1 Introduction
1.1 定义
定义:
Dynamic: sequential or temporal component to the problem
Programming: optimising a program: a policy
核心思想:
将复杂问题拆解成简单子问题
1.2 Requirements for dynamic programming
- Optimal substructure
- principle of optimality applies
- optimal solution can be decomposed into subproblems
- overlapping subproblems
- subproblem会调用很多次
- solution需要存储起来和进行复用
- MDP 满足以下性质
- bellman 方程提供递归的分解
- value 函数存储和复用solutions
1.3 planning by dynamic programming
几种假设:
1)DP 假设对MDP可观测结果
2)for prediction

3)for control

1.4 动态规划的其他应用
- Scheduling algorithm
- String algorithms (e.g. sequence alignment)
- Graph algorithms (e.g. shortest path algorithms)
- Graphical models (e.g. Viterbi algorithm)
- Bioinformatics (e.g. lattice models)
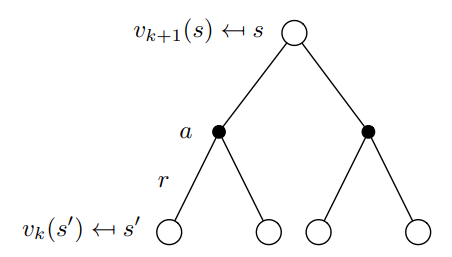
2 Policy Evaluation
动态问题的结构可以拆成下面三个部分:
state transition
s
n
=
f
(
s
n
−
1
,
a
n
)
value function
J
∗
(
s
)
=
min
a
∈
A
{
l
(
s
,
a
)
+
γ
∑
s
′
∈
S
P
(
s
′
∣
s
,
a
)
J
∗
(
s
′
)
}
policy
π
(
s
)
=
arg
min
a
{
l
(
s
,
a
)
+
γ
∑
s
′
∈
S
P
(
s
′
∣
s
,
a
)
J
∗
(
s
′
)
}
\begin{aligned} \text{state transition} & \quad s_{n} = f(s_{n-1}, a_{n}) \\ \text{value function} & \quad J^*(s) = \min \limits_{a\in A} \{l(s,a)+\gamma \sum_{s' \in S} P(s' | s, a) J^*(s')\} \\ \text{policy} & \quad \pi(s)=\arg\min \limits_{a} \{l(s,a)+\gamma \sum_{s' \in S} P(s' | s, a) J^*(s')\} \end{aligned}
state transitionvalue functionpolicysn=f(sn−1,an)J∗(s)=a∈Amin{l(s,a)+γs′∈S∑P(s′∣s,a)J∗(s′)}π(s)=argamin{l(s,a)+γs′∈S∑P(s′∣s,a)J∗(s′)}
代码的结构大概是这样的
```matlab
for state = 1:num_state
for action = 1:nun_action
Q = instaneous_cost(state, action);
next_state = transition(state, action);
Q = Q + J(next_state);
end
end
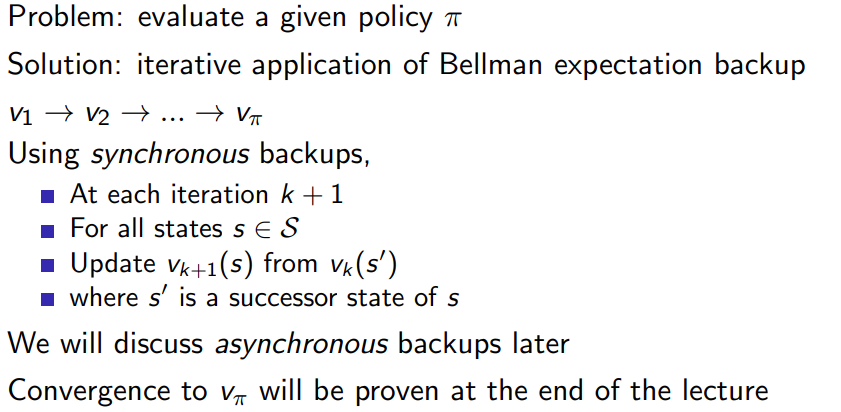
用iterative policy Evaluation 表示:

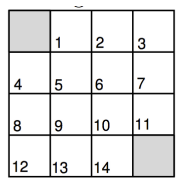
解决一个gridworld的问题,首先,我们定义一个简化的 4x4 网格世界,其中有四个可能的动作:向上、向下、向左、向右。在这个示例中,我们将使用均匀随机策略,即在每个状态下,每个动作的概率都相等。
% Initialize the grid world and parameters
grid_size = 4;
num_actions = 4;
discount_factor = 1.0;
theta = 1e-4;
% Initialize state-value function
V = zeros(grid_size);
% Define the reward function
reward = -1;
% Define the transition probabilities for the uniform random policy
policy = ones(grid_size, grid_size, num_actions) / num_actions;
% Iterative Policy Evaluation
while true
delta = 0;
% Loop over all states
for i = 1:grid_size
for j = 1:grid_size
% Skip the start and terminal states
if (i == 1 && j == 1) || (i == grid_size && j == grid_size)
continue;
end
% Store the old value
old_value = V(i, j);
% Calculate the new value by averaging over actions
new_value = 0;
for action = 1:num_actions
[next_i, next_j] = apply_action(i, j, action);
reward_next = (next_i == grid_size && next_j == grid_size) * (1 - discount_factor);
new_value = new_value + policy(i, j, action) * (reward + reward_next + discount_factor * V(next_i, next_j));
end
% Update the value function
V(i, j) = new_value;
delta = max(delta, abs(old_value - new_value));
end
end
% Check for convergence
if delta < theta
break;
end
end
% Apply the given action to the current state (i, j)
function [next_i, next_j] = apply_action(i, j, action)
grid_size = 4;
% Actions: 1 = up, 2 = down, 3 = left, 4 = right
if action == 1
next_i = max(i - 1, 1);
next_j = j;
elseif action == 2
next_i = min(i + 1, grid_size);
next_j = j;
elseif action == 3
next_i = i;
next_j = max(j - 1, 1);
else
next_i = i;
next_j = min(j + 1, grid_size);
end
end
3 policy Iteration
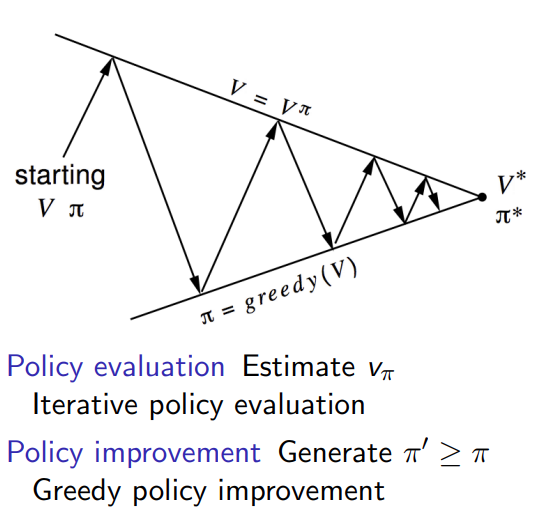
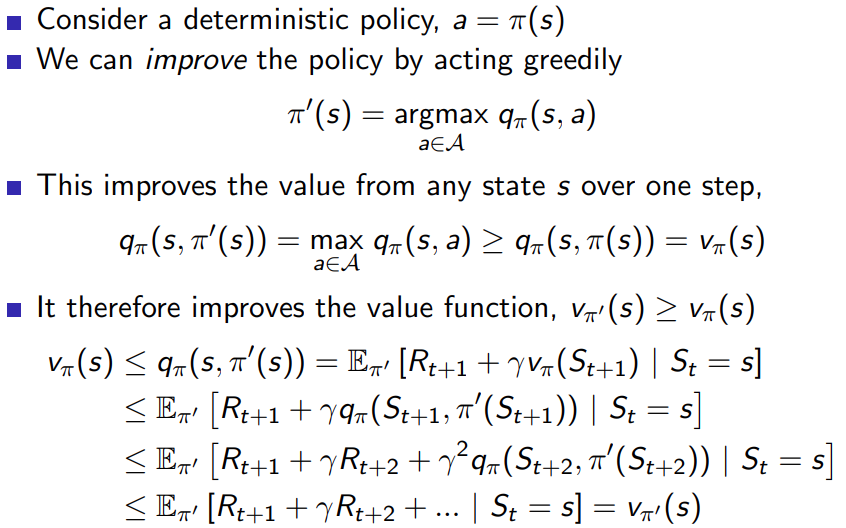
3.1 how to improve policy
Give a policy π \pi π
- Evaluate the policy π \pi π
V π ( s ) = ∑ a ∈ A π ( a ∣ s ) [ R ( s , a ) + γ ∑ s ′ ∈ S P ( s ′ ∣ s , a ) V π ( s ′ ) ] V_{\pi}(s) = \sum_{a \in \mathcal{A}} \pi(a|s) \left[R(s, a) + \gamma \sum_{s' \in \mathcal{S}} P(s'|s, a) V_{\pi}(s')\right] Vπ(s)=a∈A∑π(a∣s)[R(s,a)+γs′∈S∑P(s′∣s,a)Vπ(s′)]
Improve the policy by acting greedily with respect to v π v_{\pi} vπ
π ′ = g r e e d y ( v π ) \pi'=greedy(v_{\pi}) π′=greedy(vπ)
每一步都找出optimal的value function, 作为state的value function

这里我们将使用一个简单的网格世界(Grid World)环境作为Policy Iteration的范例。这个环境中,智能体(agent)可以执行四个操作:上、下、左、右。智能体的目标是从初始位置移动到终点位置,同时最小化行动次数。
假设我们有一个4x4的网格世界,终点位置在右下角。每次行动的奖励(reward)是-1。使用Policy Iteration方法,我们将找到一个策略,使得智能体以最少的行动次数到达终点。
import numpy as np
def gridworld_policy_iteration():
n_states = 16
n_actions = 4
terminal_state = 15
rewards = -1 * np.ones((n_states, n_actions))
rewards[terminal_state, :] = 0
transition_matrix = np.zeros((n_states, n_actions, n_states))
for state in range(n_states):
for action in range(n_actions):
if state == terminal_state:
transition_matrix[state, action, state] = 1
continue
next_state = state
if action == 0: # Up
next_state = max(state - 4, 0)
elif action == 1: # Down
next_state = min(state + 4, n_states - 1)
elif action == 2: # Left
next_state = state - 1
if state % 4 == 0:
next_state = state
elif action == 3: # Right
next_state = state + 1
if (state + 1) % 4 == 0:
next_state = state
transition_matrix[state, action, next_state] = 1
gamma = 0.99
max_iter = 1000
theta = 1e-10
policy = np.ones((n_states, n_actions)) / n_actions
for _ in range(max_iter):
policy_stable = True
# Policy Evaluation
V = np.zeros(n_states)
while True:
delta = 0
for state in range(n_states):
v = V[state]
V[state] = np.sum(policy[state, :] * (rewards[state, :] + gamma * transition_matrix[state, :, :] @ V))
delta = max(delta, abs(v - V[state]))
if delta < theta:
break
# Policy Improvement
for state in range(n_states):
old_action = np.argmax(policy[state, :])
action_returns = np.zeros(n_actions)
for action in range(n_actions):
action_returns[action] = rewards[state, action] + gamma * np.dot(transition_matrix[state, action, :], V)
best_action = np.argmax(action_returns)
policy[state, :] = 0
policy[state, best_action] = 1
if old_action != best_action:
policy_stable = False
if policy_stable:
break
optimal_policy = policy
state_values = V
return optimal_policy, state_values
optimal_policy, state_values = gridworld_policy_iteration()
print("Optimal Policy:")
print(optimal_policy)
print("State Values:")
print(state_values)
代码的关键在于
# 找到最大reward对应的action,对其policy为1,其他为0
for action in range(n_actions):
action_returns[action] = rewards[state, action] + gamma * np.dot(transition_matrix[state, action, :], V)
best_action = np.argmax(action_returns)
policy[state, :] = 0
policy[state, best_action] = 1
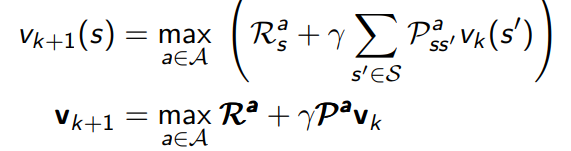
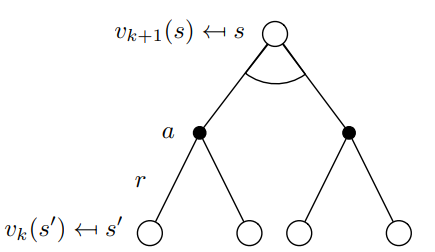
4 value iteration
4.1 value iteration in MDPs
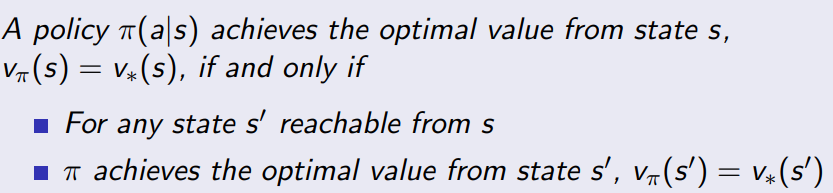
4.1.1 principle of optimality
任何的优化策略可以划分成两个组成部分,
1.第一步采用最优动作
A
∗
A_{*}
A∗
2.对successor state采用optimal policy
4.1.2 deterministic value iteration
- 子问题的solution v ∗ ( s ′ ) v_{*}(s') v∗(s′)
- 问题的solution
v
∗
(
s
)
v_{*}(s)
v∗(s)可以通过往前走一步得到

- 直觉理解,start with final rewards and work backwards
- still works with loopy, stochastic MDPs
值迭代的思想非常简单,代码看起来更美观一点
import numpy as np
# GridWorld environment
rows = 4
cols = 4
terminal_states = [(0, 0), (rows-1, cols-1)]
actions = [(0, 1), (1, 0), (0, -1), (-1, 0)]
def is_valid_state(state):
r, c = state
return 0 <= r < rows and 0 <= c < cols and state not in terminal_states
def next_state(state, action):
r, c = np.array(state) + np.array(action)
if is_valid_state((r, c)):
return r, c
return state
# Value iteration
def value_iteration(gamma=1, theta=1e-6):
V = np.zeros((rows, cols))
while True:
delta = 0
for r in range(rows):
for c in range(cols):
state = (r, c)
if state in terminal_states:
continue
v = V[state]
max_value = float('-inf')
for a in actions:
next_s = next_state(state, a)
value = -1 + gamma * V[next_s]
max_value = max(max_value, value)
V[state] = max_value
delta = max(delta, abs(v - V[state]))
if delta < theta:
break
return V
# Find optimal policy
def find_optimal_policy(V, gamma=1):
policy = np.zeros((rows, cols, len(actions)))
for r in range(rows):
for c in range(cols):
state = (r, c)
if state in terminal_states:
continue
q_values = np.zeros(len(actions))
for i, a in enumerate(actions):
next_s = next_state(state, a)
q_values[i] = -1 + gamma * V[next_s]
optimal_action = np.argmax(q_values)
policy[state][optimal_action] = 1
return policy
# Find the shortest path using the optimal policy
def find_shortest_path(policy):
state = (0, 0)
path = [state]
while state != (rows-1, cols-1):
action_idx = np.argmax(policy[state])
state = next_state(state, actions[action_idx])
path.append(state)
return path
V = value_iteration()
policy = find_optimal_policy(V)
path = find_shortest_path(policy)
print("Shortest path:", path)
5 extensions to DP
5.1 Asynchronous Dynamic Programming

5.1.1 in place dynamic programming
- synchronuous value iteration
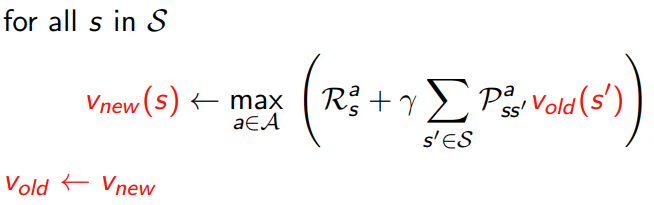
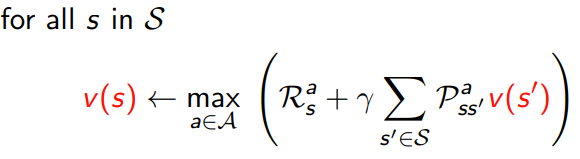
- in place value iteration
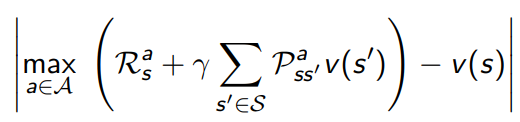
5.1.2 prioritised sweeping
- Use magnitude of Bellman error to guide state selection, e.g.
5.1.3 real time dp

6 Contraction Mapping
类似于李雅普诺夫稳定性的定义
6.1技术问题
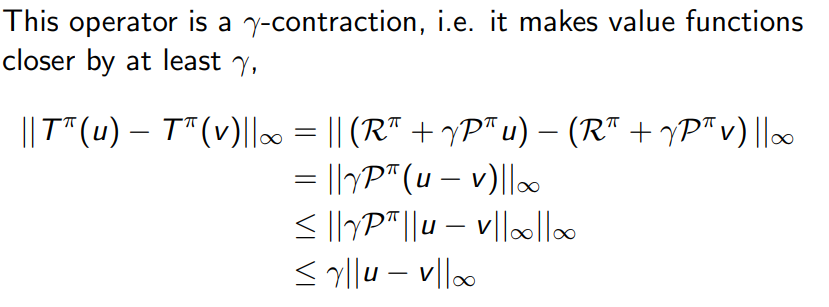
6.2 value function space
6.3 bellman expectation backup is a contraction