1. Why use the Riccati equation?
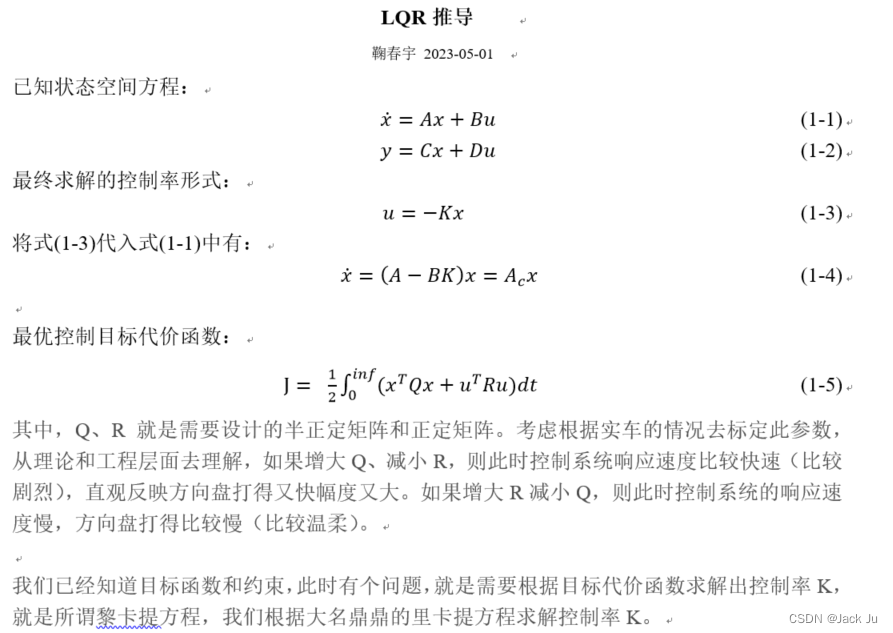
最优控制算法LQR是Linear Quadratic Regulator的缩写,Q、R就是需要设计的半正定矩阵和正定矩阵。考虑根据实车的情况去标定此参数,从理论和工程层面去理解,如果增大Q、减小R,则此时控制系统响应速度比较快速(比较剧烈),直观反映方向盘打得又快幅度又大。如果增大R减小Q,则此时控制系统的响应速度慢,方向盘打得比较慢(比较温柔)。
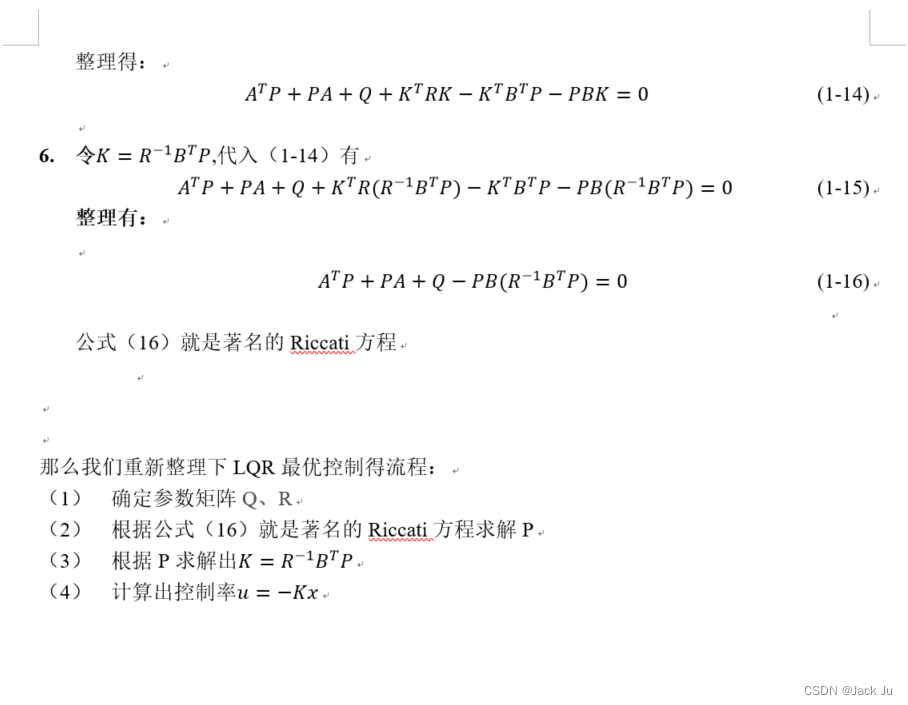
我们已经知道目标函数和约束,此时有个问题,就是需要根据目标代价函数求解出控制率K,就是所谓黎卡提方程,我们根据大名鼎鼎的里卡提方程求解控制率K。
2. Proof of Riccati Equation for Continuous System
笔者针对于连续系统得黎卡提方程进行了推导证明。
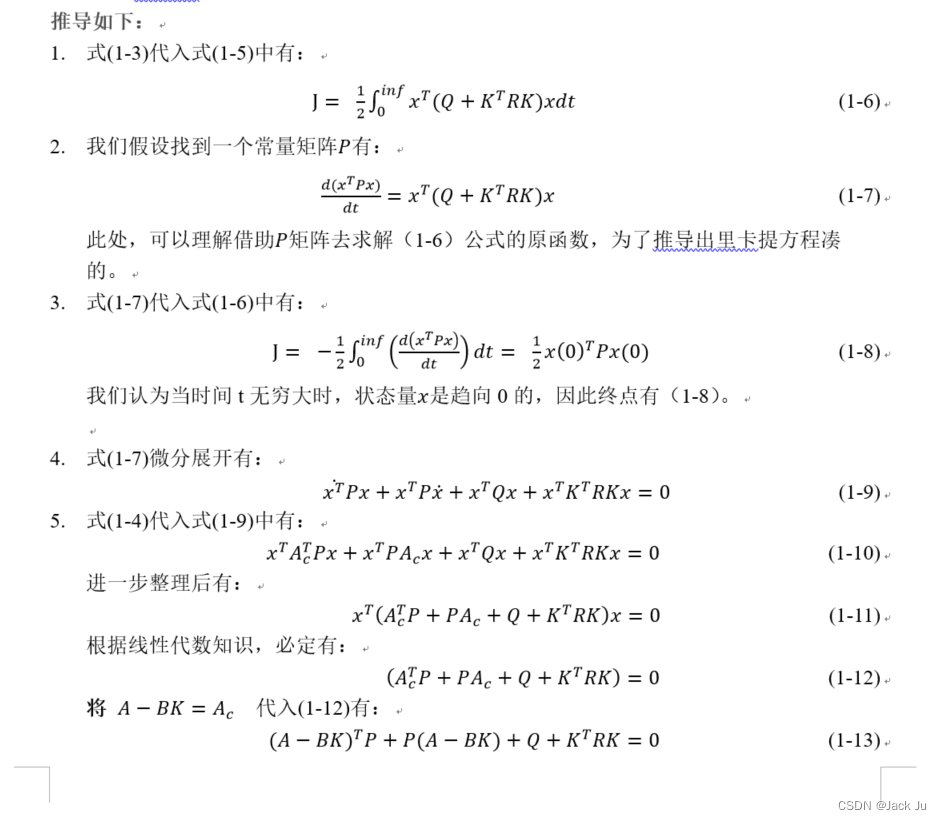
关于证明过程,其实可以理解为为了证明这个里卡提方程,去拼凑,然后证明出这个结论。
考虑到实









![[AION]我眼中的《永恒之塔私服》](https://img-blog.csdnimg.cn/61cf26f896e2461090297b31288bc25d.jpeg)