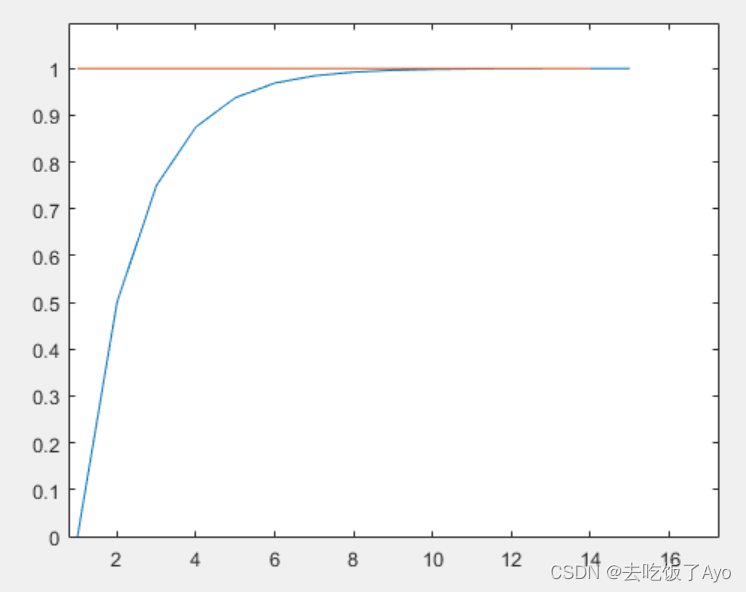
但这并不是位置式PID的纯比例控制
位置式的纯比例控制公式为
u
=
K
P
∗
e
u=K_P*e
u=KP∗e
而上图的公式为
Δ
u
=
K
∗
e
\Delta{u}=K*e
Δu=K∗e
这是增量式PID的积分部分,甚至不是PID,PID不可能只有积分项而没有比例项目
u
(
t
)
=
K
P
(
e
(
t
)
+
1
T
I
∫
0
t
e
(
τ
)
d
τ
+
T
D
d
e
(
t
)
d
t
)
u\left(t\right)=K_P\left(e\left(t\right)+\frac{1}{T_I}\int_{0}^{t}{e\left(\tau\right)d\tau+T_D\frac{de\left(t\right)}{dt}}\right)
u(t)=KP(e(t)+TI1∫0te(τ)dτ+TDdtde(t))
K
I
=
K
P
T
I
K_I=\frac{K_P}{T_I}
KI=TIKP
总结
纯比例环节稳态误差是由其本质决定的,其只能迅速缩小误差。如果 K P K_P KP过小,则不能消除稳态误差,如果加大 K P K_P KP会导致系统不稳定,所以纯比例环节不能消除稳态误差。








![[架构之路-191]-《软考-系统分析师》-8-软件工程 - 解答什么是面向功能的结构化程序设计:算法+数据结构 = 程序](https://img-blog.csdn.net/20150520193305178?watermark/2/text/aHR0cDovL2Jsb2cuY3Nkbi5uZXQvc2luYXRfMjYzNDIwMDk=/font/5a6L5L2T/fontsize/400/fill/I0JBQkFCMA==/dissolve/70/gravity/Center)