源自:航空科学技术
作者:赵俊 吴宝锋 徐盛果 孙小菡
摘 要
面向航空智能制造大批量数据采集与传递的实时性要求,提出一种基于异步光分组交换(optical packet switching,OPS)技术的具有多级管理能力的边缘计算系统方案,满足多源、海量、易构、分布式数据的实时采集、安全交互及预测性分析需求。提出一种基于循环光纤延时线(Rec-fiber delay lines,FDL)全光分组冲突解决机制,建立了系统的稳定性与时延分析模型,并完成仿真分析。结果表明,对于边缘计算节点规模为16385的系统,Rec-FDL冲突解决机制的分组平均最长等待时间为7.63ns,而传统数据重传(PRA)机制的时间为16.85ns。因此,Rec-FDL冲突解决机制能够在交换节点内部进行数据冲突的本地解决,它可避免PRA机制带来的路径时延,同时更有利于系统的扩展。
关键词
智能制造;边缘计算;光分组交换;稳定性;时延
航空智能制造是引领智能制造工业化发展的重要产业,是推动工业转型升级的引擎[1-2]。智能制造从宏观上将推动传统的标准化、大批量、刚性、缓慢的生产模式向个性化、高度柔性化、快速响应市场需求的生产模式转变,在微观上,将通过数字化、网络化、自动化和智能化的制造装备与系统集成,实现产品研制过程的全闭环控制。
随着航空智能制造过程中设备数量的迅速增加及海量数据的爆炸式增长,以云计算模型为核心的集中式大数据处理技术已经不能高效处理边缘设备所产生的数据,主要表现在从设备传输海量数据到集中式数据中心致使网络传输带宽的负载量急剧增加,造成较长的网络延迟[3]。为此,以边缘计算模型为核心的面向网络边缘设备所产生海量数据计算的边缘式大数据处理应运而生,其与现有以云计算模型为核心的集中式大数据处理相结合,可较好地解决航空智能制造大数据处理中所存在的诸多问题[4-6]。因此,如何构建航空智能制造场景下,适于海量、突发、易构、分布式业务特性,以及具备实时数据采集、传输、存储、分析能力的边缘计算系统及网络架构,成为需要解决的重中之重。
以传统铜线或无线传输为基础的数据传输链路的带宽及其能够承受的信号处理比特率已不能满足目前高速、大容量数据交互的需求。在互联网应用趋于宽带化的今天,光纤通信网络发挥着越来越重要的作用,更适用于海量及时延敏感类业务[7]。光互连方式从光交换的角度来看主要可以分为光线路交换(OCS)[8]、光突发交换(OBS)[9-10]和光分组交换(OPS)[11]。
OCS技术的静态及粗粒度特性降低了端口和链路的利用率,不能满足用户突发数据交换需求。采用OBS技术将数据组装成突发包进行传输,既可满足较大文件的传输对较高吞吐量的需求,又可满足较小命令的传输对较低时延的需求。但突发的组装会引入较大的突发装配时延,不能满足低时延的实时传输需求。
OPS技术具有容量大、交换灵活、速率和格式透明、粒度细、可配置、资源利用率高等特点,将OPS技术与波分复用(wavelength division multiplexing,WDM)技术相结合,可实现网络交换容量与传输容量的匹配,已成为下一带光网络实时、突发业务处理的核心技术。其中,异步OPS可以更灵活地满足随机突发业务的交换及处理需求。
基于此,本文面向航空智能制造等工业互联网大批量数据采集与传递的实时性要求,提出一种基于异步OPS技术的具有多级管理能力的分布式边缘计算系统方案,满足多源、海量、易构、分布式数据的实时采集、安全交互及预测性分析需求。针对航空智能制造低时延数据交互要求,提出一种就地化全光分组冲突解决机制,建立了系统的稳定性与时延分析模型,完成仿真分析。
1 基于异步OPS的航空智能制造系统方案
1.1 系统架构
图1为提出的基于异步OPS的航空智能制造系统总体方案,由感知层、边缘层及应用层三层构成。

感知层由各种航空工业现场设备、产品、物料,以及能够实时获取设备数据的传感器及数据采集器组成。整个感知层具有执行反馈功能,除了上传感知数据,还需要响应上层下达的各种控制指令。
边缘层由边缘计算网关(ECN)和光交换单元(OSU)组成,面向航空制造设备的分布式、异构特点,可提供本地化管理和实时分析、处理能力,能满足更灵活、广泛的设备接入需求,支持航空智能制造应用快速开发,提供云计算中心无法有效提供的低延时、位置感知及物联网安全策略。基于异步OPS的分布式边缘计算光交换网络,具备能够满足异步、变长分组突发交互需求的就地化全光冲突解决能力,以减小数据传输时延,提高系统资源的利用率。
应用层面向业务需求,整合边缘层各类资源数据与数据分析结果,全面感知生产过程要素,提供生产运营监控,工艺加工可视化分析,设备健康分析,生产排产优化,工艺及车间综合优化等功能,其与边缘层协同配合,可实现系统计算资源的动态协调和优化分配,满足全局性大数据处理及业务决策需求,进而最大化边缘计算和云计算的应用价值。
1.2 基于异步OPS的分布式边缘计算系统
本文提出的边缘计算系统采用全光、可扩展的分布式管理方案。各级边缘计算节点间采用密集波分复用(DWDM)技术互联,高速、突发业务以异步方式随机发送,可减小业务交换时延,避免大批量边缘计算节点互连时的同步困难。
图2为基于异步OPS及DWDM技术的分布式边缘计算系统架构。边缘计算主节点(ECN-M)带有n组边缘计算从节点(ECN-S),每组边缘计算从节点由m个ECN组成,因此,两级系统可实现n×m+1个ECN的互联。

ECN的光收发模块将组装好的数据包转换成光分组,每组边缘计算从节点的数据分别由波长λ1到λm信号承载,并通过阵列波导光栅(AWG)复用。ECN-M下行的数据则由波长λm+1信号承载。
OSU单元由环形器、1×m光分路器、可调谐光纤布拉格光栅(TFBG)及可调谐滤波器(TF)组成。光分组头提取模块(HEM)用于将光分组标签信息从光分组当中提取出来,并送往ECN进行处理,ECN根据标签信息产生控制信号,控制TF的滤波状态,进而将某个光分组选择出来,并送往一个或多个目的地,实现光组播。如果该从节点没有相应的目的地,或没有足够的可用资源,从节点的ECN则通过调节TFBG的反射波长,将分组经过Circulator交换到主节点,然后,主节点的ECN则根据系统中各个从节点的资源情况,将收到的分组下发到别的从节点。
1.3 Rec-FDL冲突解决方案
数据以异步、变长分组形式在节点处实现交换,相对于同步交换模式具有相对较大的冲突概率。常规基于重传的数据冲突解决机制会增加管理的复杂性,增大分布式系统的数据交换时延。
本文提出一种基于Rec-FDL的就地化全光数据冲突解决方案,如图3所示,由光耦合器、TF、AWG及光纤延时线组成。

Rec-FDL的1端口由Coupler分成两部分,其中一部分经过TF与2端口连接,另一部分经过一个多波长选择模块与4端口连接。其中,多波长选择模块由两个AWG分别完成复用及解复用功能,TF则完成波长选择功能。3端口同样经过多波长选择模块与TF单元分别与4端口及2端口相连。
如果没有冲突,分组可经过1→2链路送往2端口。而如果同时有多个数据选择同一个目标端口,ECN则根据各个分组的优先级别产生控制信号控制TF的滤波状态。优先级别最高的分组送往端口2,而优先级别低的冲突分组送往端口4,进而在FDL中循环,并按照固定的周期释放出来。
2 系统分析模型
2.1 稳定性分析模型
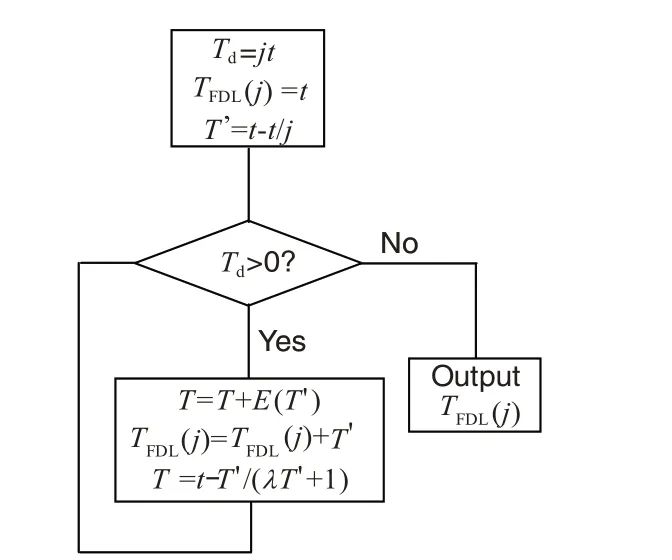
若在光收发模块接收时间t内产生j个分组,则冲突分组在Rec-FDL中的最长等待时延Td=jt。T表示一个冲突分组在Rec-FDL中循环一圈所需要的时间,T´表示前一个T时间段内最后一个冲突分组进入Rec-FDL以后,在随后的T时间内,可能产生新的分组的时间段。若T′时间段内产生分组,则Td会发生变化,变化量的平均值为:

式中:λ为分组的到达率。只有当Td不断减小,系统才能够保持稳定。因此,该分布式边缘计算系统的稳定性条件为E(T')<0。
2.2 时延分析模型
设Td减小为0所需时间为TFDL(j)。则分组在Rec-FDL中的平均最长等待时间为:

式中:P(j)为分组接收时间trec内,同时到达j个业务的概率,如式(3)所示:

TFDL(j)计算流程图如图4所示。每经过一个T'时间,Td减小量为E(T'),则Td减小为0所需的时间TFDL(j)为各个T'的总和。
3 仿真分析
针对Rec-FDL冲突解决机制仿真分析分布式边缘计算系统的阻塞率、稳定性和时延特性。仿真参数取m=64,t=51.2ns。图5为采用Rec-FDL方案解决分组冲突时,系统稳定性随λ变化示意图。E(T')<0时,其绝对值越大,分组最长等待时延减小的越快,系统越稳定。由于λ越大,同时到达光收发模块的分组越多,阻塞可能性增大,所以稳定性随λ的增大而降低。为保证系统稳定,λ的最大取值为30×106packets/s。

图6分析了Rec-FDL冲突解决机制的时延特性。TD会随着λ的增大而增 大,当λ从1×106packets/s增 加 到20×106packets/s时,TD由0.06ns增加到7.24ns。图6(b)分析了系统规模对分组等待时延的影响。可以看出,在λ=20×106packets/s时,当系统规模由5(m=2)个ECN增加到16385(m=128)个ECN时,TD的增量仅为1.3ns。
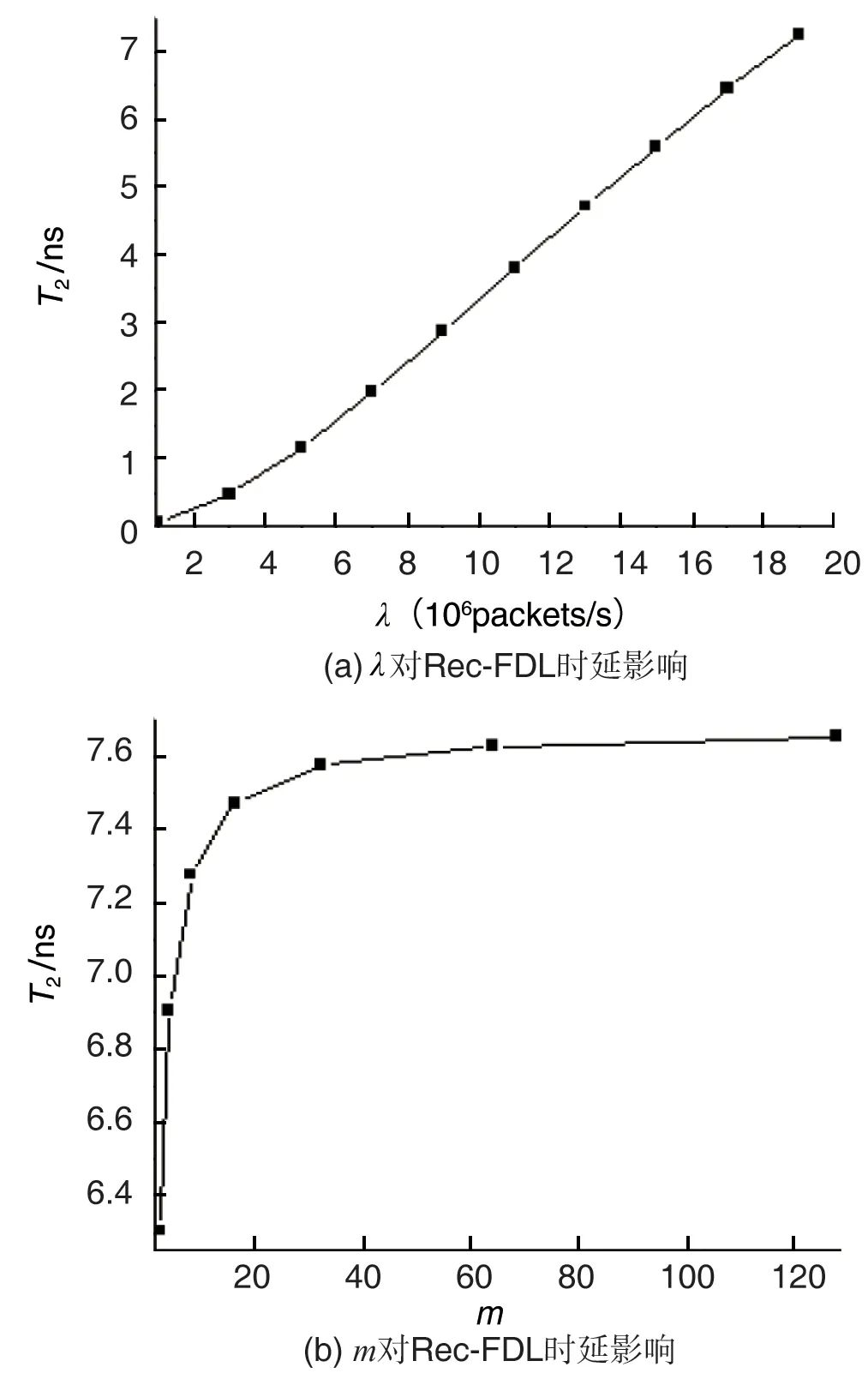
图7为PRA冲突解决机制的时延(TD2)分析。由图7(a)可以看出,当λ=20×106packets/s,在D=0时,TD2为8.0ns,而当D增至20m时,TD2增加至39.5ns。从图7(b)可以看出,当系统规模由5(m=2)个ECN增加到16385(m=128)个ECN时,分组等待时延TD2的增量为3.9ns。

采用PRA算法,ECN优先交换级别最高的分组,并将级别较低的冲突分组进行异步重传。如果一个分组被成功接收,目的节点将向源节点发送确认信号,于是,源节点发送新分组。显然,PRA冲突解决机制需要在系统中发送确认信号及进行旧分组的重传,会带来额外的路径时延。而Rec-FDL冲突解决机制能够在交换节点内部进行就地化冲突解决,因此,它具有更低的数据交换时延,同时更有利于系统的扩展。
4 试验测试
搭建了2×2异步OPS系统单节点示范试验平台,验证了基于异步OPS技术边缘计算系统的可行性。其中,ECN带有光口和5G接口,支持PLC采集,适配主流数控系统,满足航空智能制造应用需求。采用“10001”和“10100”分组脉冲序列(见图8)进行了异步分组交换测试。
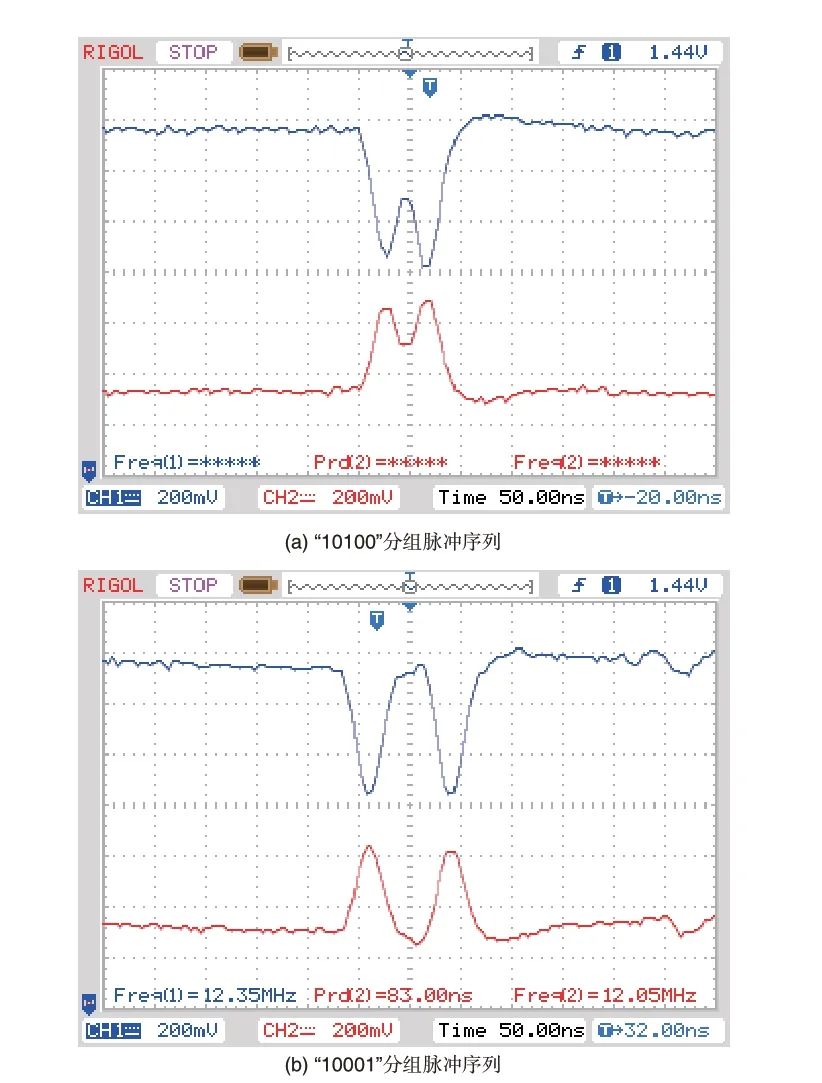
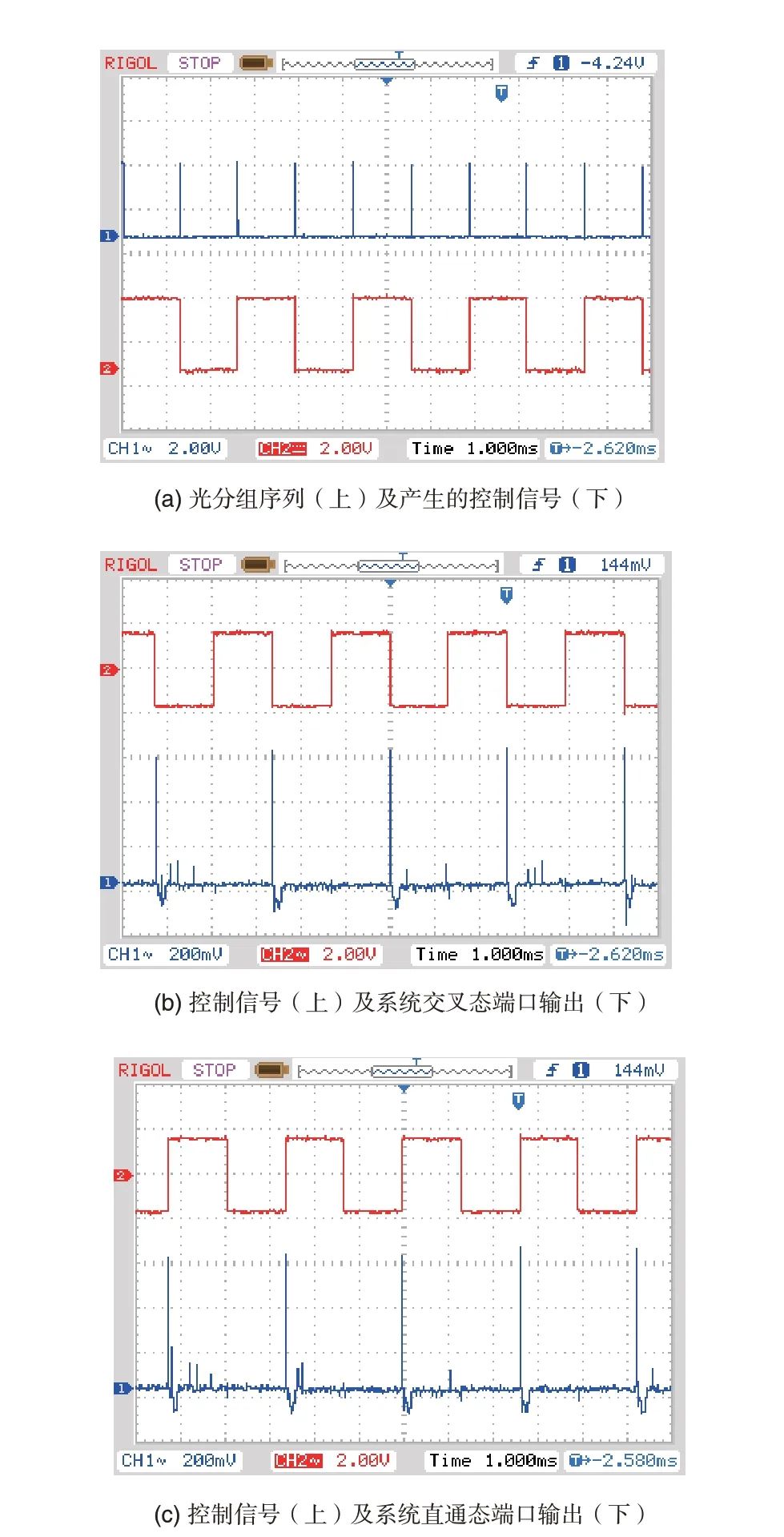
图9为光分组异步交换测试结果。ECN接收光分组头信息后进行计算分析,并产生控制信号,控制系统的交换状态。在控制信号的上升沿,系统为直通态传输,在下降沿,为交叉态传输。试验结果表明,在ECN的控制下,光分组能够被正确地交换至其目的节点,验证了基于异步OPS的分布式边缘计算系统的可行性。
5 结束语
面向航空智能制造大批量数据采集与传递的实时性要求,本文提出一种基于异步OPS技术的具有多级管理能力的边缘计算系统方案,满足多源、海量、易构、分布式数据的实时采集需求。提出一种基于Rec-FDL的全光分组冲突解决机制,建立了系统的稳定性与时延分析模型,并完成仿真分析。结果表明,Rec-FDL冲突解决机制能够在交换节点内部进行就地化冲突解决,因此具有更低的交换时延,更有利于系统的扩展。





![[架构之路-188]-《软考-系统分析师》-3-操作系统 - 图解页面替换算法LRU、LFU](https://img-blog.csdnimg.cn/af6b34e6092948f08e78ebfcf93ba33f.jpeg)