问题引入
在构造编译器的Scanner时,常见的解决方法是使用自动机技术。从文法构造出的DFA的状态数过多会影响编译器的性能。DFA中有一些状态本质上是等价的,我们需要一种自动化算法用于最小化DFA。
算法介绍
常见的DFA最小化算法有三种,分别是Moore算法、Hopcroft算法和Brzozowski算法。
很多教材,包括我们学校使用的教材(龙书)中给出的方法都是Moore算法。
Hopcroft算法
话不多说,先上伪代码:
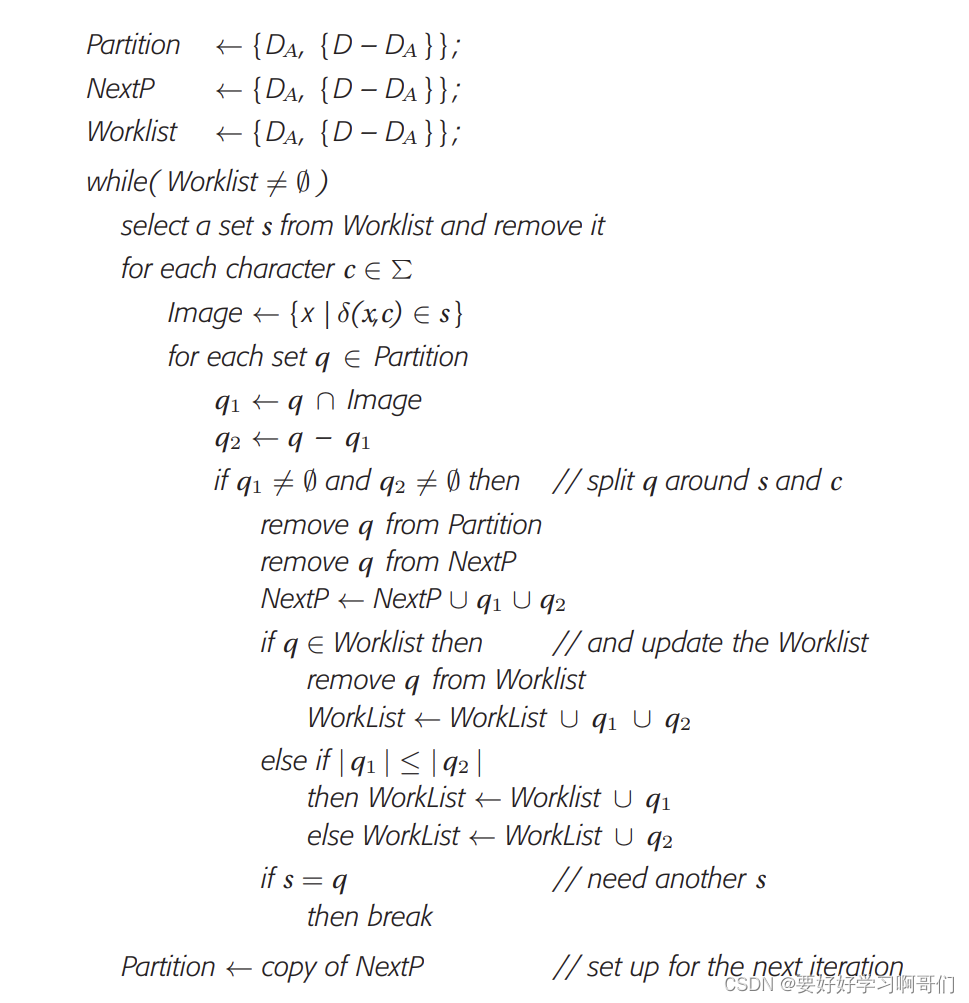
符号解释
先解释一下这里使用的一些数据结构
Partition
当前等价类集合。最早是两个等价类,分别是输入DFA中的接收状态集合和非接收状态集合。
NextP
在一次迭代之后更新之后的等价类集合。NextP的功能是暂存变化的等价类,这能起到一个同步更新划分的作用。
Worklist
这个比较有意思。它维护的是一个“可能会导致当前等价类需要进一步划分”的等价类列表。(请记住这个定义)举个例子,考虑等价类{A, B}和{C, D}。DFA中有边A->C和B->D,这时{C, D}就导致了{A, B}需要进一步划分成{A}、{B}。在每一轮迭代中,会从Worklist中选出一个等价类s,然后考察每个当前等价类(Partition)中的集合p,看s是否会导致p需要进一步划分。
细节解释
现在来分步看这段伪代码。
首先初始化了三个核心数据结构,这步比较好看懂。D即为DFA的状态集,DA即为DFA的接收状态集。
紧接着开始迭代。迭代的结束条件是Worklist不为空,迭代条件的设置也很有意思,Worklist是“可能会导致当前等价类需要进一步划分”的等价类列表,当这样的等价类不存在,那么自然就意味着当前等价类已经不需要进一步划分了,那么自然最小化的目标达成,算法结束。
在迭代的循环体内,首先从Worklist中挑出一个集合s,然后生成了一个状态集合Image。这里应该是叫“原像”。Image包含的状态就是能经过c字符变迁到s集合中任意一个状态的状态。
举个例子,s集合中有一个状态A,DFA中有边D->A@c,那么D就是Image中的一个状态。
紧接着,开始考察当前等价类(Partition)中的每一个等价类q,看它是否会因状态s而需要进一步划分。考察方式是计算q和Image的交集和差集,如果均不为空,那么代表发生了这样的情况:q中只有一部分状态经过c变迁会到达s集合中的状态(交集不为空),而另一部分则会到达其他状态(差集不为空),这与等价类的定义:等价类的任一对状态对某个输入字符c下的行为应该相同,即变迁到同一个等价类不符。因此我们把p划分为交集和差集,然后更新Parttion和NextP。
Q:为什么要从Partition中移除q呢?
A:这是因为每一轮迭代都会考虑所有字符。每个等价类对于不同的字符可能有不同的划分方式,为了避免冲突,一轮迭代中q被一个字符划分后,就移除,下一轮迭代再加进来,以考虑其他字符对它的划分。
Q:为什么对Worklist的更新因q是否在Worklist中而不同?
A:前面提到过,Worklist维护的是一个“可能会导致当前等价类需要进一步划分”的等价类列表。
1.如果某个q不在Worklist中了,就代表对所有的等价类,对所有的输入字符,都不会因为q而需要进一步划分。进一步地讲,就是说对于任意一个等价类,对于里面所有的状态在任意一个字符下,变迁得到的状态要么全在q中要么全不在q中。然而这时候q被划分了,这对其他等价类是可能有影响的,见下图:
假设q被分割成了q1和q2某个等价类s在任意一个输入字符下变迁得到的状态集合,在q中的分布可能出现以下四种情况:
如果出现了2、3、4情况,那么这个等价类s就不会因为q而需要进一步划分。
如果出现了第一种情况,那么这个等价类s会因为q而需要进一步划分!读者可以自行想象,这时候不管是把q1加进Worklist还是把q2加进Worklist,都会让s被同样地划分!
那么自然就加比较小的。
2.如果这个q还在Worklist中,那么自然要把q1和q2都加进来。这是直觉上就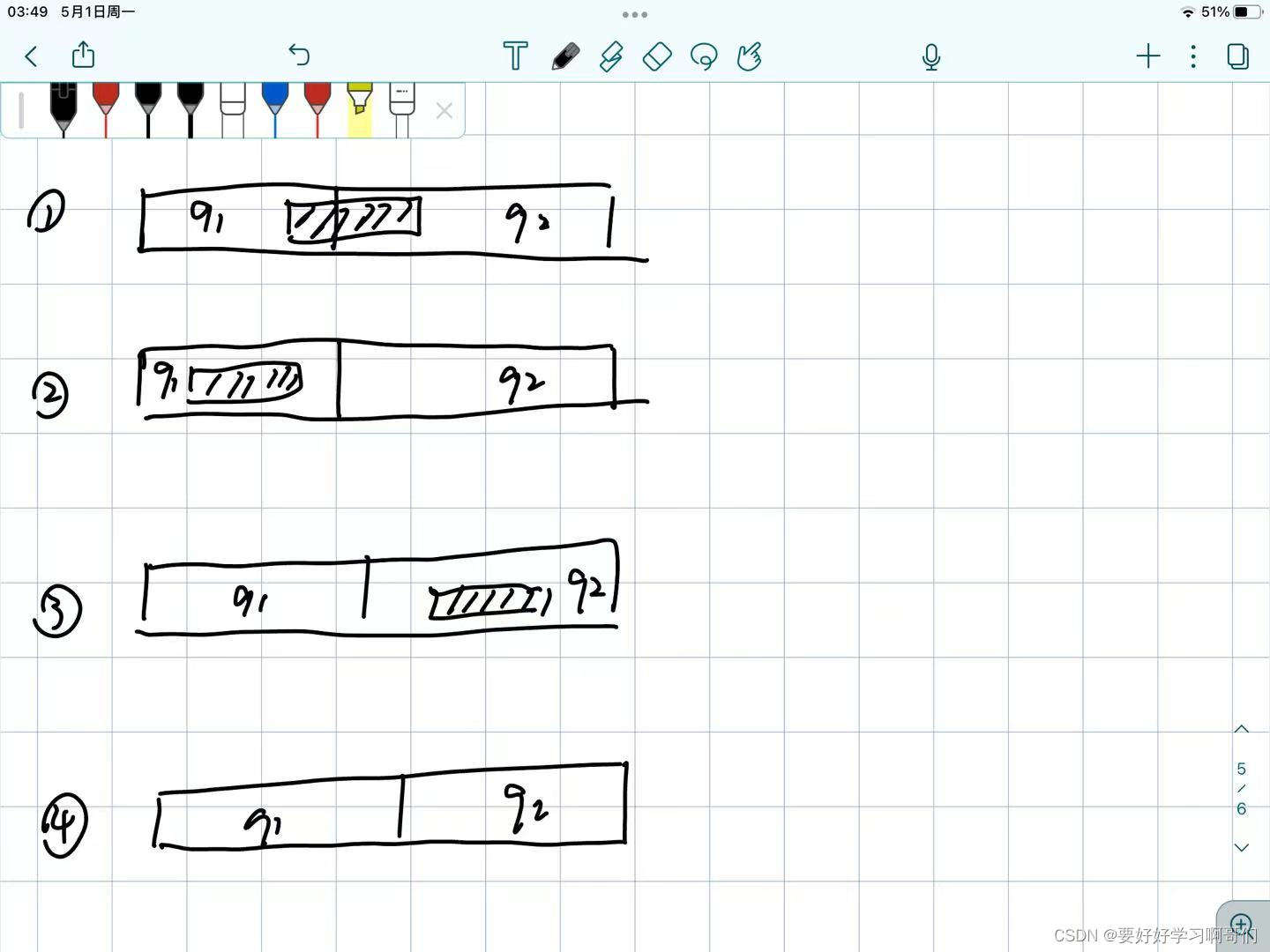
能理解的事情。
代码实现
坑,待填