1. 功能说明
本文示例将实现R310b样机四福来轮全向底盘绘制“探索者”空心字的功能。

2. 电子硬件
本实验中采用了以下硬件:
| 主控板 | Basra主控板(兼容Arduino Uno) |
| 扩展板 | Bigfish2.1扩展板 |
| SH-ST步进电机扩展板 | |
| 电池 | 11.1v动力电池 |
| 其它 | 步进电机、标准舵机、笔架 |
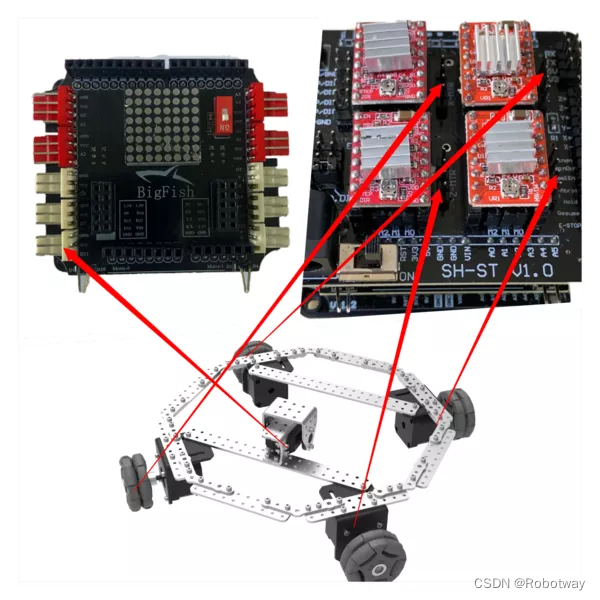
电路连接:
舵机连接在Bigfish扩展板的D11针脚上;4个步进电机与SH-ST扩展板的连接位置见下图:
3. 功能实现
在这里我们采用了一种算法,该算法的思路是:先建立一个平面坐标系,将我们所需要画的图形放置在该坐标系中,这样就可以确定该图形每个顶点的坐标,两个相邻的顶点之间确定一条直线,直线上各点坐标通过插补计算得到,然后画笔依次沿着这些坐标进行移动,完成绘制。所以在这个过程中,我们需要知道如何建立一个图形的坐标系,以及什么是插补计算。插补计算方法可参考 【R311】双轴XY平台-绘制斜向多边形 。
本实验将基于四福来轮全向底盘利用processing软件处理gcode文件后,进行绘制文字“探索者”。gcode文件的生成可参考【R312】三轴XYZ平台-生成gcode文件 。
3.1示例程序
编程环境:Arduino 1.8.19
下面给大家提供一个写字-探索者的参考例程(stepper_car_write.ino),将参考例程下载到主控板中:
/*------------------------------------------------------------------------------------
版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.
Distributed under MIT license.See file LICENSE for detail or copy at
https://opensource.org/licenses/MIT
by 机器谱 2023-03-09 https://www.robotway.com/
------------------------------*/
#include <Servo.h>
/*
* en:定义步进电机使能引脚
* servo_pin:定义舵机引脚
* stepper_count:定义步进电机数量
* stepperPulse_delay:定义步进电机脉冲生成间隔
* LINE_BUFFER_LENGTH:定义串口接收数据长度
*/
#define en 8
#define servo_pin 11
#define stepper_count 4
#define stepperPulse_delay 850
#define LINE_BUFFER_LENGTH 512
/*
* positive_x:定义正向 X 轴
* positive_y:定义正向 Y 轴
* negative_x:定义负向 X 轴
* negative_y:定义负向 Y 轴
*/
#define positive_x 0
#define positive_y 1
#define negative_x 2
#define negative_y 3
/*
* stepperDir_pin:定义步进电机方向引脚数组
* stepperStp_pin:定义步进电机步进引脚数组
* dir: x: 5, y: 6, z: 7, a: 13
* stp: x: 2, y: 3, z: 4, a: 12
*/
int stepperDir_pin[4] = {5, 6, 7, 13};
int stepperStp_pin[4] = {2, 3, 4, 12};
Servo myServo;
const int stepsPerRevolution = 3200; //定义步进电机每圈转动的步数,此处为16细分,每圈 3200 步
int penZup = 145; //定义舵机抬起角度
int penZdown = 150; //定义舵机放下角度
float LEAD = sqrt(2) * 58 * PI; //定义步进电机转动 1 圈,小车前进的距离,单位 mm
struct point {
float x;
float y;
};
struct point actuatorPos; // Current position of plothead
float Xmin = -60; //定义绘图范围,长120mm , 宽120mm
float Xmax = 60;
float Ymin = -60;
float Ymax = 60;
float Xpos = 0;
float Ypos = 0;
boolean verbose = true;
void setup() {
Serial.begin(9600); //开启串口通信,波特率为 9600
myServo.attach(servo_pin);
myServo.write(penZup);
for(int i=0;i<stepper_count;i++)
{
pinMode(stepperDir_pin[i], OUTPUT);
pinMode(stepperStp_pin[i], OUTPUT);
}
pinMode(en, OUTPUT);
digitalWrite(en, LOW);
delay(1000);
}
void loop()
{
delay(200);
char line[ LINE_BUFFER_LENGTH ];
char c;
int lineIndex;
bool lineIsComment, lineSemiColon;
lineIndex = 0;
lineSemiColon = false;
lineIsComment = false;
while (1) {
// 接受来自Grbl的串口数据
while ( Serial.available()>0 ) {
c = Serial.read();
if (( c == '\n') || (c == '\r') ) { // End of line reached
if ( lineIndex > 0 ) { // Line is complete. Then execute!
line[ lineIndex ] = '\0'; // Terminate string
if (verbose) {
//Serial.print( "Received : ");
Serial.println( line );
}
processIncomingLine( line, lineIndex );
lineIndex = 0;
}
else {
// Empty or comment line. Skip block.
}
lineIsComment = false;
lineSemiColon = false;
Serial.println("ok");
}
else {
if ( (lineIsComment) || (lineSemiColon) ) { // Throw away all comment characters
if ( c == ')' ) lineIsComment = false; // End of comment. Resume line.
}
else {
if ( c <= ' ' ) { // Throw away whitepace and control characters
}
else if ( c == '/' ) { // Block delete not supported. Ignore character.
}
else if ( c == '(' ) { // Enable comments flag and ignore all characters until ')' or EOL.
lineIsComment = true;
}
else if ( c == ';' ) {
lineSemiColon = true;
}
else if ( lineIndex >= LINE_BUFFER_LENGTH-1 ) {
Serial.println( "ERROR - lineBuffer overflow" );
lineIsComment = false;
lineSemiColon = false;
}
else if ( c >= 'a' && c <= 'z' ) { // Upcase lowercase
line[ lineIndex++ ] = c-'a'+'A';
}
else {
line[ lineIndex++ ] = c;
}
}
}
}
}
}
//串口数据处理函数
void processIncomingLine( char* line, int charNB ) {
int currentIndex = 0;
char buffer[ 64 ]; // Hope that 64 is enough for 1 parameter
struct point newPos;
newPos.x = 0.0;
newPos.y = 0.0;
// Needs to interpret
// G1 for moving
// G4 P300 (wait 150ms)
// G1 X60 Y30
// G1 X30 Y50
// M300 S30 (pen down)
// M300 S50 (pen up)
// Discard anything with a (
// Discard any other command!
while( currentIndex < charNB ) {
switch ( line[ currentIndex++ ] ) { // Select command, if any
case 'U':
penUp();
break;
case 'D':
penDown();
break;
case 'G':
buffer[0] = line[ currentIndex++ ]; // /!\ Dirty - Only works with 2 digit commands
// buffer[1] = line[ currentIndex++ ];
// buffer[2] = '\0';
buffer[1] = '\0';
switch ( atoi( buffer ) ){ // Select G command
case 0: // G00 & G01 - Movement or fast movement. Same here
case 1:
// /!\ Dirty - Suppose that X is before Y
char* indexX = strchr( line+currentIndex, 'X' ); // Get X/Y position in the string (if any)
char* indexY = strchr( line+currentIndex, 'Y' );
if ( indexY <= 0 ) {
newPos.x = atof( indexX + 1);
newPos.y = actuatorPos.y;
}
else if ( indexX <= 0 ) {
newPos.y = atof( indexY + 1);
newPos.x = actuatorPos.x;
}
else {
newPos.y = atof( indexY + 1);
indexY = '\0';
newPos.x = atof( indexX + 1);
}
drawLine(newPos.x, newPos.y );
// Serial.println("ok");
actuatorPos.x = newPos.x;
actuatorPos.y = newPos.y;
break;
}
break;
case 'M':
buffer[0] = line[ currentIndex++ ]; // /!\ Dirty - Only works with 3 digit commands
buffer[1] = line[ currentIndex++ ];
buffer[2] = line[ currentIndex++ ];
buffer[3] = '\0';
switch ( atoi( buffer ) ){
case 300:
{
char* indexS = strchr( line+currentIndex, 'S' );
float Spos = atof( indexS + 1);
// Serial.println("ok");
if (Spos == 30) {
penDown();
}
if (Spos == 50) {
penUp();
}
break;
}
case 114: // M114 - Repport position
Serial.print( "Absolute position : X = " );
Serial.print( actuatorPos.x );
Serial.print( " - Y = " );
Serial.println( actuatorPos.y );
break;
default:
Serial.print( "Command not recognized : M");
Serial.println( buffer );
}
}
}
}
//直线插补函数,参数为点坐标值
void drawLine(float x1, float y1)
{
int dx, dy, n, k, i, f, stepInc;
if (x1 >= Xmax) {
x1 = Xmax;
}
if (x1 <= Xmin) {
x1 = Xmin;
}
if (y1 >= Ymax) {
y1 = Ymax;
}
if (y1 <= Ymin) {
y1 = Ymin;
}
x1 = (int)(x1/LEAD*stepsPerRevolution);
y1 = (int)(y1/LEAD*stepsPerRevolution);
float x0 = Xpos;
float y0 = Ypos;
Serial.print("X = ");
Serial.println(Xpos);
Serial.print("Y = ");
Serial.println(Ypos);
dx = abs(x1-x0);
dy = abs(y1-y0);
n = abs(dx+dy);
if(x1 >= x0)
{
k = y1 >= y0 ? 1:4;
}
else
{
k = y1 >= y0 ? 2:3;
}
for(i=0,f=0;i<n;i+=1)
{
if(f>=0)
{
switch(k)
{
case 1:
stepper_move(positive_x, 1);
f = f - dy;
//Serial.println("+x");
break;
case 2:
stepper_move(negative_x, 1);
f = f - dy;
//Serial.println("-x");
break;
case 3:
stepper_move(negative_x, 1);
f = f - dy;
//Serial.println("-x");
break;
case 4:
stepper_move(positive_x, 1);
f = f - dy;
//Serial.println("+x");
break;
default:break;
}
}
else
{
switch(k)
{
case 1:
stepper_move(positive_y, 1);
f = f + dx;
//Serial.println("+y");
break;
case 2:
stepper_move(positive_y, 1);
f = f + dx;
//Serial.println("+y");
break;
case 3:
stepper_move(negative_y, 1);
f = f + dx;
//Serial.println("-y");
break;
case 4:
stepper_move(negative_y, 1);
f = f +dx;
//Serial.println("-y");
break;
default:break;
}
}
}
Xpos = x1;
Ypos = y1;
}
//小车行进方向控制函数
void stepper_dir(int positiveDir_x, int positiveDir_y, int negativeDir_x, int negativeDir_y)
{
int dir_value[] = {positiveDir_x, positiveDir_y, negativeDir_x, negativeDir_y};
for(int i=0;i<stepper_count;i++)
{
//Serial.print(dir_value[i]);
//Serial.print(",");
digitalWrite(stepperDir_pin[i], dir_value[i]);
}
//Serial.println();
for(int j=0;j<stepper_count;j++)
{
digitalWrite(stepperStp_pin[j], HIGH);
}
delayMicroseconds(stepperPulse_delay);
for(int j=0;j<stepper_count;j++)
{
digitalWrite(stepperStp_pin[j], LOW);
}
delayMicroseconds(stepperPulse_delay);
}
//步进电机转动函数,参数 dir_xy:步进电机转动方向,steps:步进电机转动步数
void stepper_move(int dir_xy, int steps)
{
for(int i=0;i<abs(steps);i++)
{
switch(dir_xy)
{
case 0:
stepper_dir(1, 1, 0, 0); // X 正方向
break;
case 1:
stepper_dir(1, 0, 1, 0); // Y 正方向
break;
case 2:
stepper_dir(0, 0, 1, 1); // X 负方向
break;
case 3:
stepper_dir(0, 1, 0, 1); // Y 负方向
break;
default:break;
}
}
}
//舵机抬笔函数
void penUp()
{
myServo.write(penZup);
}
//舵机落笔函数
void penDown()
{
myServo.write(penZdown);
}3.2 图形绘制
接下来我们将通过上位机的processing软件发送生成文字“探索者”的 gcode文件给四福来轮全向底盘进行图形绘制。具体操作步骤可参考【R312】三轴XYZ平台-绘制空心字 。
4. 资料内容
①写字-例程源代码
②软件资料包
资料内容详见:四福来轮全向底盘(十字)-写字