被控对象
考虑这么一个被控对象
J
θ
¨
(
t
)
=
u
(
t
)
+
d
(
t
)
J \ddot\theta(t) = u(t) + d(t)
Jθ¨(t)=u(t)+d(t)
其中,
J
J
J 为转动惯量,
θ
\theta
θ 为角度,
u
u
u 为控制量,
d
d
d 为扰动,且
d
(
t
)
<
D
d(t) < D
d(t)<D 扰动有界
设计滑模面
设计滑模面为
s
=
c
e
(
t
)
+
e
˙
(
t
)
s = ce(t) + \dot e(t)
s=ce(t)+e˙(t)
其中跟踪误差及其导数为,
θ
d
\theta_d
θd 为理想的角度信号
e
(
t
)
=
θ
(
t
)
−
θ
d
(
t
)
e(t) = \theta (t) - \theta_d(t)
e(t)=θ(t)−θd(t)
e ˙ ( t ) = θ ˙ ( t ) − θ ˙ d ( t ) \dot e(t) = \dot\theta (t) - \dot\theta_d(t) e˙(t)=θ˙(t)−θ˙d(t)
获得控制量
s ˙ = c e ˙ ( t ) + e ¨ ( t ) = c e ˙ ( t ) + 1 J ( u ( t ) + d ( t ) ) − θ ¨ d ( t ) = − ε s g n ( s ) \begin{align} \dot s &= c \dot e(t) + \ddot e(t) = c \dot e(t) + \frac{1}{J} (u(t) + d(t)) - \ddot \theta_d(t) = -\varepsilon sgn(s) \end{align} s˙=ce˙(t)+e¨(t)=ce˙(t)+J1(u(t)+d(t))−θ¨d(t)=−εsgn(s)
反解出控制量
u
(
t
)
u(t)
u(t)
u
(
t
)
=
J
(
−
c
e
˙
(
t
)
+
θ
¨
d
(
t
)
−
ε
s
g
n
(
s
)
)
−
d
(
t
)
u(t) = J(-c\dot e(t) + \ddot \theta_d(t) - \varepsilon sgn(s)) - d(t)
u(t)=J(−ce˙(t)+θ¨d(t)−εsgn(s))−d(t)
这里我们忽略干扰
u
(
t
)
=
J
(
−
c
e
˙
(
t
)
+
θ
¨
d
(
t
)
−
ε
s
g
n
(
s
)
)
u(t) = J(-c\dot e(t) + \ddot \theta_d(t) - \varepsilon sgn(s))
u(t)=J(−ce˙(t)+θ¨d(t)−εsgn(s))
证明稳定性
设LYapunov函数
V
=
1
2
S
2
V=\frac{1}{2}S^2
V=21S2,则有
V
˙
=
s
s
˙
=
s
(
c
e
˙
(
t
)
+
e
¨
(
t
)
)
=
s
(
c
e
˙
(
t
)
+
1
J
(
u
(
t
)
+
d
(
t
)
)
−
θ
¨
d
(
t
)
)
=
s
(
c
e
˙
(
t
)
+
1
J
(
J
(
−
c
e
˙
(
t
)
+
θ
¨
d
(
t
)
−
ε
s
g
n
(
s
)
)
+
d
(
t
)
)
−
θ
¨
d
(
t
)
)
=
s
(
−
ε
s
g
n
(
s
)
+
1
J
d
(
t
)
)
=
−
ε
∣
s
∣
+
1
J
s
d
(
t
)
\begin{align} \dot V &= s \dot s \\ &= s(c \dot e(t) + \ddot e(t)) \\ &= s(c \dot e(t) + \frac{1}{J} (u(t) + d(t)) - \ddot \theta_d(t)) \\ &= s(c \dot e(t) + \frac{1}{J} (J(-c\dot e(t) + \ddot \theta_d(t) - \varepsilon sgn(s)) + d(t)) - \ddot \theta_d(t)) \\ &= s(-\varepsilon sgn(s) + \frac{1}{J} d(t)) \\ &= -\varepsilon |s| + \frac{1}{J}sd(t) \end{align}
V˙=ss˙=s(ce˙(t)+e¨(t))=s(ce˙(t)+J1(u(t)+d(t))−θ¨d(t))=s(ce˙(t)+J1(J(−ce˙(t)+θ¨d(t)−εsgn(s))+d(t))−θ¨d(t))=s(−εsgn(s)+J1d(t))=−ε∣s∣+J1sd(t)
可见,当干扰$d(t) $ 有上界时,即
d
(
t
)
<
D
d(t) < D
d(t)<D 扰动有界,若
ε
\varepsilon
ε 取值合理,则系统稳定。
python仿真程序
假设我们跟踪的仿真信号为 θ d ( t ) = s i n ( t ) \theta_d(t) = sin(t) θd(t)=sin(t) ,转动惯量 J = 10 J=10 J=10 ,初始值 θ ( 0 ) = 0 \theta(0) = 0 θ(0)=0 , θ ˙ ( 0 ) = 0 \dot \theta(0) = 0 θ˙(0)=0。
import numpy as np
import matplotlib.pyplot as plt
# 被控对象
class ControlModel():
def __init__(self):
self.T = 10
self.times = 10 * 1000
self.time_T = self.T / self.times
self.pos = 0
self.theta = np.zeros(self.times, dtype='float64')
self.dot_theta = np.zeros(self.times, dtype='float64')
self.u = np.zeros(self.times, dtype='float64')
self.d = np.zeros(self.times, dtype='float64')
self.J = 10
self.Max_u = 30
def reset(self):
self.pos = 0
self.dot_theta[0] = np.deg2rad(0)
self.theta[0] = np.deg2rad(0)
self.d[0] = 0
def step(self, u):
if self.pos >= self.times:
return True
if np.abs(u) > self.Max_u:
u = np.sign(u) * self.Max_u
self.u[self.pos] = u
self.d[self.pos] = 10
self.stepOnce()
self.pos += 1
return False
def stepOnce(self):
data = np.array([self.u[self.pos],
self.d[self.pos],
self.dot_theta[self.pos],
self.theta[self.pos],
self.J])
k1 = self.time_T * self.iterateOnce(data)
k2 = self.time_T * self.iterateOnce(data + 0.5 * k1)
k3 = self.time_T * self.iterateOnce(data + 0.5 * k2)
k4 = self.time_T * self.iterateOnce(data + k3)
data = data + (k1 + 2 * k2 + 2 * k3 + k4) / 6
self.dot_theta[self.pos + 1] = data[2]
self.theta[self.pos + 1] = data[3]
def iterateOnce(self, data):
u = data[0]
d = data[1]
dot_theta = data[2]
theta = data[3]
J = data[4]
_dot_theta = (u + d) / J
_theta = dot_theta
return np.array([0, 0, _dot_theta, _theta, 0])
def get_theta(self):
return self.theta[self.pos - 1]
def get_dot_theta(self):
return self.dot_theta[self.pos - 1]
# 误差,误差的一阶导,误差的二阶导的结构
class Control:
def __init__(self):
self.e = 0
self.dot_e = 0
self.ddot_e = 0
def insert(self, e):
self.ddot_e = e - self.e - self.dot_e
self.dot_e = e - self.e
self.e = e
def get_e(self):
return self.e
def get_dot_e(self):
return self.dot_e
def get_ddot_e(self):
return self.ddot_e
# 生成控制对象
M = ControlModel()
M.reset()
C = Control()
T = Control()
theta_list = []
for i in range(M.times - 1):
theta_d = np.sin(i / 1000)
theta_list.append(theta_d)
e = (theta_d - M.get_theta()) / M.time_T
C.insert(e)
T.insert(theta_d)
c = 5
varesplion = 3
s = c * C.get_e() + C.get_dot_e()
u = M.J * (c * C.get_dot_e() + T.get_ddot_e() + varesplion * np.sign(s))
M.step(u)
仿真结果
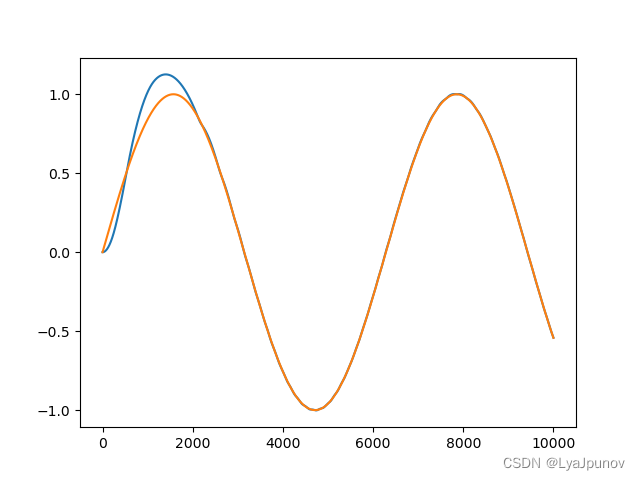
位置跟踪曲线如下
控制量曲线如下
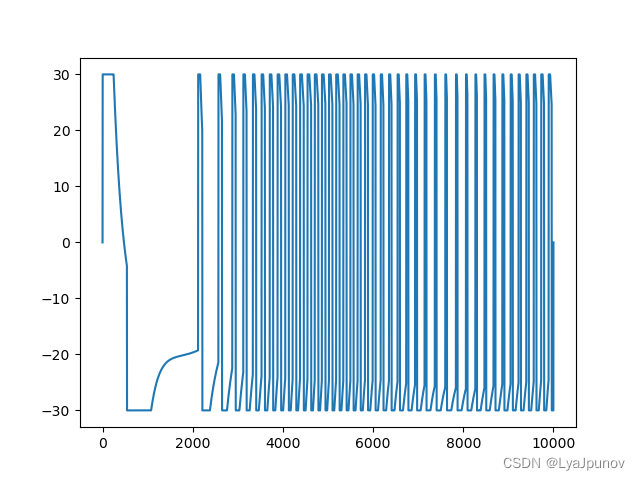
可见,位置跟踪的效果还是不错的,这里我们进行了一定的限幅,限幅影响了它的控制效果,但是控制量是存在抖振的,在真实的控制环境中,元器件不一定承受的起这种抖振。