帕克变换的物理意义
前面说到克拉克变换的物理意义,是将三相定子线圈产生磁场的过程,等效为2个正交放置的线圈,来产生同样的磁场。通过控制这两个正交线圈即可等效控制三相定子线圈。
还有一个问题,定子线圈产生的磁场,如果与转子位置不匹配就成了开环控制了,显然我们需要与转子的位置对应起来控制,这个过程也叫闭环控制。也就是不断的读取转子的位置,并根据这个位置,实时的给出当前所需要驱动磁场方向和强度。
定子磁场坐标是一定的,也就是我们之前说到的定子坐标系,和Ia-Iβ坐标系。
而转子的磁场是一直在旋转,这个叫转子坐标系。以转子自身来说,它的磁场是恒定的,只是旋转角度不停的在变化,我们也可以由此建立一个dq坐标系,如下
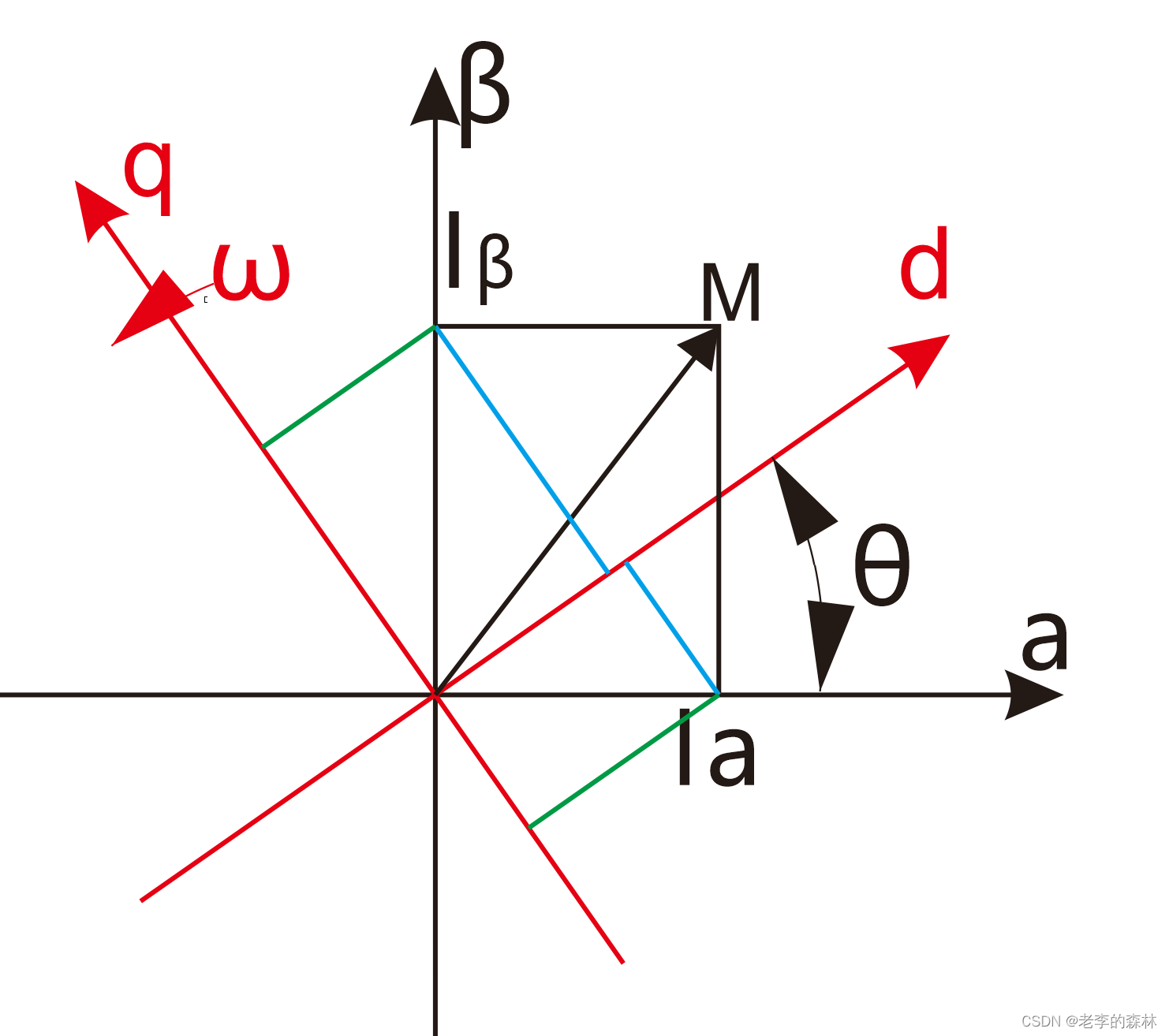
转子的横轴是d轴,也叫直轴,纵轴是q轴,也就是正交的意思,叫交轴。似乎是直轴表示的励磁电流,交轴表示的旋转的驱动力,不知道这样理解对不对。
d-q坐标系与a-β坐标系之间有一个θ角,这个代表的是转子旋转的角度。还有一个ω表示转子的旋转角速度。
在a-β坐标系内,有一个黑色的向量M,代表的是转子的磁场向量。也有一个ω表示磁场向量的旋转角速度,这两个ω是相同的含义。
这个M向量在a-β坐标系内是不停旋转的,但是在d-q坐标系内是不变的,在d-q坐标系内,它是Vd和Vq,是定值。只是相对于a-β坐标系来说,d-q坐标系是在不停的旋转而已。
如此我们就可以把电机的三个坐标系对应起来了,电机本身的坐标系是二维三轴坐标系,与a-β坐标系通过克拉克变换重合,就略去不画了。
θ角也叫电角度,它可以通过编码器来实时获得,电角度 = 编码器角度 * 极对数
帕克变换
M在a-β坐标系内的投影分别是ia和iβ,然后为了方便观看,把上面的图旋转一下,以d-q坐标系的视角来看,就是下图
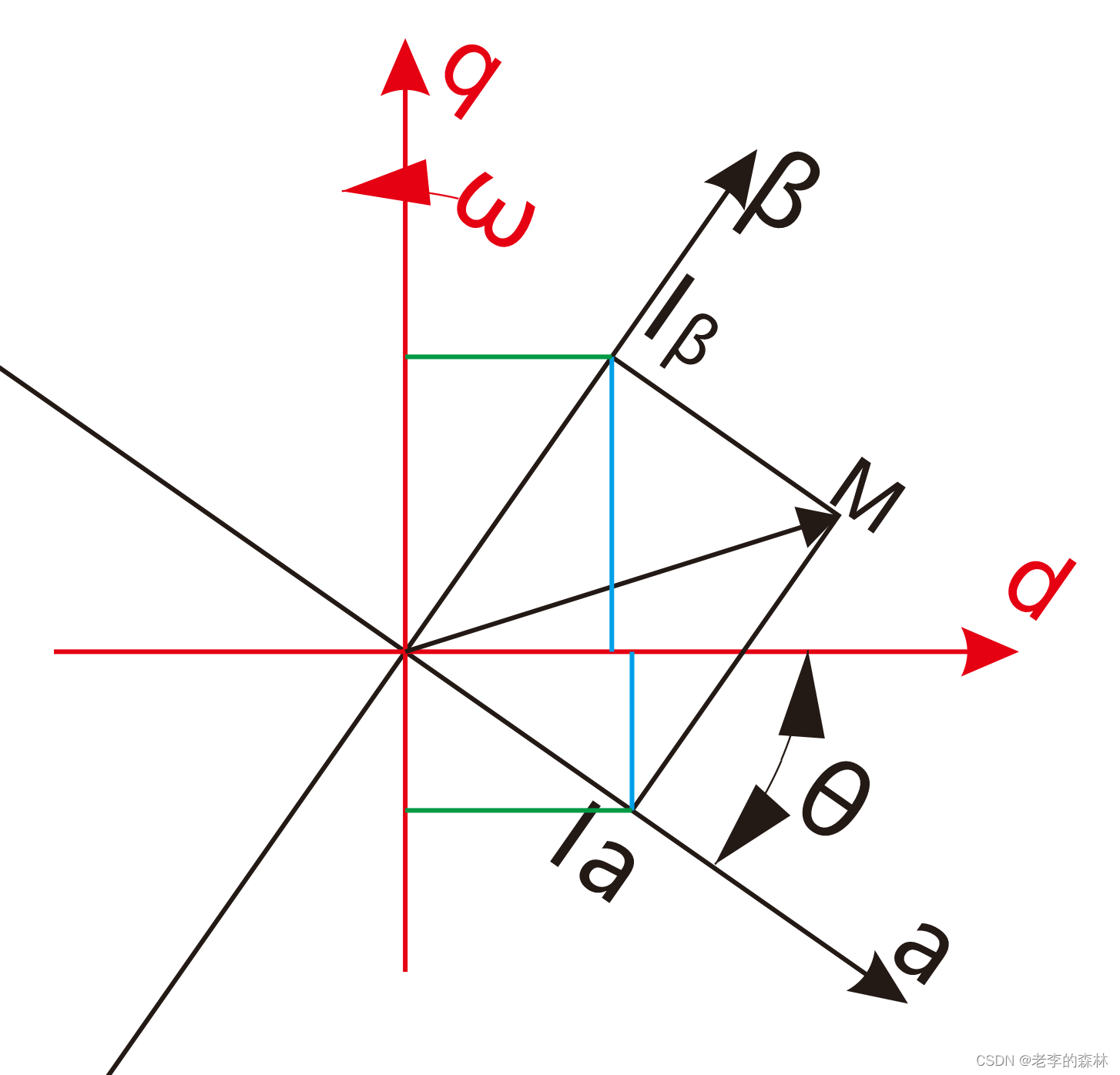
ia和iβ在d轴上的投影是两段绿色的线,都在id的正方向
ia和iβ在q轴上的投影是两段蓝色的线,ia在q轴的负方向,iβ在q轴的正方向。
用三角函数表示出来就是
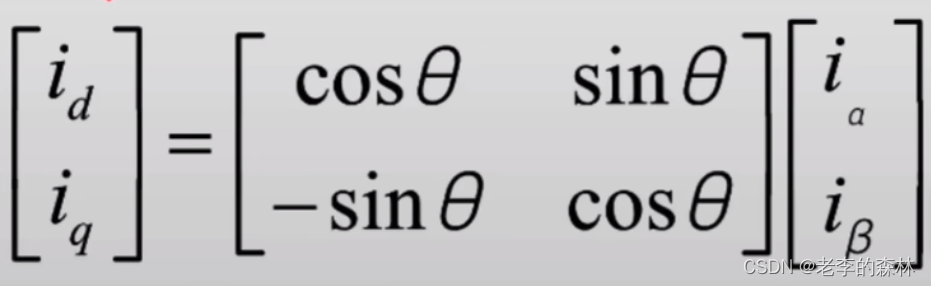
id = iacosθ + iβsinθ
iq = -iasinθ + iβcosθ
写成矩阵就是
帕克逆变换
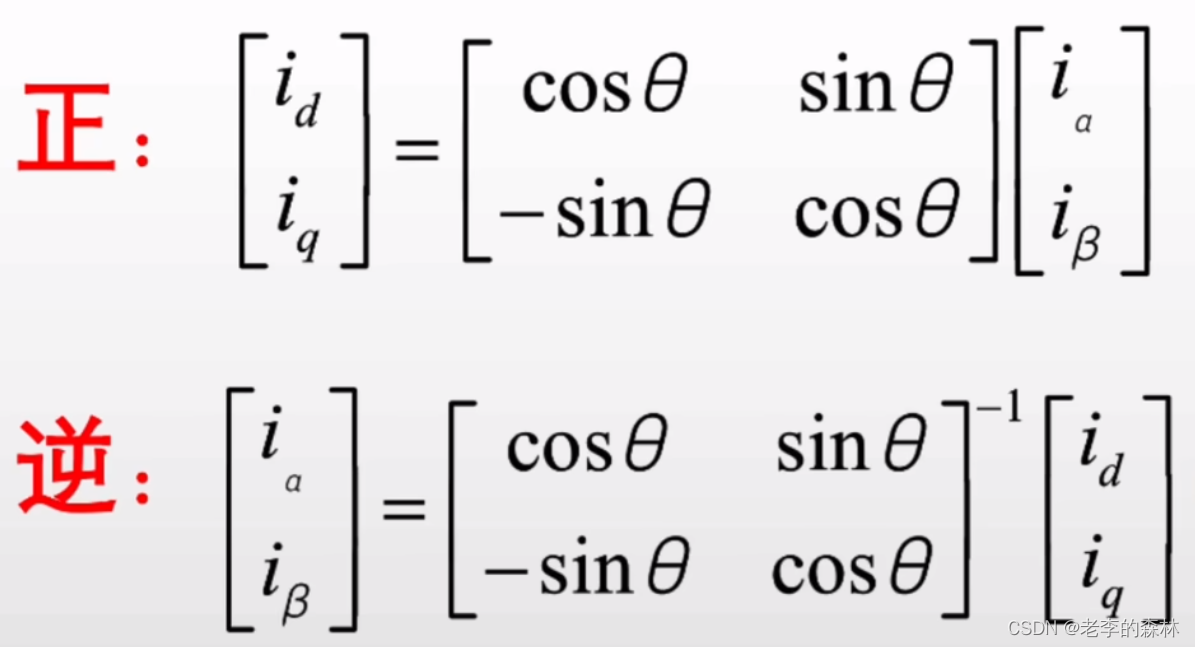
三角函数表示如下
ia = idcosθ - iqsinθ
iβ = idsinθ + iqcosθ
FOC方式驱动无刷电机所用到的数学知识就是克拉克变换和帕克变换,及其逆变换。
这两个变换是如此精妙,也如此简单,令人叹为观止。每当我读到这些人类智慧之光时,总是会被前人的智慧,以及他(她)们为推动人类科技进步所作的努力所感动,因为我也是做的技术这一行,自然明白这些成果得来之不易。在此向前辈们致敬!







![[架构之路-158]-《软考-系统分析师》-13-系统设计 - 高内聚低耦合详解、图解以及技术手段](https://img-blog.csdnimg.cn/img_convert/1b5eb161416b6c7a9e0917256b5f6f17.png)