程序示例精选
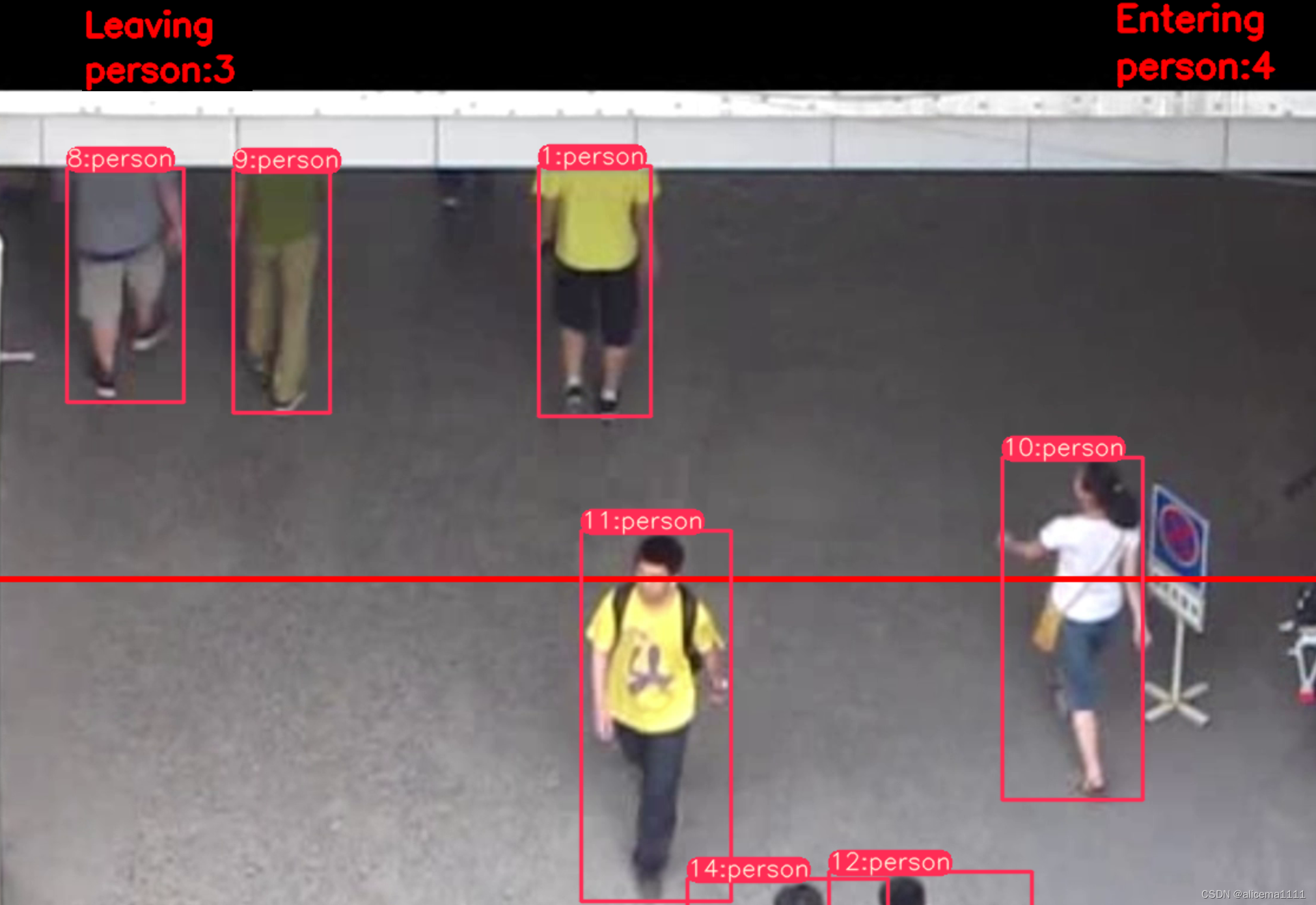
Python+Yolov8+Deepsort入口人流量统计
如需安装运行环境或远程调试,见文章底部个人QQ名片,由专业技术人员远程协助!
前言
这篇博客针对<<Python+Yolov8+Deepsort入口人流量统计>>编写代码,代码整洁,规则,易读。 学习与应用推荐首选。
文章目录
一、所需工具软件
二、使用步骤
1. 引入库
2. 代码实现
3. 运行结果
三、在线协助
一、所需工具软件
1. Python
2. OpenCV,Yolov8
二、使用步骤
1.引入库
import hydra
import torch
import argparse
import time
from pathlib import Path
import cv2
import torch
import torch.backends.cudnn as cudnn
from numpy import random
from ultralytics.yolo.engine.predictor import BasePredictor
from ultralytics.yolo.utils import DEFAULT_CONFIG, ROOT, ops
from ultralytics.yolo.utils.checks import check_imgsz
from ultralytics.yolo.utils.plotting import Annotator, colors, save_one_box
import cv2
from deep_sort_pytorch.utils.parser import get_config
from deep_sort_pytorch.deep_sort import DeepSort
from collections import deque
import numpy as np2. 代码实现
代码如下:
def init_tracker():
global deepsort
cfg_deep = get_config()
cfg_deep.merge_from_file("deep_sort_pytorch/configs/deep_sort.yaml")
deepsort= DeepSort(cfg_deep.DEEPSORT.REID_CKPT,
max_dist=cfg_deep.DEEPSORT.MAX_DIST, min_confidence=cfg_deep.DEEPSORT.MIN_CONFIDENCE,
nms_max_overlap=cfg_deep.DEEPSORT.NMS_MAX_OVERLAP, max_iou_distance=cfg_deep.DEEPSORT.MAX_IOU_DISTANCE,
max_age=cfg_deep.DEEPSORT.MAX_AGE, n_init=cfg_deep.DEEPSORT.N_INIT, nn_budget=cfg_deep.DEEPSORT.NN_BUDGET,
use_cuda=True)
#########################################################################################
def xyxy_to_tlwh(bbox_xyxy):
tlwh_bboxs = []
for i, box in enumerate(bbox_xyxy):
x1, y1, x2, y2 = [int(i) for i in box]
top = x1
left = y1
w = int(x2 - x1)
h = int(y2 - y1)
tlwh_obj = [top, left, w, h]
tlwh_bboxs.append(tlwh_obj)
return tlwh_bboxs
def compute_color_for_labels(label):
"""
Simple function that adds fixed color depending on the class
"""
if label == 0: #person
color = (85,45,255)
elif label == 2: # Car
color = (222,82,175)
elif label == 3: # Motobike
color = (0, 204, 255)
elif label == 5: # Bus
color = (0, 149, 255)
else:
color = [int((p * (label ** 2 - label + 1)) % 255) for p in palette]
return tuple(color)
def draw_border(img, pt1, pt2, color, thickness, r, d):
x1,y1 = pt1
x2,y2 = pt2
# Top left
cv2.line(img, (x1 + r, y1), (x1 + r + d, y1), color, thickness)
cv2.line(img, (x1, y1 + r), (x1, y1 + r + d), color, thickness)
cv2.ellipse(img, (x1 + r, y1 + r), (r, r), 180, 0, 90, color, thickness)
# Top right
cv2.line(img, (x2 - r, y1), (x2 - r - d, y1), color, thickness)
cv2.line(img, (x2, y1 + r), (x2, y1 + r + d), color, thickness)
cv2.ellipse(img, (x2 - r, y1 + r), (r, r), 270, 0, 90, color, thickness)
# Bottom left
cv2.line(img, (x1 + r, y2), (x1 + r + d, y2), color, thickness)
cv2.line(img, (x1, y2 - r), (x1, y2 - r - d), color, thickness)
cv2.ellipse(img, (x1 + r, y2 - r), (r, r), 90, 0, 90, color, thickness)
# Bottom right
cv2.line(img, (x2 - r, y2), (x2 - r - d, y2), color, thickness)
cv2.line(img, (x2, y2 - r), (x2, y2 - r - d), color, thickness)
cv2.ellipse(img, (x2 - r, y2 - r), (r, r), 0, 0, 90, color, thickness)
cv2.rectangle(img, (x1 + r, y1), (x2 - r, y2), color, -1, cv2.LINE_AA)
cv2.rectangle(img, (x1, y1 + r), (x2, y2 - r - d), color, -1, cv2.LINE_AA)
cv2.circle(img, (x1 +r, y1+r), 2, color, 12)
cv2.circle(img, (x2 -r, y1+r), 2, color, 12)
cv2.circle(img, (x1 +r, y2-r), 2, color, 12)
cv2.circle(img, (x2 -r, y2-r), 2, color, 12)
return img
def UI_box(x, img, color=None, label=None, line_thickness=None):
# Plots one bounding box on image img
tl = line_thickness or round(0.002 * (img.shape[0] + img.shape[1]) / 2) + 1 # line/font thickness
color = color or [random.randint(0, 255) for _ in range(3)]
c1, c2 = (int(x[0]), int(x[1])), (int(x[2]), int(x[3]))
cv2.rectangle(img, c1, c2, color, thickness=tl, lineType=cv2.LINE_AA)
if label:
tf = max(tl - 1, 1) # font thickness
t_size = cv2.getTextSize(label, 0, fontScale=tl / 3, thickness=tf)[0]
img = draw_border(img, (c1[0], c1[1] - t_size[1] -3), (c1[0] + t_size[0], c1[1]+3), color, 1, 8, 2)
cv2.putText(img, label, (c1[0], c1[1] - 2), 0, tl / 3, [225, 255, 255], thickness=tf, lineType=cv2.LINE_AA)
def intersect(A,B,C,D):
return ccw(A,C,D) != ccw(B,C,D) and ccw(A,B,C) != ccw(A,B,D)
def ccw(A,B,C):
return (C[1]-A[1]) * (B[0]-A[0]) > (B[1]-A[1]) * (C[0]-A[0])
def get_direction(point1, point2):
direction_str = ""
# calculate y axis direction
if point1[1] > point2[1]:
direction_str += "South"
elif point1[1] < point2[1]:
direction_str += "North"
else:
direction_str += ""
# calculate x axis direction
if point1[0] > point2[0]:
direction_str += "East"
elif point1[0] < point2[0]:
direction_str += "West"
else:
direction_str += ""
return direction_str
def draw_boxes(img, bbox, names,object_id, identities=None, offset=(0, 0)):
cv2.line(img, line[0], line[1], (0,0,255), 3)
height, width, _ = img.shape
# remove tracked point from buffer if object is lost
for key in list(data_deque):
if key not in identities:
data_deque.pop(key)
for i, box in enumerate(bbox):
x1, y1, x2, y2 = [int(i) for i in box]
x1 += offset[0]
x2 += offset[0]
y1 += offset[1]
y2 += offset[1]
# code to find center of bottom edge
center = (int((x2+x1)/ 2), int((y2+y2)/2))
# get ID of object
id = int(identities[i]) if identities is not None else 0
# create new buffer for new object
if id not in data_deque:
data_deque[id] = deque(maxlen= 64)
color = compute_color_for_labels(object_id[i])
obj_name = names[object_id[i]]
label = '{}{:d}'.format("", id) + ":"+ '%s' % (obj_name)
# add center to buffer
data_deque[id].appendleft(center)
if len(data_deque[id]) >= 2:
direction = get_direction(data_deque[id][0], data_deque[id][1])
if intersect(data_deque[id][0], data_deque[id][1], line[0], line[1]):
cv2.line(img, line[0], line[1], (255, 255, 255), 3)
if "South" in direction:
if obj_name not in object_counter:
object_counter[obj_name] = 1
else:
object_counter[obj_name] += 1
if "North" in direction:
if obj_name not in object_counter1:
object_counter1[obj_name] = 1
else:
object_counter1[obj_name] += 1
UI_box(box, img, label=label, color=color, line_thickness=2)
# draw trail
for i in range(1, len(data_deque[id])):
# check if on buffer value is none
if data_deque[id][i - 1] is None or data_deque[id][i] is None:
continue
# generate dynamic thickness of trails
thickness = int(np.sqrt(64 / float(i + i)) * 1.5)
# draw trails
#cv2.line(img, data_deque[id][i - 1], data_deque[id][i], color, thickness)
#4. Display Count in top right corner
for idx, (key, value) in enumerate(object_counter1.items()):
cnt_str = str(key) + ":" +str(value)
#cv2.line(img, (width - 500,25), (width,25), [85,45,255], 40)
cv2.putText(img, f'Entering', (width - 500, 35), 0, 1, [0,0,255], thickness=2, lineType=cv2.LINE_AA)
#cv2.line(img, (width - 500, 65 + (idx*40)), (width, 65 + (idx*40)), [85, 45, 255], 30)
cv2.putText(img, cnt_str, (width - 500, 75 + (idx*40)), 0, 1, [0,0,255], thickness = 2, lineType = cv2.LINE_AA)
for idx, (key, value) in enumerate(object_counter.items()):
cnt_str1 = str(key) + ":" +str(value)
#cv2.line(img, (20,25), (500,25), [85,45,255], 40)
cv2.putText(img, f'Leaving', (11, 35), 0, 1, [0,0,255], thickness=2, lineType=cv2.LINE_AA)
#cv2.line(img, (20,65+ (idx*40)), (127,65+ (idx*40)), [85,45,255], 30)
cv2.putText(img, cnt_str1, (11, 75+ (idx*40)), 0, 1, [0,0,255], thickness=2, lineType=cv2.LINE_AA)
return img
class DetectionPredictor(BasePredictor):
def get_annotator(self, img):
return Annotator(img, line_width=self.args.line_thickness, example=str(self.model.names))
def preprocess(self, img):
img = torch.from_numpy(img).to(self.model.device)
img = img.half() if self.model.fp16 else img.float() # uint8 to fp16/32
img /= 255 # 0 - 255 to 0.0 - 1.0
return img
def postprocess(self, preds, img, orig_img):
preds = ops.non_max_suppression(preds,
self.args.conf,
self.args.iou,
agnostic=self.args.agnostic_nms,
max_det=self.args.max_det)
for i, pred in enumerate(preds):
shape = orig_img[i].shape if self.webcam else orig_img.shape
pred[:, :4] = ops.scale_boxes(img.shape[2:], pred[:, :4], shape).round()
return preds
def write_results(self, idx, preds, batch):
p, im, im0 = batch
all_outputs = []
log_string = ""
if len(im.shape) == 3:
im = im[None] # expand for batch dim
self.seen += 1
im0 = im0.copy()
if self.webcam: # batch_size >= 1
log_string += f'{idx}: '
frame = self.dataset.count
else:
frame = getattr(self.dataset, 'frame', 0)
self.data_path = p
save_path = str(self.save_dir / p.name) # im.jpg
self.txt_path = str(self.save_dir / 'labels' / p.stem) + ('' if self.dataset.mode == 'image' else f'_{frame}')
log_string += '%gx%g ' % im.shape[2:] # print string
self.annotator = self.get_annotator(im0)
det = preds[idx]
all_outputs.append(det)
if len(det) == 0:
return log_string
for c in det[:, 5].unique():
n = (det[:, 5] == c).sum() # detections per class
log_string += f"{n} {self.model.names[int(c)]}{'s' * (n > 1)}, "
# write
gn = torch.tensor(im0.shape)[[1, 0, 1, 0]] # normalization gain whwh
xywh_bboxs = []
confs = []
oids = []
outputs = []
for *xyxy, conf, cls in reversed(det):
x_c, y_c, bbox_w, bbox_h = xyxy_to_xywh(*xyxy)
xywh_obj = [x_c, y_c, bbox_w, bbox_h]
xywh_bboxs.append(xywh_obj)
confs.append([conf.item()])
oids.append(int(cls))
xywhs = torch.Tensor(xywh_bboxs)
confss = torch.Tensor(confs)
outputs = deepsort.update(xywhs, confss, oids, im0)
if len(outputs) > 0:
bbox_xyxy = outputs[:, :4]
identities = outputs[:, -2]
object_id = outputs[:, -1]
draw_boxes(im0, bbox_xyxy, self.model.names, object_id,identities)
return log_string
@hydra.main(version_base=None, config_path=str(DEFAULT_CONFIG.parent), config_name=DEFAULT_CONFIG.name)
def predict(cfg):
init_tracker()
cfg.model = cfg.model or "yolov8n.pt"
cfg.imgsz = check_imgsz(cfg.imgsz, min_dim=2) # check image size
#cfg.source = cfg.source if cfg.source is not None else ROOT / "assets"
cfg.source = "imagesVideo/test2.mp4"
predictor = DetectionPredictor(cfg)
predictor()
if __name__ == "__main__":
predict()
3. 运行结果
三、在线协助:
如需安装运行环境或远程调试,见文章底部个人 QQ 名片,由专业技术人员远程协助!
1)远程安装运行环境,代码调试
2)Qt, C++, Python入门指导
3)界面美化
4)软件制作
博主推荐文章:python人脸识别统计人数qt窗体-CSDN博客
博主推荐文章:Python Yolov5火焰烟雾识别源码分享-CSDN博客
Python OpenCV识别行人入口进出人数统计_python识别人数-CSDN博客
个人博客主页:alicema1111的博客_CSDN博客-Python,C++,网页领域博主
博主所有文章点这里:alicema1111的博客_CSDN博客-Python,C++,网页领域博主
![[java]云HIS运维运营分系统功能实现(springboot框架)](https://img-blog.csdnimg.cn/58586826632646e29303a6c1253334a7.png)