目录
一,根轨迹的基本概念
1.根轨迹的基本概念
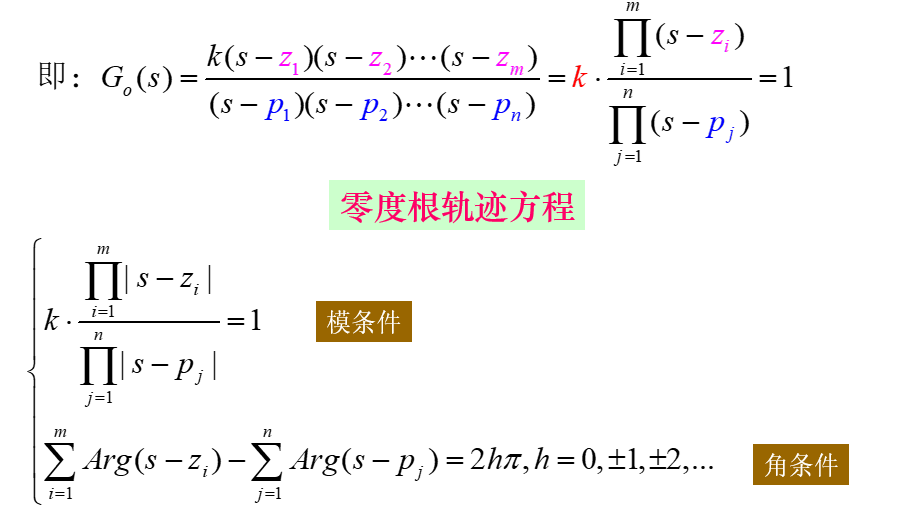
2.根轨迹方程
3.根轨迹方程的应用
二,根轨迹的绘制规则
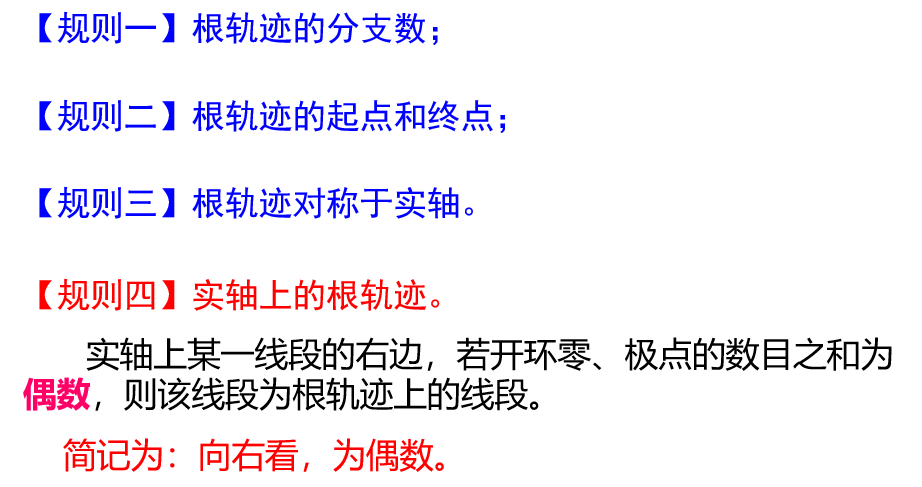
【规则一】根轨迹有n条分支:
【规则二】根轨迹对称于实轴:
【规则三】根轨迹的起点和终点:
【规则四】实轴上的根轨迹:
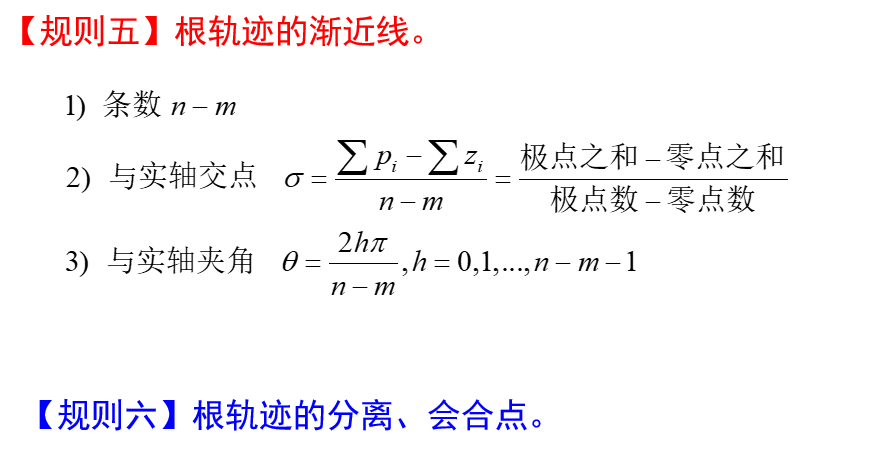
【规则五】根轨迹的渐近线:
【规则六】根轨迹的分离、会合点:
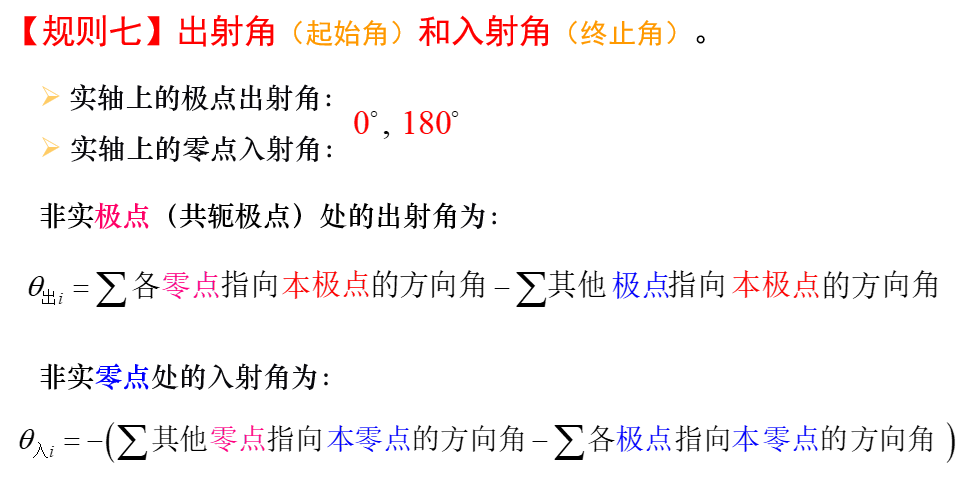
【规则七】出射角(起始角)和入射角(终止角):
【规则八】根轨迹与虚轴的交点:
【规则九】根之和与根之积:
小 结 :
三,系统零极点分布与响应的关系
闭环极点对系统阶跃响应的影响:
闭环零点对系统阶跃响应的影响:
闭环偶极子:
四,利用根轨迹解决工程问题
一、求控制参数(增益)的稳定边界
二、使系统具有单调过渡过程的增益范围:
三、满足调整时间要求的控制参数(增益):
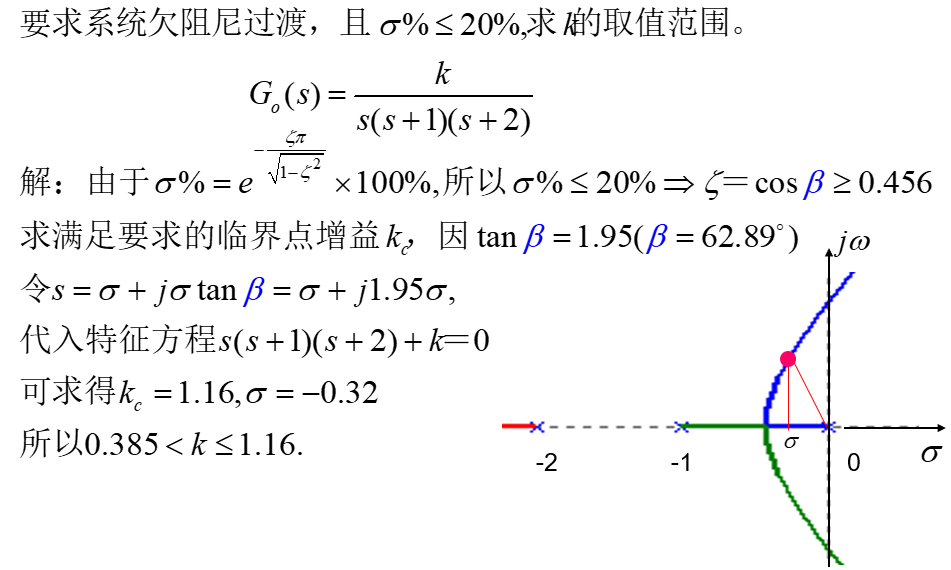
四、满足超调量要求的系统增益:
五,广义根轨迹
一、参数(量)根轨迹的绘制:
二、零度根轨迹:
六,根轨迹校正
一、根轨迹的改造:
二、根轨迹校正反馈系统
一,根轨迹的基本概念
1.根轨迹的基本概念
稳定性(闭环极点位于s左半平面)快速性(动态性能:取决于闭环极点和零点)准确性(静态误差:取决于型别、开环增益和输入)
 根轨迹法的特点
:
1
)图解法,形象、直观;
2)近似方法。3)适合研究某一参数变化时系统的性能。
根轨迹法的特点
:
1
)图解法,形象、直观;
2)近似方法。3)适合研究某一参数变化时系统的性能。
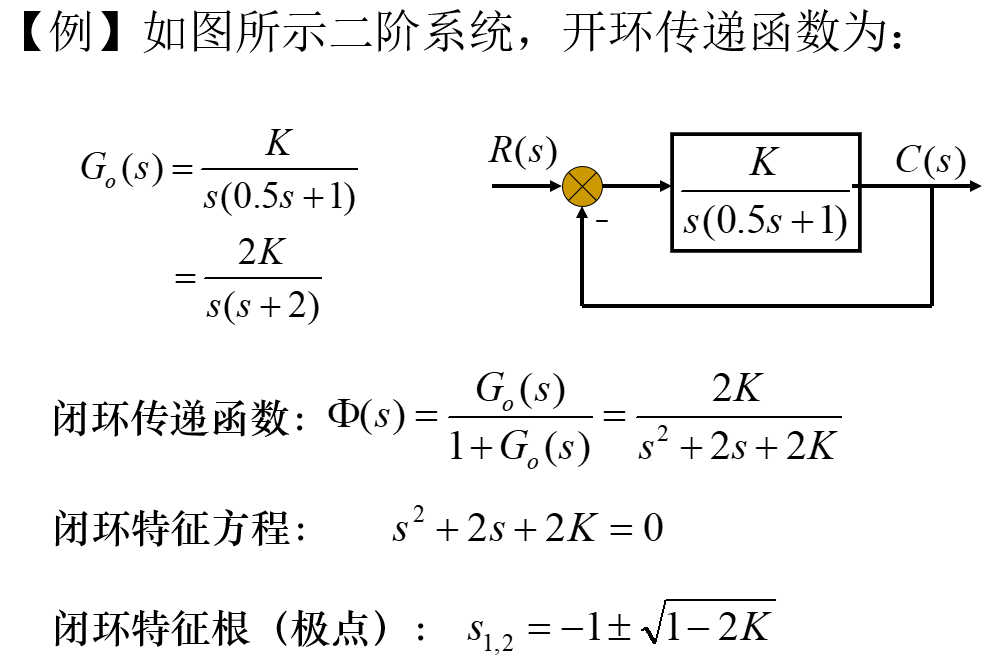
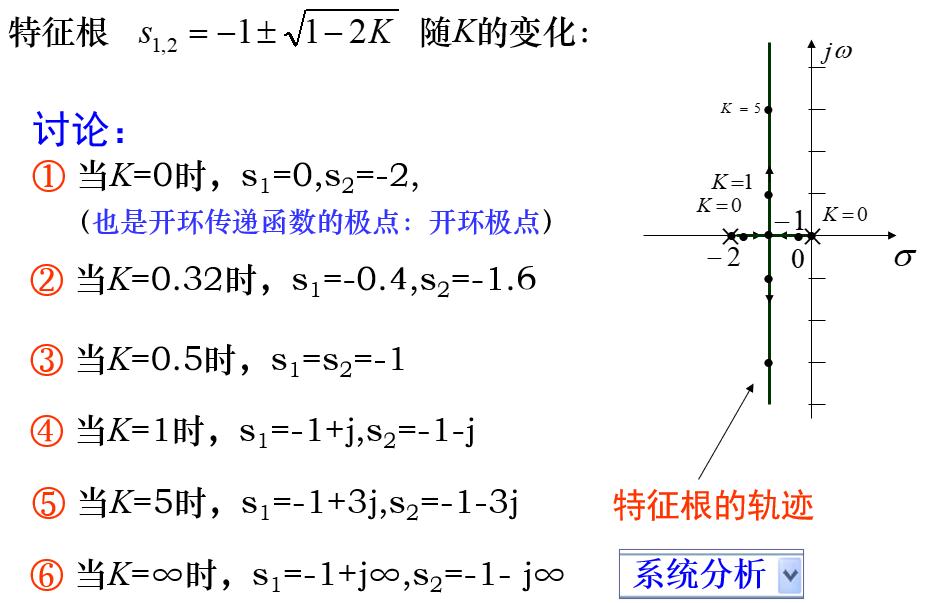
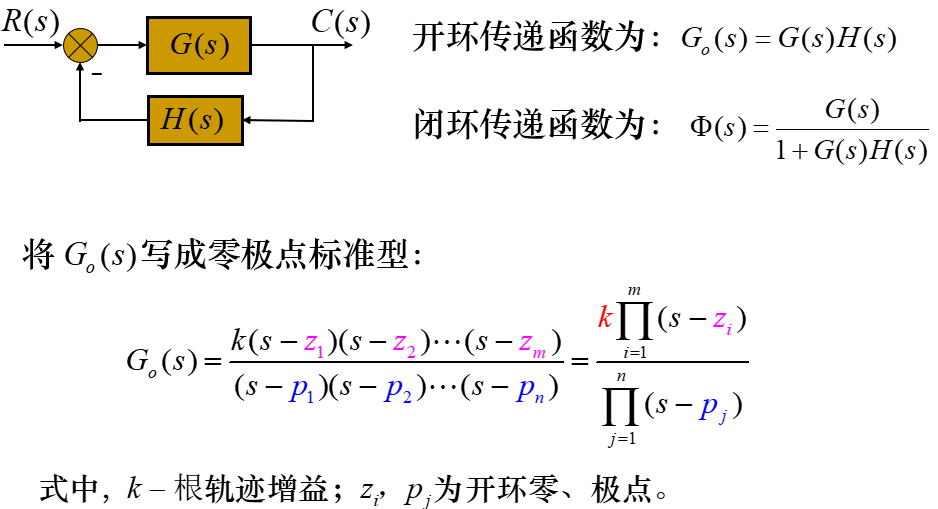
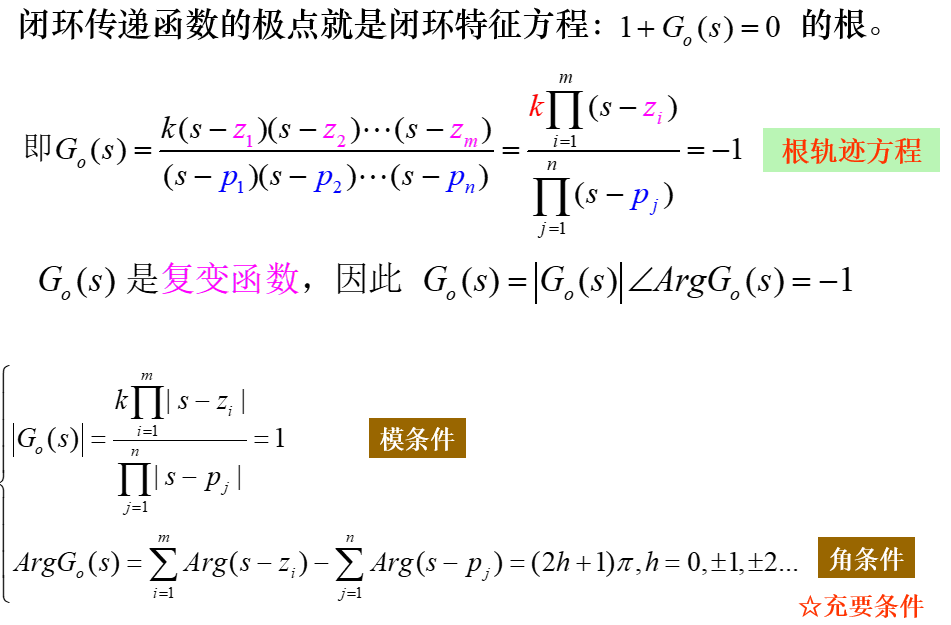
2.根轨迹方程
3.根轨迹方程的应用
1. 根据角条件绘制根轨迹(充要条件)
2. 根据模条件确定根轨迹增益

二,根轨迹的绘制规则
在根轨迹图中,“ ”表示开环极点,“ ”表示开环零点。粗实线表示根轨迹,箭头表示参数增加的方向。
【规则一】根轨迹有n条分支:
n阶实系数代数方程在复数域有n个根,因此n阶系统的根轨迹有n条分支。
【规则二】根轨迹对称于实轴:
实系数的闭环特征(代数)方程的根必对称于实轴。
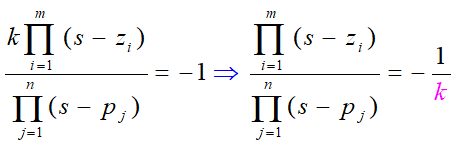
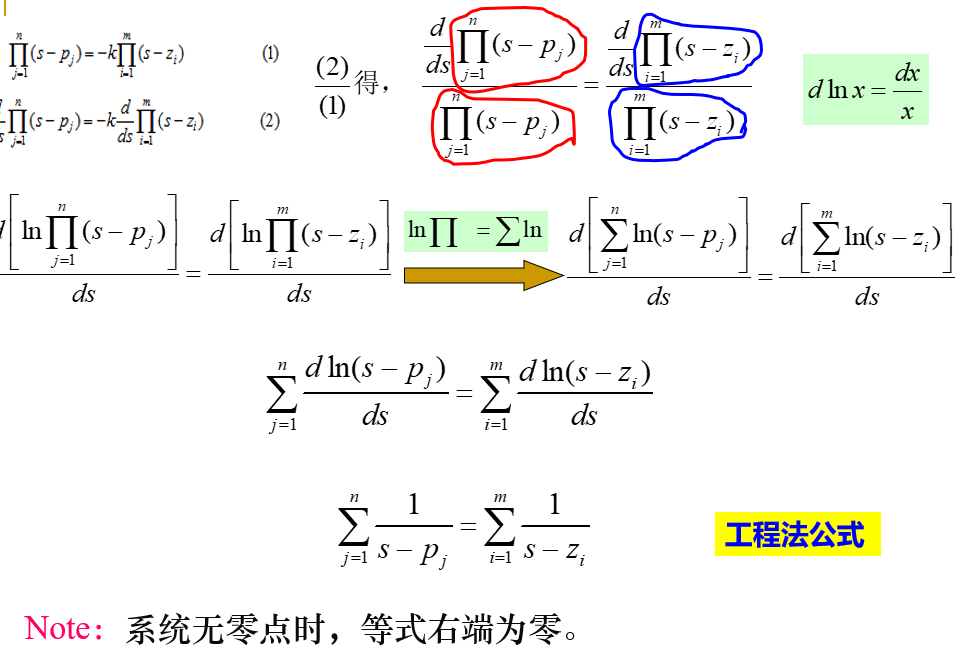
【规则三】根轨迹的起点和终点:
根轨迹方程为:
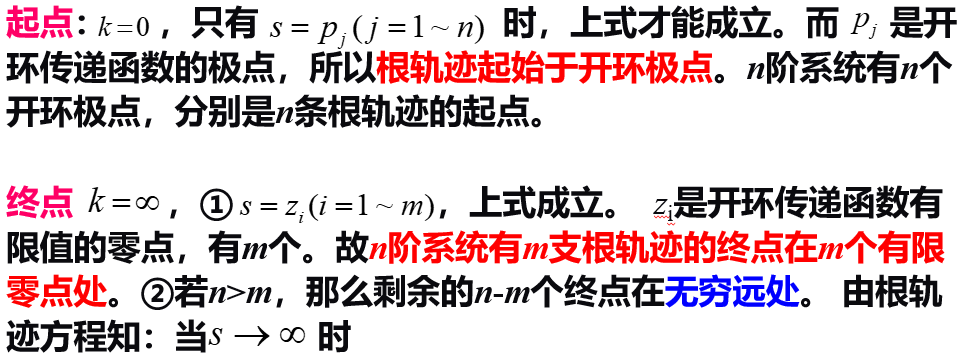
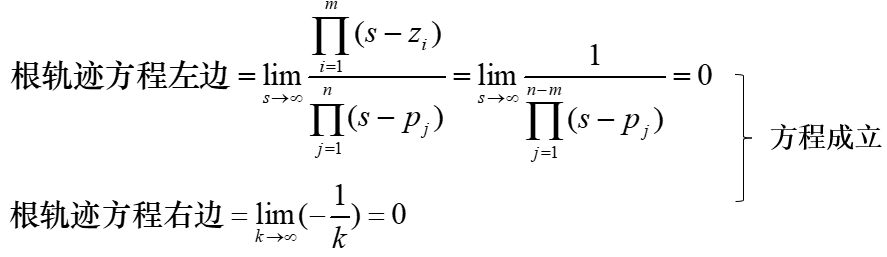
亦称系统有n-m个无限远零点。有限值零点加无穷远零点的个数等于极点数(=根轨迹条数=系统阶次n)。
【规则四】实轴上的根轨迹:
若实轴上某一线段的右边,开环零点和开环极点的数目之和为奇数(odd),则该线段为根轨迹的一部分。
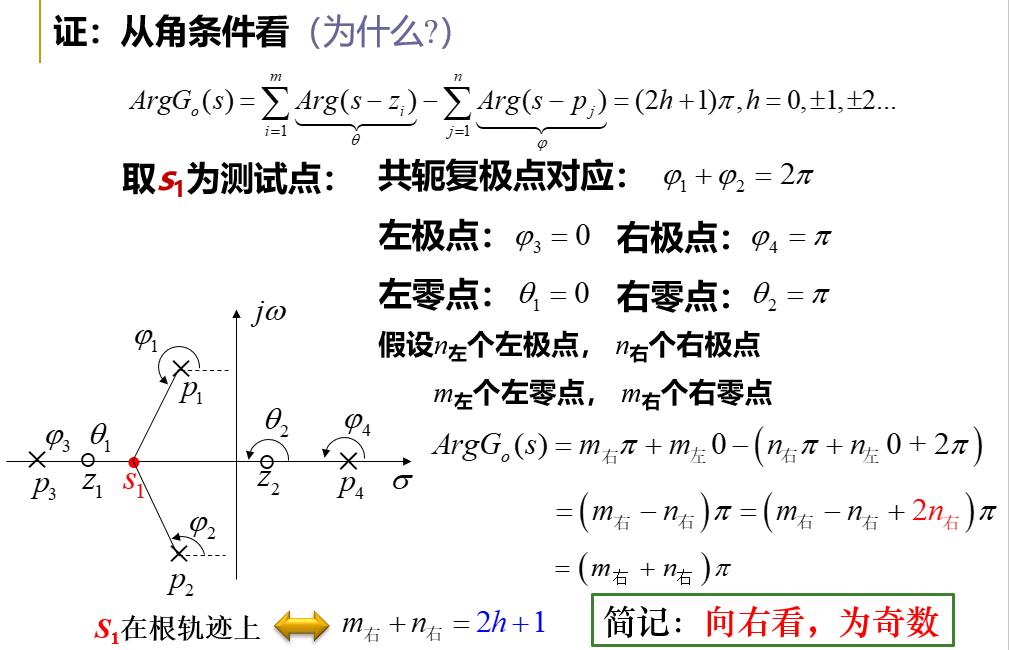
若实轴上某一线段的右边,开环零点和开环极点的数目之和为奇数,则该线段为根轨迹的一部分。
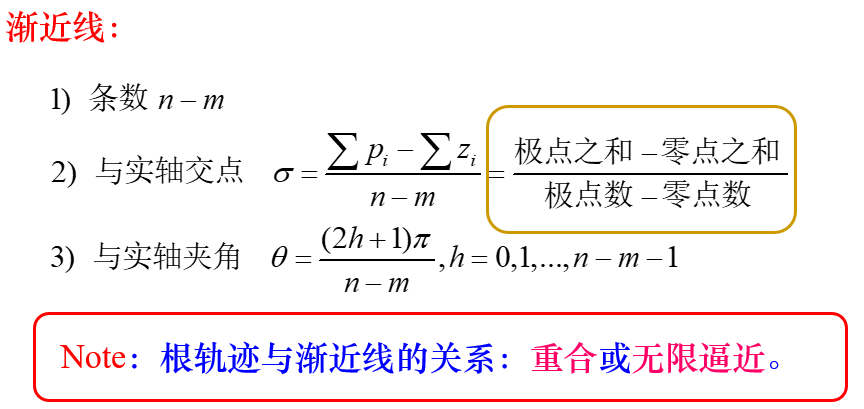
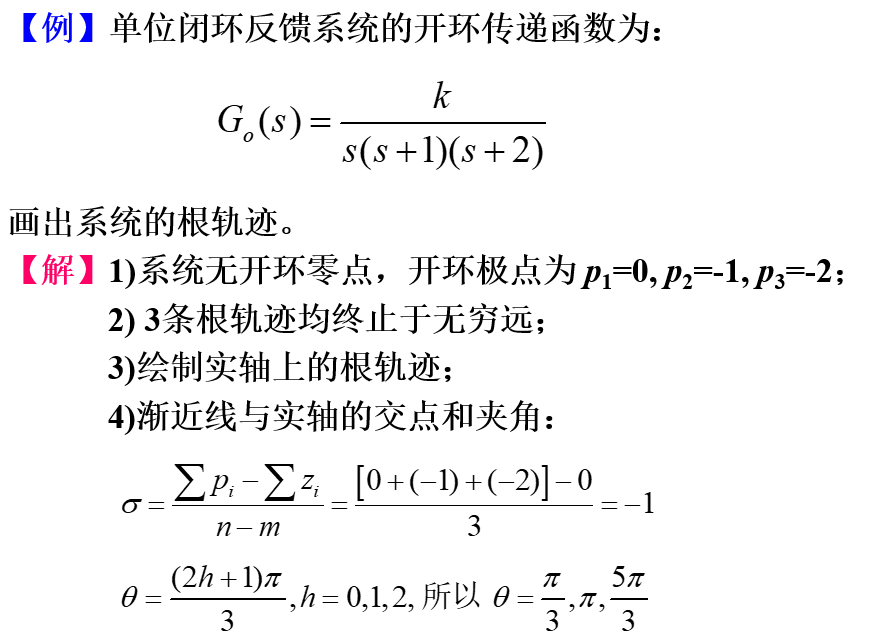
【规则五】根轨迹的渐近线:
k→∞时趋向无穷远处的根轨迹共有n-m条。这n-m条根轨迹趋向无穷远的方向由渐近线决定。
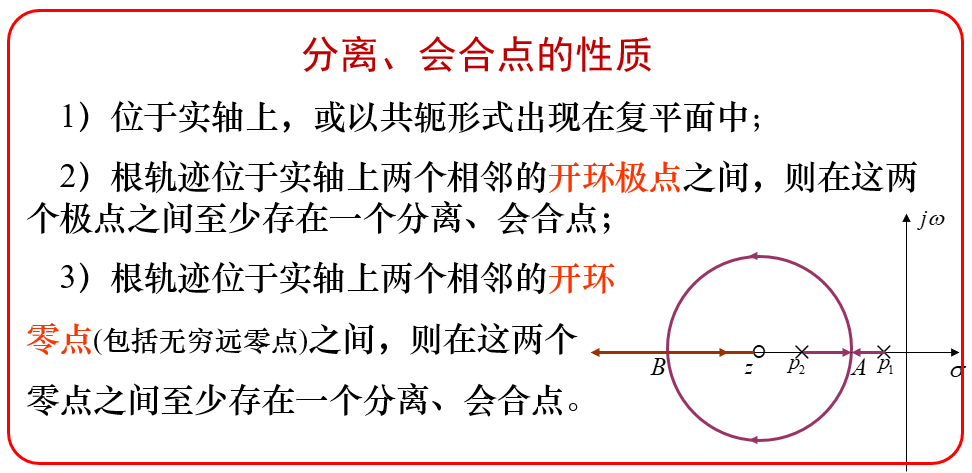
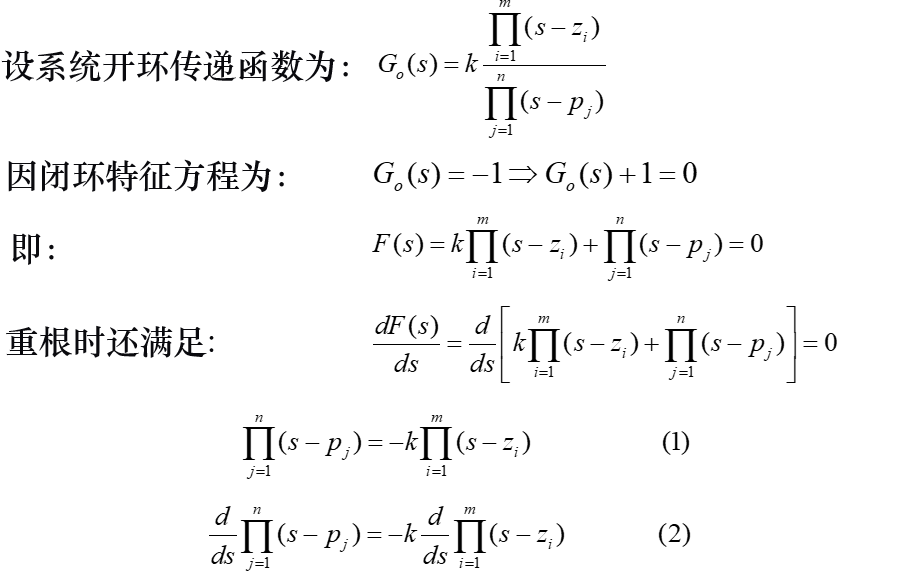
【规则六】根轨迹的分离、会合点:
不同的根轨迹分支在s平面上相交的点,称为根轨迹的分离、会合点。
分离、会合点的求法:
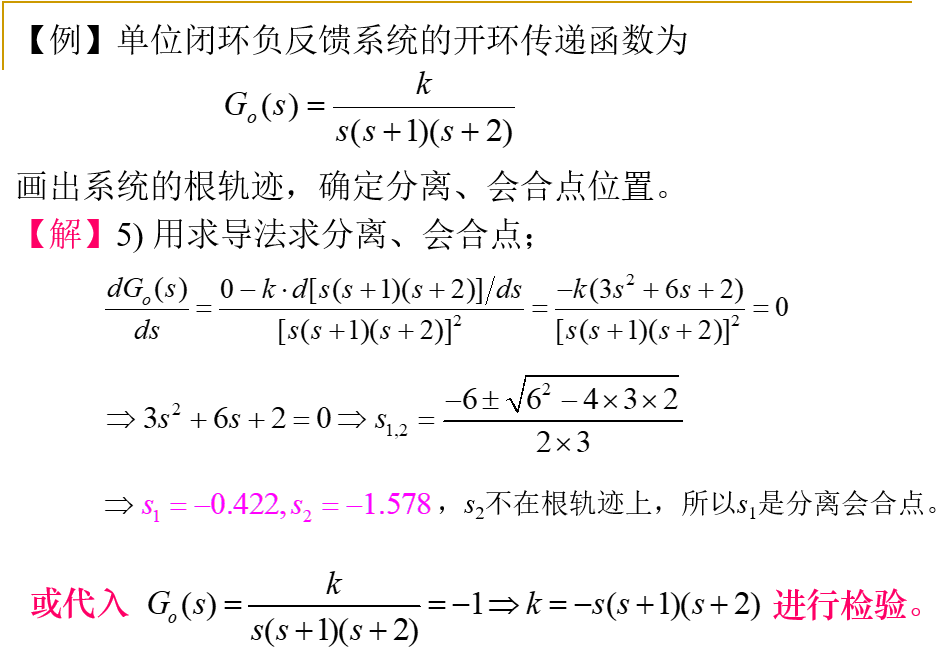
①求导法:根轨迹在实轴上的分离、会合点表示这些点是闭环特征方程的重根点。
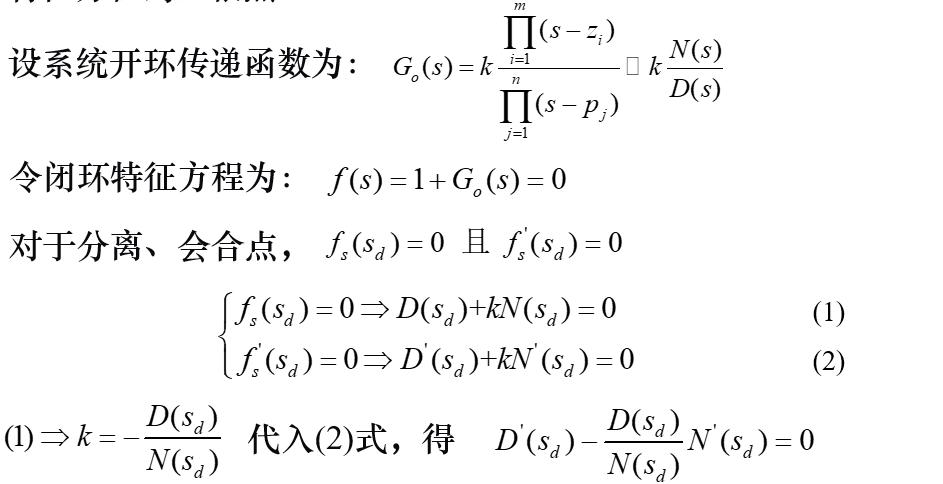
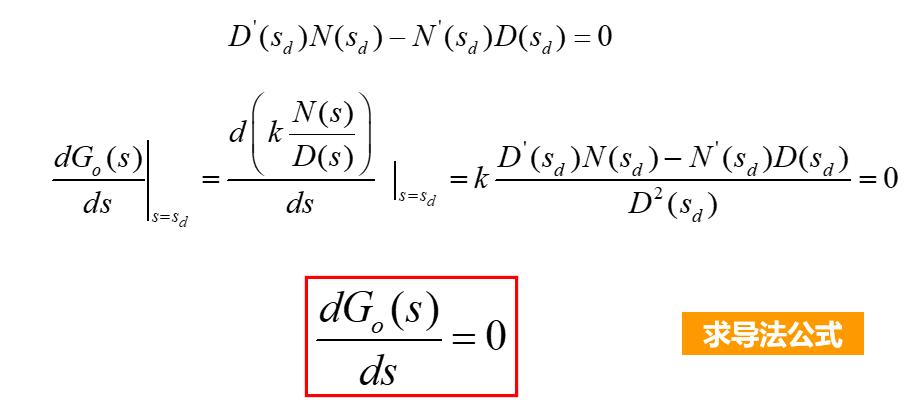
注意:由上式可求得的点是分离、会合点必要条件,还需求出这些点对应的增益,若增益为大于零的实数,则所求出的点为分离、会合点。
②工程法:

定理:当系统有2个开环极点、 1个或2个开环零点,并且在复平面上有根轨迹时,则复平面上的根轨迹一定是以零点为圆心的圆弧
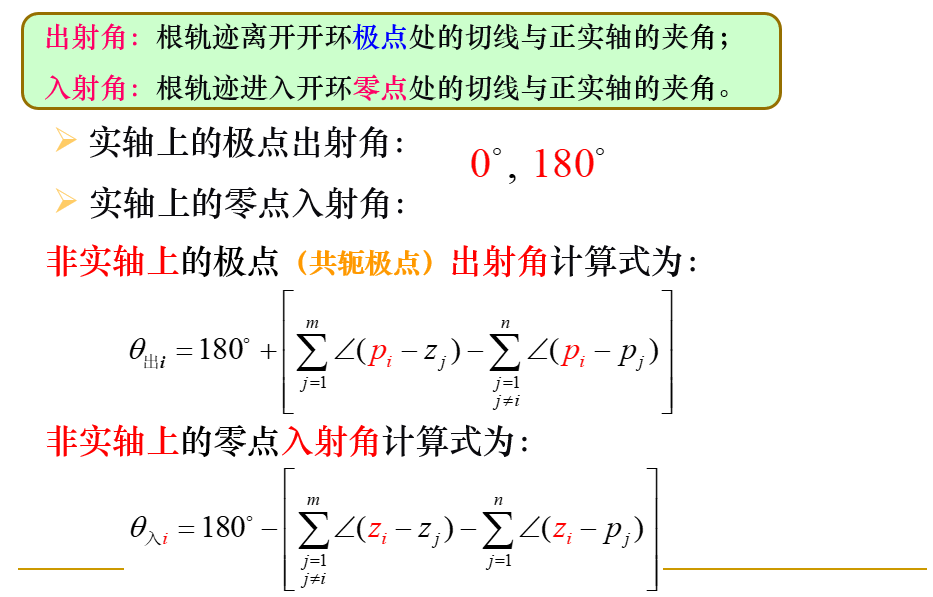
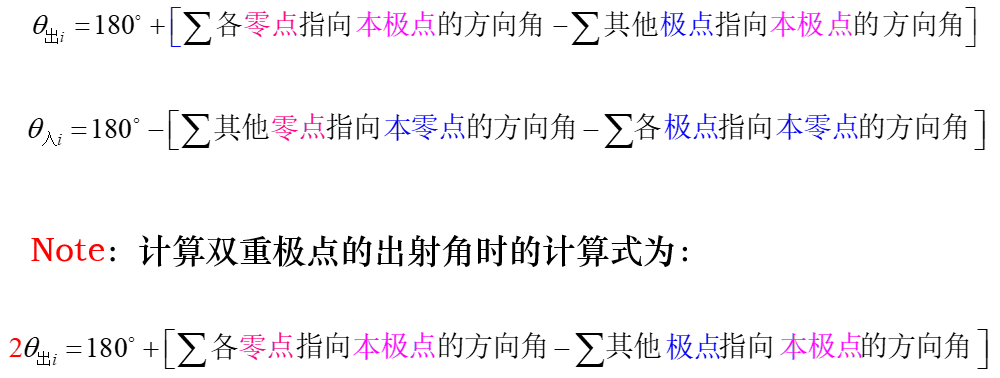
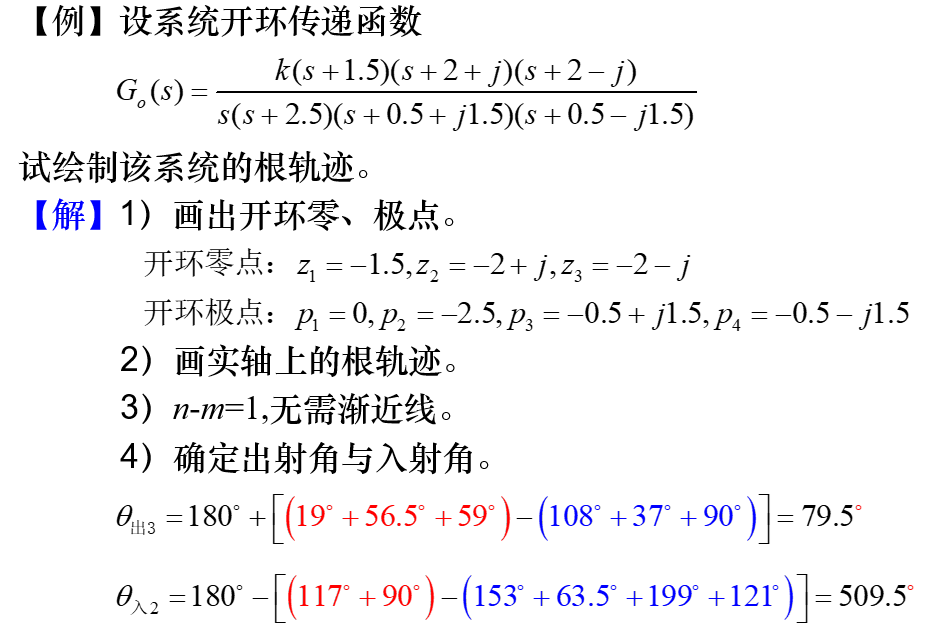
【规则七】出射角(起始角)和入射角(终止角):
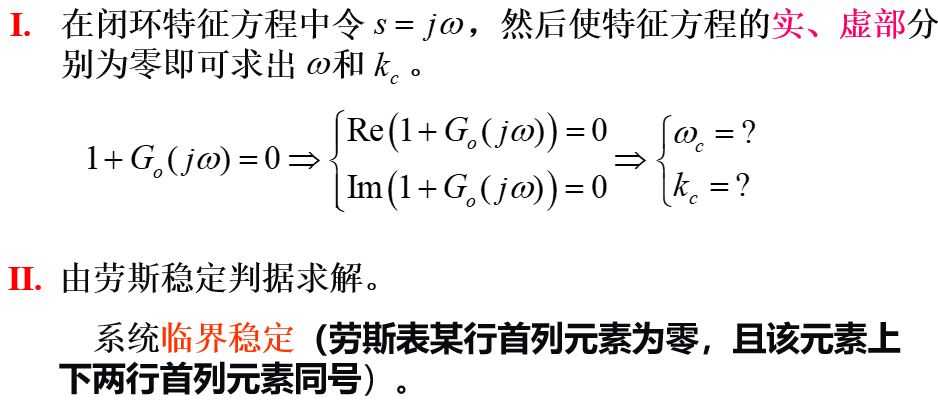
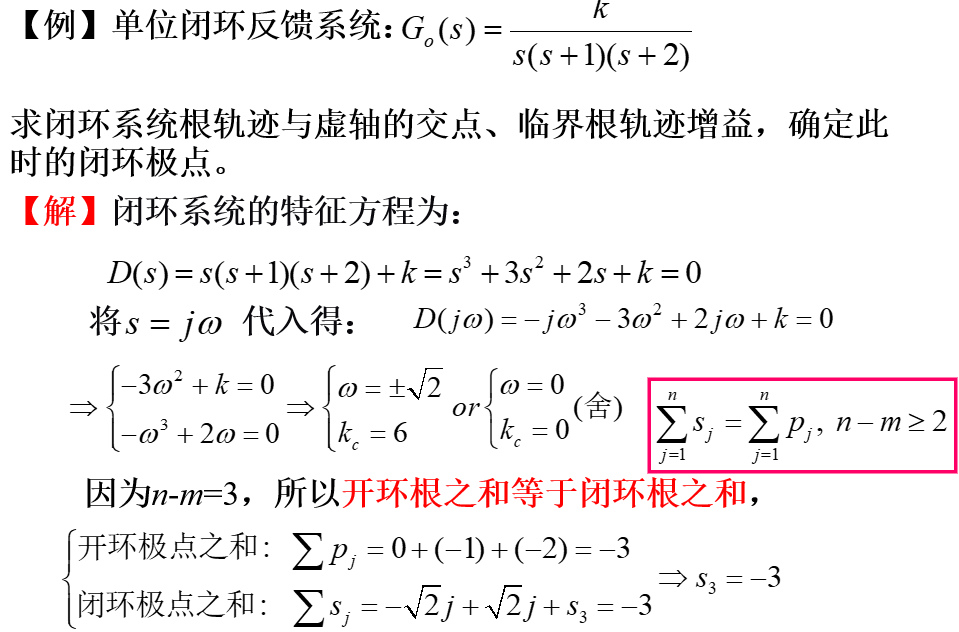
【规则八】根轨迹与虚轴的交点:
根轨迹和虚轴相交时,闭环特征方程有一对共轭纯虚根,系统处于临界稳定状态。这时的增益 称为临界根轨迹增益。


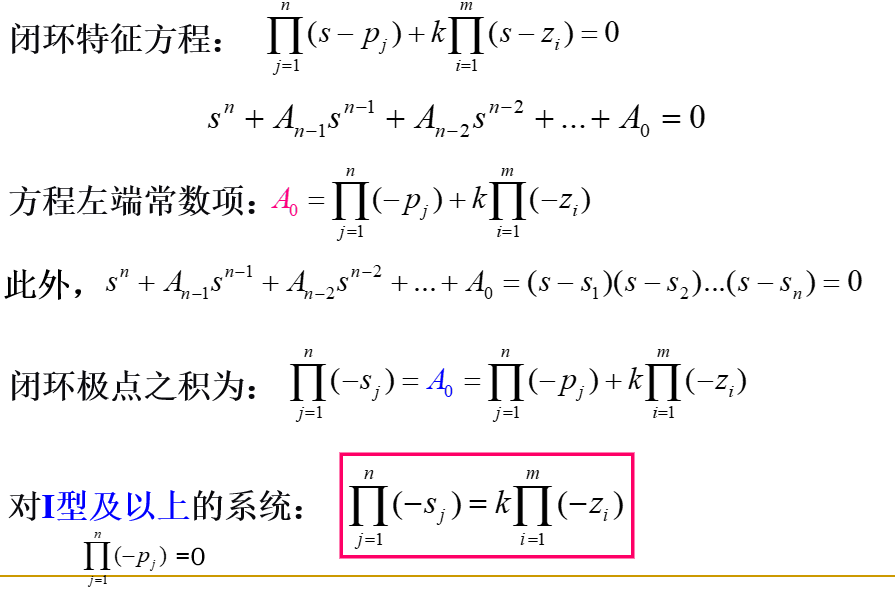
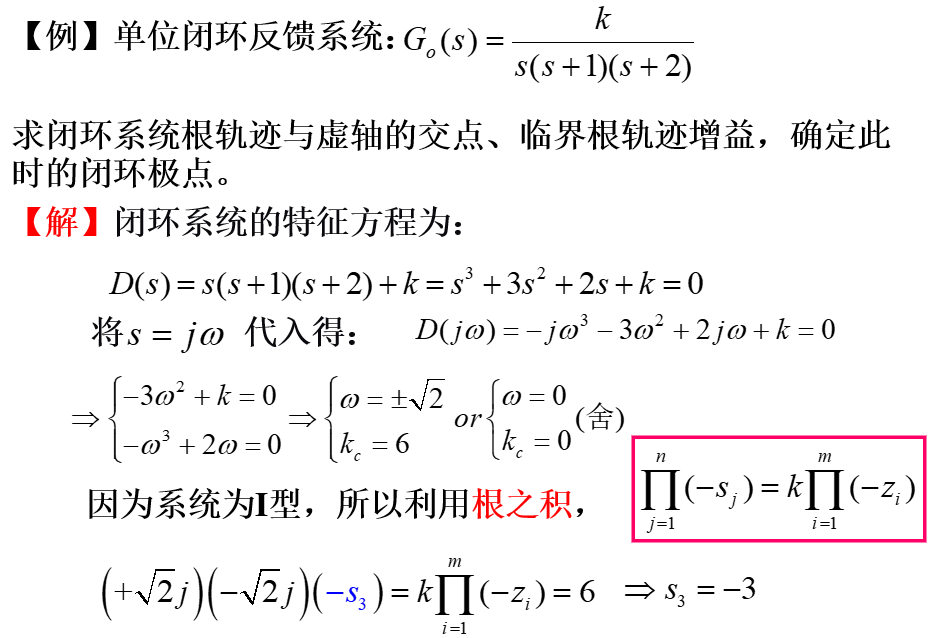
【规则九】根之和与根之积:
小 结 :

三,系统零极点分布与响应的关系
控制系统的闭环极点、零点与系统的稳定性及动态性能有密切关系。闭环零点与开环零点相同,闭环极点由根轨迹方程表示出来。
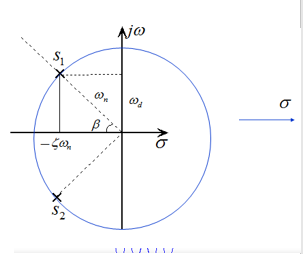
闭环极点对系统阶跃响应的影响:
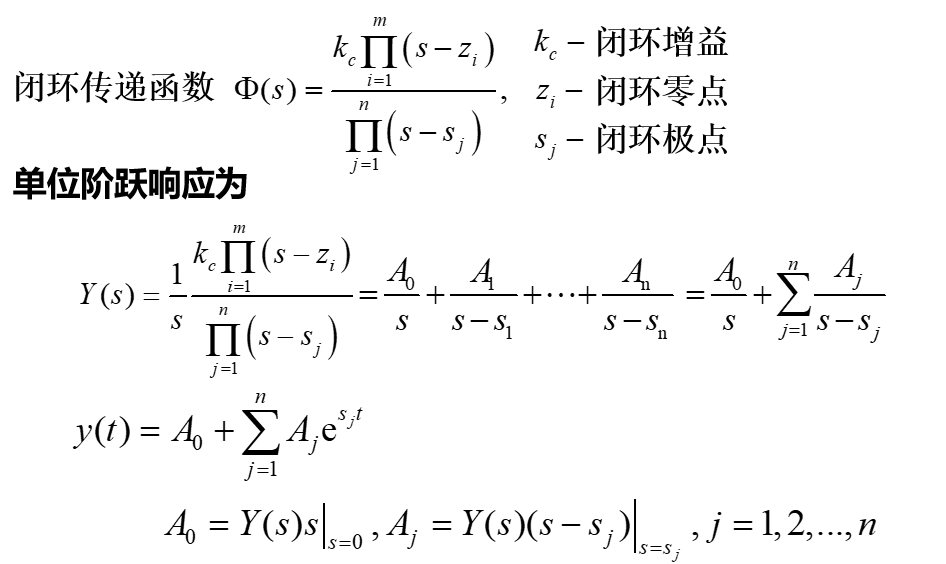
单位阶跃响应为:
(1)稳定性:sj应位于s左半平面;
(2)快速性:极点尽可能远离虚轴;
(3)平稳性:振荡要小,接近最佳阻尼比;
(4)利用闭环主导极点进行高阶系统的近似处理;
(5)闭环零点可以削弱其附近闭环极点对系统的影响(对应的留数小)。
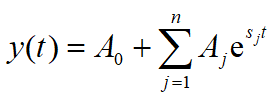
闭环零点对系统阶跃响应的影响:

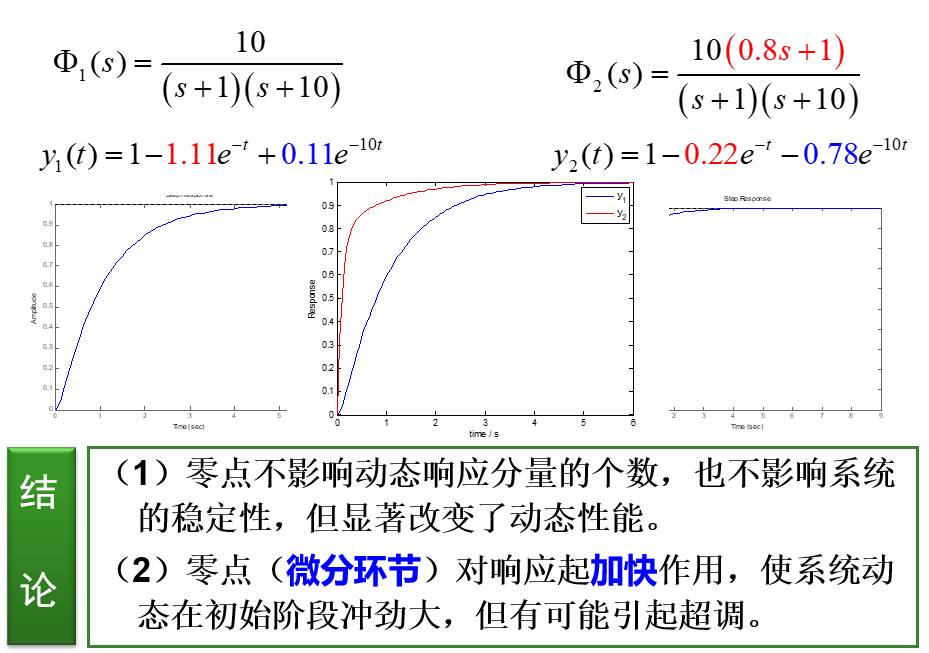
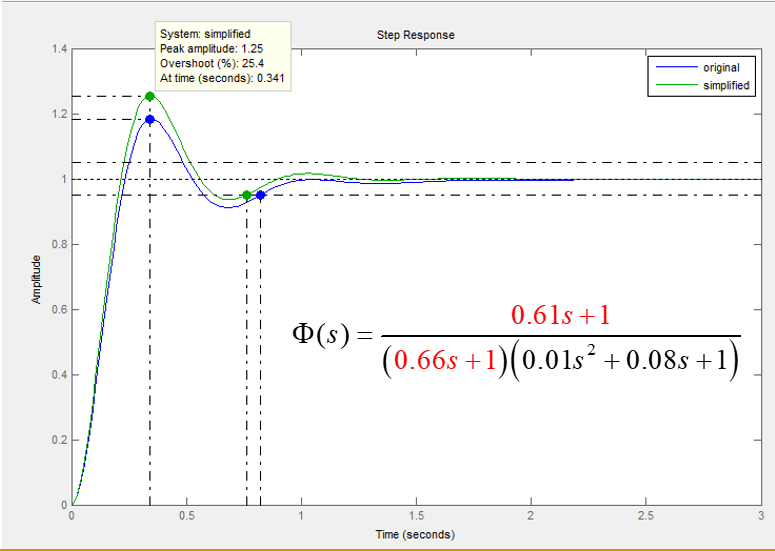
闭环偶极子:
闭环偶极子:复平面上很接近的一对闭环零极点
相对于其他零极点,相互距离在1/10以下的一对闭环偶极子对系统响应的影响可以忽略。
四,利用根轨迹解决工程问题
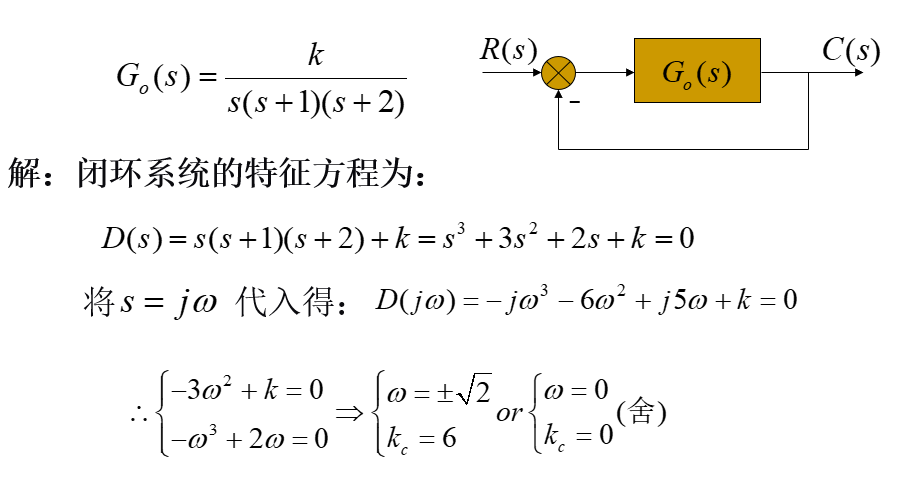
一、求控制参数(增益)的稳定边界
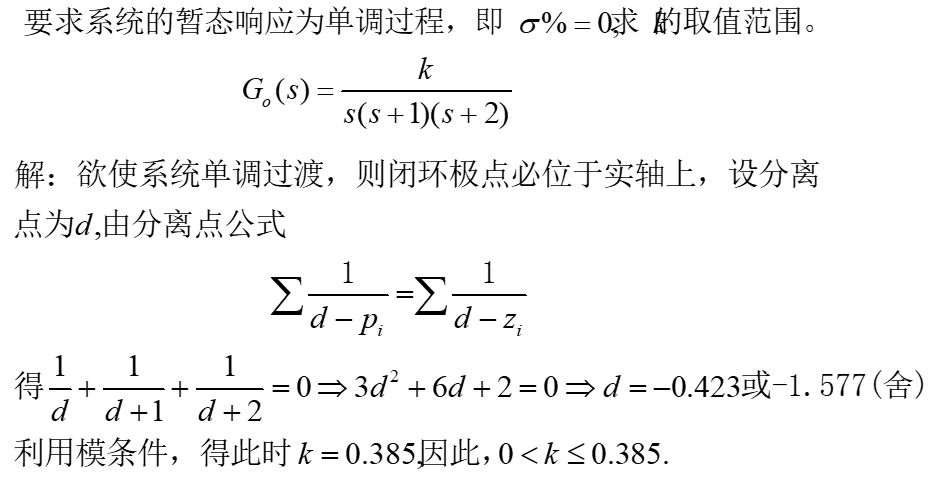
二、使系统具有单调过渡过程的增益范围:
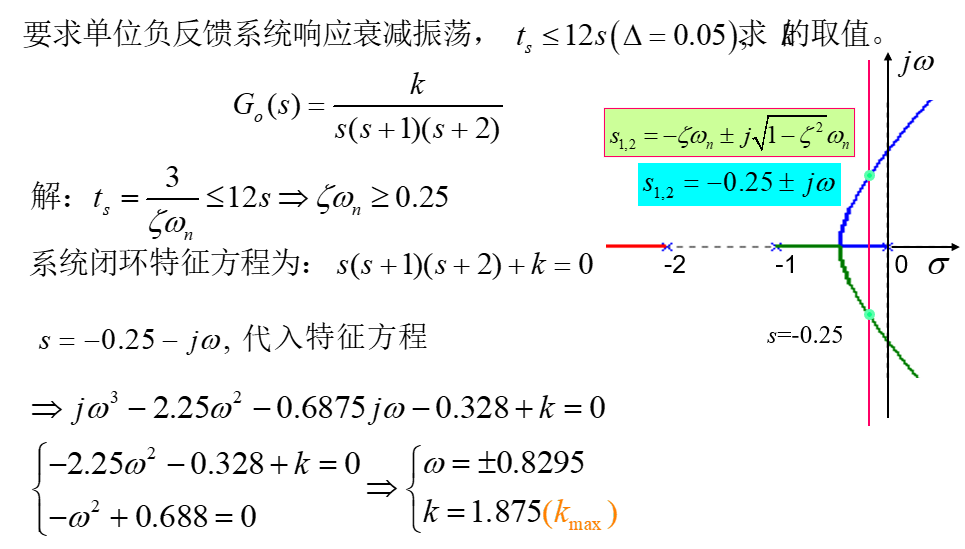
三、满足调整时间要求的控制参数(增益):
四、满足超调量要求的系统增益:
利用根轨迹解决工程问题,实际上是根据系统性能指标的要求,求出主导极点在s平面的分布区域
五,广义根轨迹
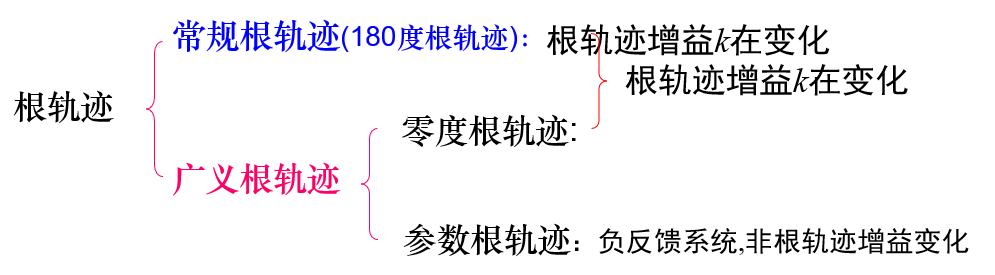
一、参数(量)根轨迹的绘制:
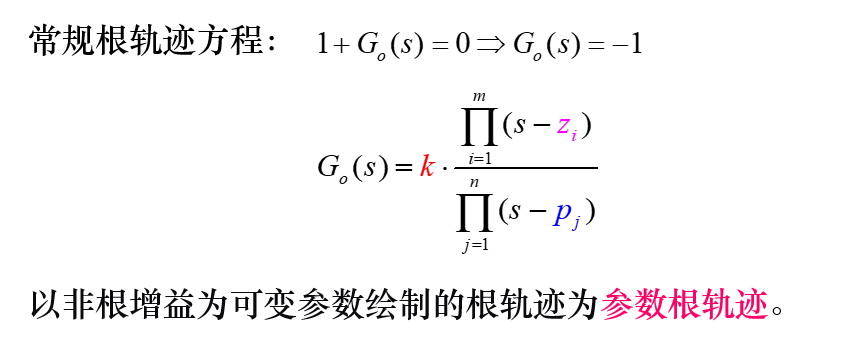
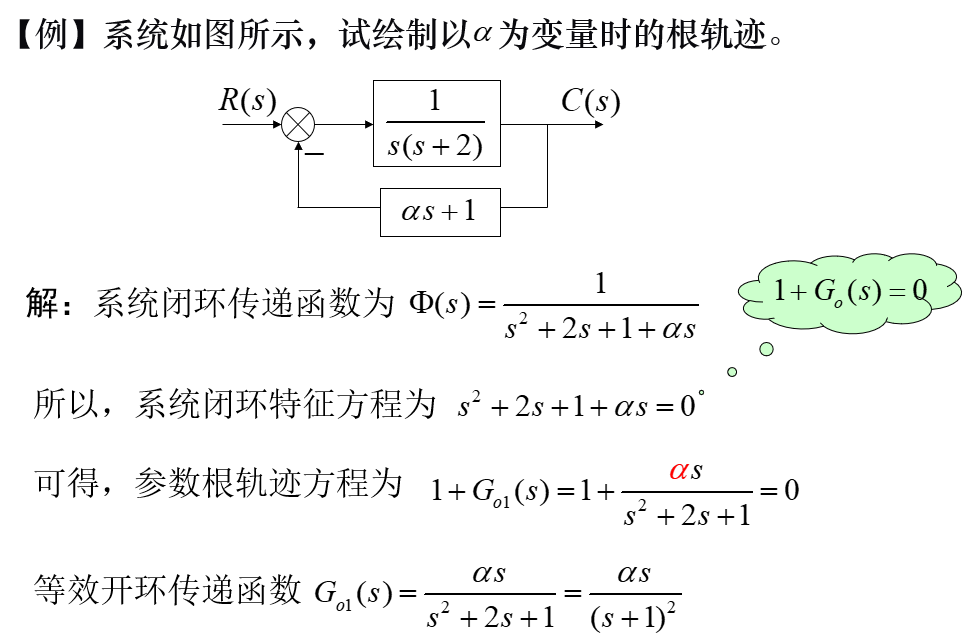
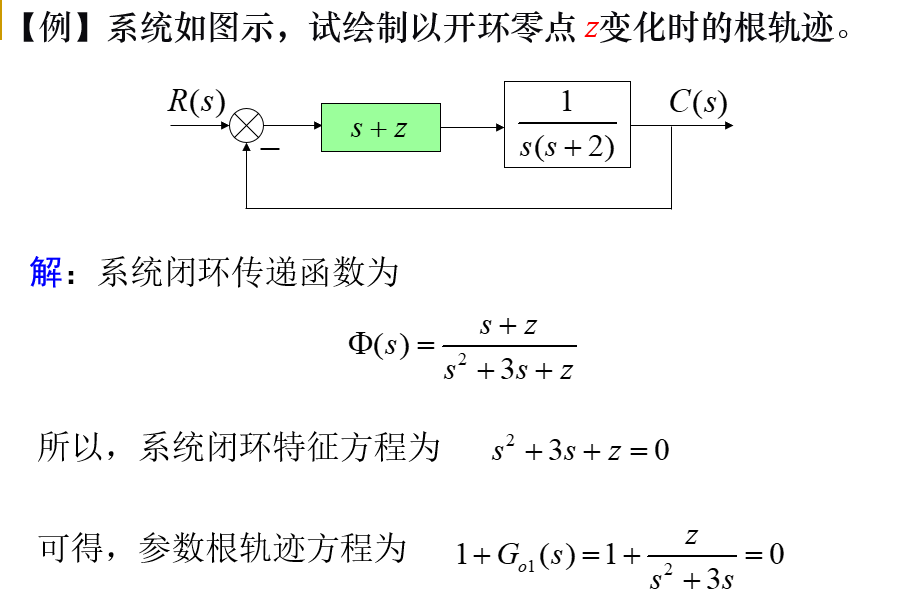
绘制参数根轨迹,需由系统的闭环特征方程导出一个新的等效开环传递函数Go1(s)。 在Go1(s)中,可变参数的位置与常规根轨迹中的根增益 k 位置相同。
二、零度根轨迹:
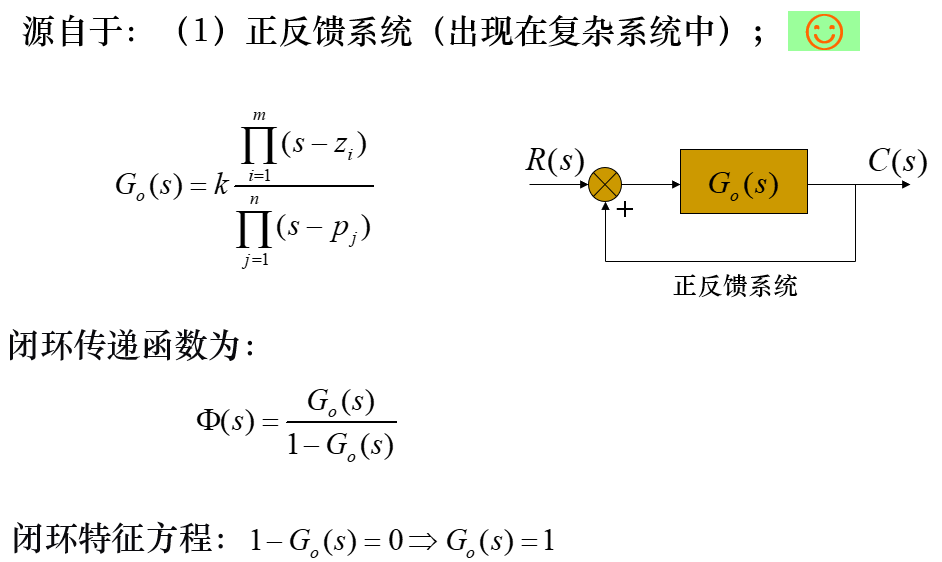
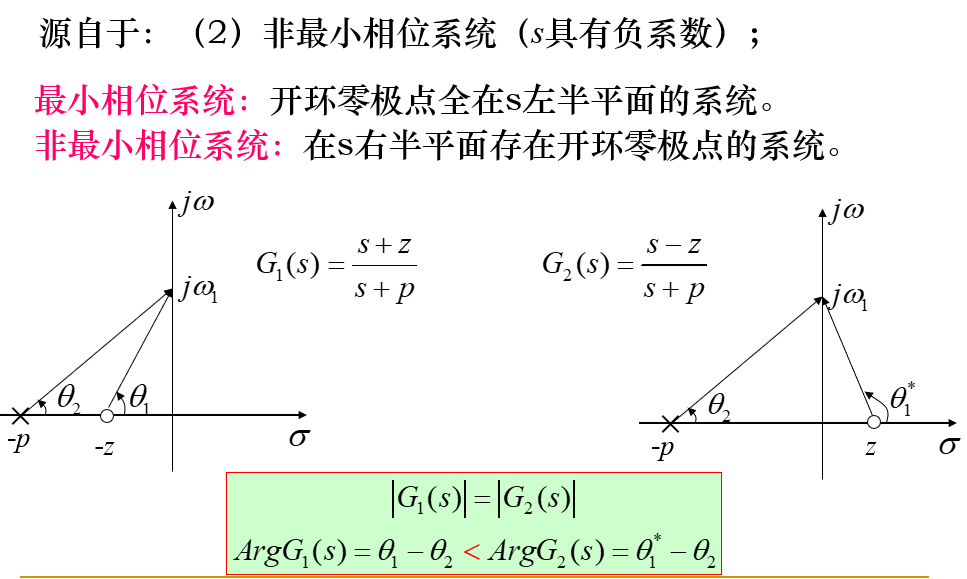
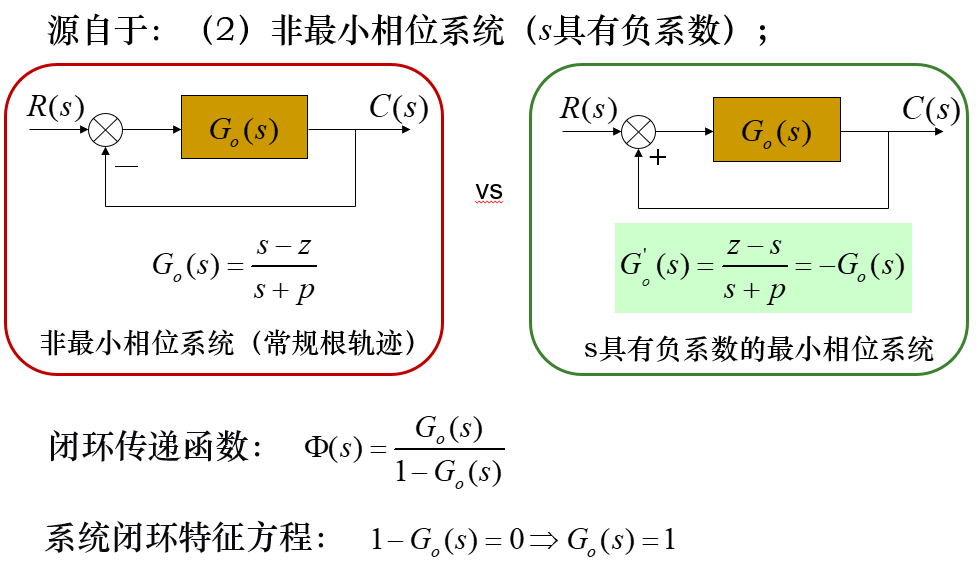
零度根轨迹的绘制规则:

六,根轨迹校正
一、根轨迹的改造:
1、增加开环零点对根轨迹的影响:
1)改变了根轨迹在实轴上的分布;
2)改变了渐近线的条数、与实轴的交点、夹角;
3)可以抵消对系统不利的闭环极点(构成偶极子);
4)根轨迹左移(零点要适当),对稳定性有利;
2、增加开环极点对根轨迹的影响
1)改变了根轨迹的条数;
2)改变了根轨迹在实轴上的分布;
3)改变了渐近线的条数、与实轴的交点、夹角;
4)根轨迹右移(极点要适当),对稳定性不利;
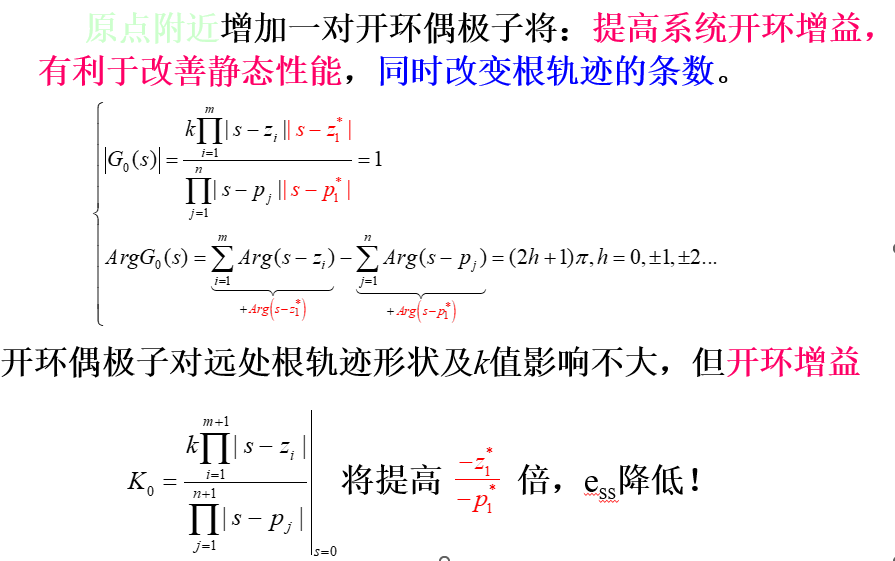
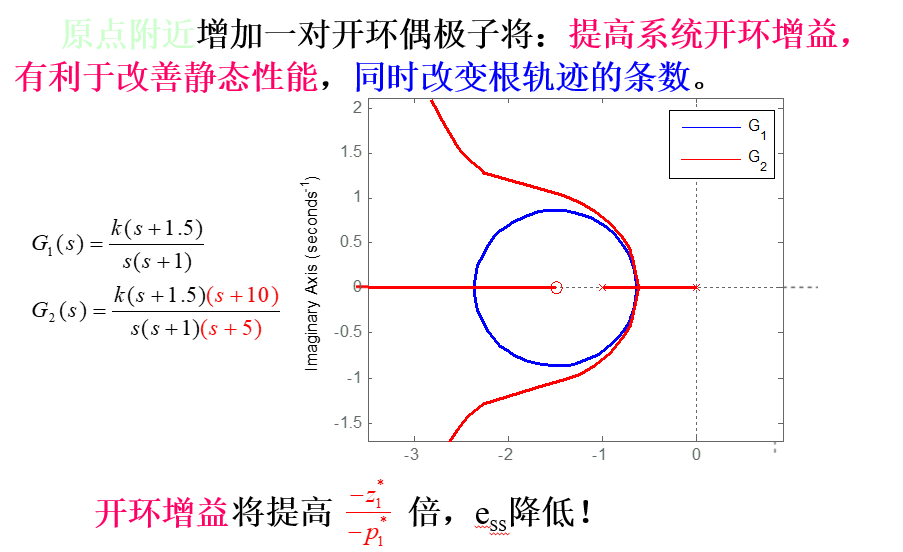
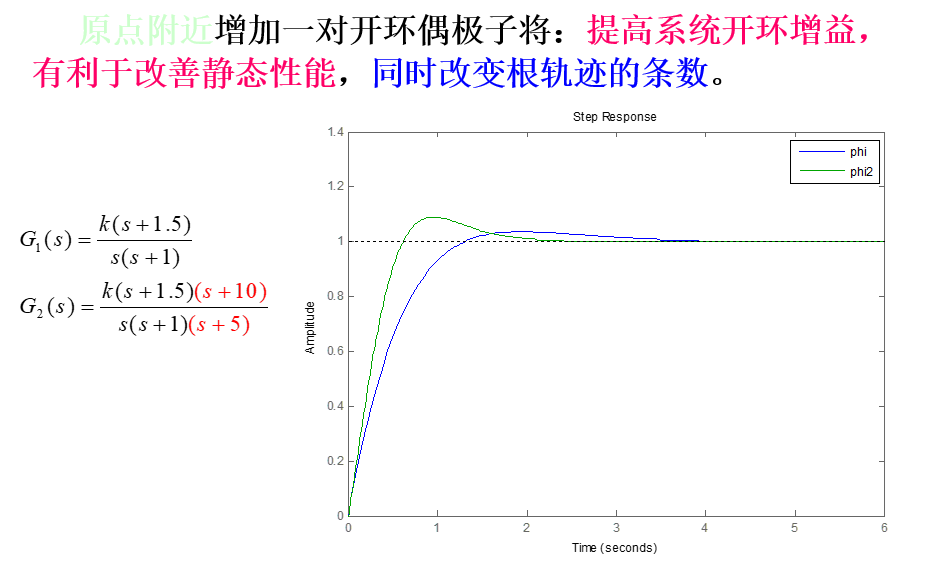
3、 增加开环偶极子对根轨迹的影响

二、根轨迹校正反馈系统
step: 1)暂态性能指标→期望的闭环主导极点;
2)绘制原系统的根轨迹,确定是否增加校正装置;
3)校正后系统根轨迹通过期望闭环主导极点,检验开环比例系数是否满足静态指 标(否则,增加开环偶极子以改善之);
4)检验暂、静态指标。
![BUUCTF-Web-[极客大挑战 2019]Upload](https://img-blog.csdnimg.cn/688cdf469c6a469d84c665fd91b68e75.png)