文章目录
- 背景
- 源码分析(第一个启动程序 init)
- 1.main.cpp
- 2.init.cpp
- 3.property_service.cpp
- 4,LoadBootScripts
- 拓展知识
- Android的架构图
- I/O多路复用
- 总结
离职找工作间隙,停下脚步整理下自己的知识体系,把之前忙于开发未曾整理的知识都记录成文档,分享出来,希望可以帮助到大家。另外也打算把写了几年的 简书 整理到CSDN这边来。
背景
阅读源码是提高技术能力最好的学习材料。长久的业务开发经常所面对常用Api的调用,UI搭建,架构。随着深入,仅仅只会Api的调用是无法满足需求的,如果想成为高级开发工程师,那么阅读系统源码是必须要经历的过程。例如我们在开发的过程中遇到的问题,有很多是需要通过分析源码解决,还有性能优化,卡顿优化,ANR等。我们也可以从阅读源码的过程中学到很多知识,能够做一些看似无法实现的功能,例如一些数据结构的最优解、插件化、保活等。
源码分析(第一个启动程序 init)
1.main.cpp
main.cpp入口
—>first_stage_init.cpp 挂载文件系统 创建目录 启动selinux_setup安全权限相关
int main(int argc, char** argv) {
#if __has_feature(address_sanitizer)
__asan_set_error_report_callback(AsanReportCallback);
#endif
if (!strcmp(basename(argv[0]), "ueventd")) {
return ueventd_main(argc, argv);
}
if (argc > 1) {
if (!strcmp(argv[1], "subcontext")) {
android::base::InitLogging(argv, &android::base::KernelLogger);
const BuiltinFunctionMap function_map;
return SubcontextMain(argc, argv, &function_map);
}
if (!strcmp(argv[1], "selinux_setup")) {
return SetupSelinux(argv);
}
if (!strcmp(argv[1], "second_stage")) {
return SecondStageMain(argc, argv);
}
}
return FirstStageMain(argc, argv);//在这里创建和挂载了启动所需要的目录信息包含tmpfs、devpts、proc、sysfs、selinuxfs文件系统。。
}
2.init.cpp
init.cpp 首先初始化内存空间— 创建Epoll—InstallSignalFdHandler(Epoll)注册Epoll监听—startPropertyService 调用函数把服务拉起来
int SecondStageMain(int argc, char** argv) {
if (REBOOT_BOOTLOADER_ON_PANIC) {
InstallRebootSignalHandlers();
}
SetStdioToDevNull(argv);
InitKernelLogging(argv);
LOG(INFO) << "init second stage started!";
if (auto result = WriteFile("/proc/1/oom_score_adj", "-1000"); !result) {
LOG(ERROR) << "Unable to write -1000 to /proc/1/oom_score_adj: " << result.error();
}
GlobalSeccomp();
keyctl_get_keyring_ID(KEY_SPEC_SESSION_KEYRING, 1);
close(open("/dev/.booting", O_WRONLY | O_CREAT | O_CLOEXEC, 0000));
property_init();//初始化属性服务
process_kernel_dt();
process_kernel_cmdline();
export_kernel_boot_props();
property_set("ro.boottime.init", getenv("INIT_STARTED_AT"));
property_set("ro.boottime.init.selinux", getenv("INIT_SELINUX_TOOK"));
const char* avb_version = getenv("INIT_AVB_VERSION");
if (avb_version) property_set("ro.boot.avb_version", avb_version);
const char* force_debuggable_env = getenv("INIT_FORCE_DEBUGGABLE");
if (force_debuggable_env && AvbHandle::IsDeviceUnlocked()) {
load_debug_prop = "true"s == force_debuggable_env;
}
unsetenv("INIT_STARTED_AT");
unsetenv("INIT_SELINUX_TOOK");
unsetenv("INIT_AVB_VERSION");
unsetenv("INIT_FORCE_DEBUGGABLE");
SelinuxSetupKernelLogging();
SelabelInitialize();
SelinuxRestoreContext();
//创建Epoll
Epoll epoll;
if (auto result = epoll.Open(); !result) {
PLOG(FATAL) << result.error();
}
//创建Handler,监听子进程的信号,如果子进程异常退出,init会调用对应的处理函数来进行处理。
InstallSignalFdHandler(&epoll);
property_load_boot_defaults(load_debug_prop);
UmountDebugRamdisk();
fs_mgr_vendor_overlay_mount_all();
export_oem_lock_status();
//开启属性服务
StartPropertyService(&epoll);
MountHandler mount_handler(&epoll);
set_usb_controller();
const BuiltinFunctionMap function_map;
Action::set_function_map(&function_map);
if (!SetupMountNamespaces()) {
PLOG(FATAL) << "SetupMountNamespaces failed";
}
subcontexts = InitializeSubcontexts();
ActionManager& am = ActionManager::GetInstance();
ServiceList& sm = ServiceList::GetInstance();
//加载配置脚本文件 init.rc
LoadBootScripts(am, sm);
if (false) DumpState();
// Make the GSI status available before scripts start running.
if (android::gsi::IsGsiRunning()) {
property_set("ro.gsid.image_running", "1");
} else {
property_set("ro.gsid.image_running", "0");
}
am.QueueBuiltinAction(SetupCgroupsAction, "SetupCgroups");
am.QueueEventTrigger("early-init");
// Queue an action that waits for coldboot done so we know ueventd has set up all of /dev...
am.QueueBuiltinAction(wait_for_coldboot_done_action, "wait_for_coldboot_done");
// ... so that we can start queuing up actions that require stuff from /dev.
am.QueueBuiltinAction(MixHwrngIntoLinuxRngAction, "MixHwrngIntoLinuxRng");
am.QueueBuiltinAction(SetMmapRndBitsAction, "SetMmapRndBits");
am.QueueBuiltinAction(SetKptrRestrictAction, "SetKptrRestrict");
Keychords keychords;
am.QueueBuiltinAction(
[&epoll, &keychords](const BuiltinArguments& args) -> Result<Success> {
for (const auto& svc : ServiceList::GetInstance()) {
keychords.Register(svc->keycodes());
}
keychords.Start(&epoll, HandleKeychord);
return Success();
},
"KeychordInit");
am.QueueBuiltinAction(console_init_action, "console_init");
// Trigger all the boot actions to get us started.
am.QueueEventTrigger("init");
// Starting the BoringSSL self test, for NIAP certification compliance.
am.QueueBuiltinAction(StartBoringSslSelfTest, "StartBoringSslSelfTest");
// Repeat mix_hwrng_into_linux_rng in case /dev/hw_random or /dev/random
// wasn't ready immediately after wait_for_coldboot_done
am.QueueBuiltinAction(MixHwrngIntoLinuxRngAction, "MixHwrngIntoLinuxRng");
// Initialize binder before bringing up other system services
am.QueueBuiltinAction(InitBinder, "InitBinder");
// Don't mount filesystems or start core system services in charger mode.
std::string bootmode = GetProperty("ro.bootmode", "");
if (bootmode == "charger") {
am.QueueEventTrigger("charger");
} else {
am.QueueEventTrigger("late-init");
}
// Run all property triggers based on current state of the properties.
am.QueueBuiltinAction(queue_property_triggers_action, "queue_property_triggers");
while (true) {
// By default, sleep until something happens.
auto epoll_timeout = std::optional<std::chrono::milliseconds>{};
if (do_shutdown && !shutting_down) {
do_shutdown = false;
if (HandlePowerctlMessage(shutdown_command)) {
shutting_down = true;
}
}
if (!(waiting_for_prop || Service::is_exec_service_running())) {
am.ExecuteOneCommand();
}
if (!(waiting_for_prop || Service::is_exec_service_running())) {
if (!shutting_down) {
auto next_process_action_time = HandleProcessActions();
// If there's a process that needs restarting, wake up in time for that.
if (next_process_action_time) {
epoll_timeout = std::chrono::ceil<std::chrono::milliseconds>(
*next_process_action_time - boot_clock::now());
if (*epoll_timeout < 0ms) epoll_timeout = 0ms;
}
}
// If there's more work to do, wake up again immediately.
if (am.HasMoreCommands()) epoll_timeout = 0ms;
}
if (auto result = epoll.Wait(epoll_timeout); !result) {
LOG(ERROR) << result.error();
}
}
return 0;
}
3.property_service.cpp
创建Android的注册表,将一些用户、应用的信息存储下来 系统会根据这些属性进行初始化工作。创建了property的socket 并且将socket注册到Epoll中,在handle_property_set_fd中将属性添加到内存空间中去。
void StartPropertyService(Epoll* epoll) {
selinux_callback cb;
cb.func_audit = SelinuxAuditCallback;
//设置selinux的callback
selinux_set_callback(SELINUX_CB_AUDIT, cb);
property_set("ro.property_service.version", "2");
//创建属性的非阻塞式socket
property_set_fd = CreateSocket(PROP_SERVICE_NAME, SOCK_STREAM | SOCK_CLOEXEC | SOCK_NONBLOCK,
false, 0666, 0, 0, nullptr);
if (property_set_fd == -1) {
PLOG(FATAL) << "start_property_service socket creation failed";
}
//listen对property_set_fd进行监听,最多可以同时为8个链接提供服务。
listen(property_set_fd, 8);
//epoll 注册Handler,监听property_set_fd,当有更新的时候会调用handle_property_set_fd来进行处理。
if (auto result = epoll->RegisterHandler(property_set_fd, handle_property_set_fd); !result) {
PLOG(FATAL) << result.error();
}
}
//属性事件处理器
static void handle_property_set_fd() {
static constexpr uint32_t kDefaultSocketTimeout = 2000; /* ms */ //设置超时时长
int s = accept4(property_set_fd, nullptr, nullptr, SOCK_CLOEXEC);
if (s == -1) {
return;
}
ucred cr;
socklen_t cr_size = sizeof(cr);
if (getsockopt(s, SOL_SOCKET, SO_PEERCRED, &cr, &cr_size) < 0) {
close(s);
PLOG(ERROR) << "sys_prop: unable to get SO_PEERCRED";
return;
}
SocketConnection socket(s, cr);
uint32_t timeout_ms = kDefaultSocketTimeout;
uint32_t cmd = 0;
if (!socket.RecvUint32(&cmd, &timeout_ms)) {//接收数据
PLOG(ERROR) << "sys_prop: error while reading command from the socket";
socket.SendUint32(PROP_ERROR_READ_CMD);
return;
}
switch (cmd) {
case PROP_MSG_SETPROP: {//设置属性事件
char prop_name[PROP_NAME_MAX];
char prop_value[PROP_VALUE_MAX];
//从socket中读取name 和 value
if (!socket.RecvChars(prop_name, PROP_NAME_MAX, &timeout_ms) ||
!socket.RecvChars(prop_value, PROP_VALUE_MAX, &timeout_ms)) {
PLOG(ERROR) << "sys_prop(PROP_MSG_SETPROP): error while reading name/value from the socket";
return;
}
prop_name[PROP_NAME_MAX-1] = 0;
prop_value[PROP_VALUE_MAX-1] = 0;
const auto& cr = socket.cred();
std::string error;
uint32_t result =
HandlePropertySet(prop_name, prop_value, socket.source_context(), cr, &error);//设置属性
if (result != PROP_SUCCESS) {
LOG(ERROR) << "Unable to set property '" << prop_name << "' to '" << prop_value
<< "' from uid:" << cr.uid << " gid:" << cr.gid << " pid:" << cr.pid << ": "
<< error;
}
break;
}
case PROP_MSG_SETPROP2: {//同上
std::string name;
std::string value;
if (!socket.RecvString(&name, &timeout_ms) ||
!socket.RecvString(&value, &timeout_ms)) {
PLOG(ERROR) << "sys_prop(PROP_MSG_SETPROP2): error while reading name/value from the socket";
socket.SendUint32(PROP_ERROR_READ_DATA);
return;
}
const auto& cr = socket.cred();
std::string error;
uint32_t result = HandlePropertySet(name, value, socket.source_context(), cr, &error);
if (result != PROP_SUCCESS) {
LOG(ERROR) << "Unable to set property '" << name << "' to '" << value
<< "' from uid:" << cr.uid << " gid:" << cr.gid << " pid:" << cr.pid << ": "
<< error;
}
socket.SendUint32(result);
break;
}
default:
LOG(ERROR) << "sys_prop: invalid command " << cmd;
socket.SendUint32(PROP_ERROR_INVALID_CMD);
break;
}
}
//设置属性
uint32_t HandlePropertySet(const std::string& name, const std::string& value,
const std::string& source_context, const ucred& cr, std::string* error) {
if (auto ret = CheckPermissions(name, value, source_context, cr, error); ret != PROP_SUCCESS) {
return ret;
}
if (StartsWith(name, "ctl.")) {//控制属性的处理
HandleControlMessage(name.c_str() + 4, value, cr.pid);
return PROP_SUCCESS;
}
// sys.powerctl is a special property that is used to make the device reboot. We want to log
// any process that sets this property to be able to accurately blame the cause of a shutdown.
if (name == "sys.powerctl") {//记录重启设备原因的属性
std::string cmdline_path = StringPrintf("proc/%d/cmdline", cr.pid);
std::string process_cmdline;
std::string process_log_string;
if (ReadFileToString(cmdline_path, &process_cmdline)) {
// Since cmdline is null deliminated, .c_str() conveniently gives us just the process
// path.
process_log_string = StringPrintf(" (%s)", process_cmdline.c_str());
}
LOG(INFO) << "Received sys.powerctl='" << value << "' from pid: " << cr.pid
<< process_log_string;
}
if (name == "selinux.restorecon_recursive") {
return PropertySetAsync(name, value, RestoreconRecursiveAsync, error);
}
//设置普通属性
return PropertySet(name, value, error);
}
我们只看普通属性,因为控制属性需要客户端的权限。
static uint32_t PropertySet(const std::string& name, const std::string& value, std::string* error) {
size_t valuelen = value.size();
if (!IsLegalPropertyName(name)) {
*error = "Illegal property name";
return PROP_ERROR_INVALID_NAME;
}
if (valuelen >= PROP_VALUE_MAX && !StartsWith(name, "ro.")) {
*error = "Property value too long";
return PROP_ERROR_INVALID_VALUE;
}
if (mbstowcs(nullptr, value.data(), 0) == static_cast<std::size_t>(-1)) {
*error = "Value is not a UTF8 encoded string";
return PROP_ERROR_INVALID_VALUE;
}
//从属性内存空间查找,属性存在就更新属性值,否则创建并且添加进去。
prop_info* pi = (prop_info*) __system_property_find(name.c_str());
if (pi != nullptr) {
// ro.* properties are actually "write-once".
if (StartsWith(name, "ro.")) {
*error = "Read-only property was already set";
return PROP_ERROR_READ_ONLY_PROPERTY;
}
__system_property_update(pi, value.c_str(), valuelen);
} else {
int rc = __system_property_add(name.c_str(), name.size(), value.c_str(), valuelen);
if (rc < 0) {
*error = "__system_property_add failed";
return PROP_ERROR_SET_FAILED;
}
}
if (persistent_properties_loaded && StartsWith(name, "persist.")) {
WritePersistentProperty(name, value);
}
property_changed(name, value);
return PROP_SUCCESS;
}
4,LoadBootScripts
加载并解析init.rc 根据rc文件创建Service对象,最终将service添加到service_List中,然后解析执行 class_start的时候会开启服务调用Service::Start函数,fork子进程,并且执行app_process文件 开启了zygote,也就到了zygote的main函数中了。
static void LoadBootScripts(ActionManager& action_manager, ServiceList& service_list) {
Parser parser = CreateParser(action_manager, service_list);//创建解析器
std::string bootscript = GetProperty("ro.boot.init_rc", "");//根据ro.boot.init_rc的属性值来获取需要执行的脚本
if (bootscript.empty()) {
parser.ParseConfig("/init.rc");
if (!parser.ParseConfig("/system/etc/init")) {
late_import_paths.emplace_back("/system/etc/init");
}
if (!parser.ParseConfig("/product/etc/init")) {
late_import_paths.emplace_back("/product/etc/init");
}
if (!parser.ParseConfig("/product_services/etc/init")) {
late_import_paths.emplace_back("/product_services/etc/init");
}
if (!parser.ParseConfig("/odm/etc/init")) {
late_import_paths.emplace_back("/odm/etc/init");
}
if (!parser.ParseConfig("/vendor/etc/init")) {
late_import_paths.emplace_back("/vendor/etc/init");
}
} else {
parser.ParseConfig(bootscript);
}
}
//1.根据action on 和import类型的不同创建不同的解析器
Parser CreateParser(ActionManager& action_manager, ServiceList& service_list) {
Parser parser;
parser.AddSectionParser("service", std::make_unique<ServiceParser>(
&service_list, GetSubcontext(), std::nullopt));
parser.AddSectionParser("on", std::make_unique<ActionParser>(&action_manager, GetSubcontext()));
parser.AddSectionParser("import", std::make_unique<ImportParser>(&parser));
return parser;
}
/*2.读取init.rc文件 在init.rc中根据系统导入对应的zygote.rc 在init进程中创建Zygote进程,该进程的可执行文件在/system/bin/app_process 并且传入参数 -Xzygote /system/bin --zygote --start-system-server 指定classname=main */
service zygote /system/bin/app_process -Xzygote /system/bin --zygote --start-system-server
class main
priority -20
user root
group root readproc reserved_disk
socket zygote stream 660 root system
socket usap_pool_primary stream 660 root system
onrestart write /sys/android_power/request_state wake
onrestart write /sys/power/state on
onrestart restart audioserver
onrestart restart cameraserver
onrestart restart media
onrestart restart netd
onrestart restart wificond
writepid /dev/cpuset/foreground/tasks
3.解析器根据文件的格式来执行对应的动作。
文件目录:system/core/init/service.cpp
在线地址:https://cs.android.com/android/platform/superproject/+/android10-release:system/core/init/service.cpp
//开始解析
Result<Success> ServiceParser::ParseSection(std::vector<std::string>&& args,
const std::string& filename, int line) {
if (args.size() < 3) {//判断可执行参数 我们传递的参数大于3个的 所以不会到这里来。
return Error() << "services must have a name and a program";
}
const std::string& name = args[1];
if (!IsValidName(name)) {//校验Name
return Error() << "invalid service name '" << name << "'";
}
filename_ = filename;
Subcontext* restart_action_subcontext = nullptr;
if (subcontexts_) {
for (auto& subcontext : *subcontexts_) {
if (StartsWith(filename, subcontext.path_prefix())) {
restart_action_subcontext = &subcontext;
break;
}
}
}
std::vector<std::string> str_args(args.begin() + 2, args.end());
if (SelinuxGetVendorAndroidVersion() <= __ANDROID_API_P__) {
if (str_args[0] == "/sbin/watchdogd") {
str_args[0] = "/system/bin/watchdogd";
}
}
//创建service对象
service_ = std::make_unique<Service>(name, restart_action_subcontext, str_args);
return Success();
}
//解析完成
Result<Success> ServiceParser::EndSection() {
if (service_) {//如果service存在就将原来的service删除 再添加新的
Service* old_service = service_list_->FindService(service_->name());
if (old_service) {
if (!service_->is_override()) {
return Error() << "ignored duplicate definition of service '" << service_->name()
<< "'";
}
if (StartsWith(filename_, "/apex/") && !old_service->is_updatable()) {
return Error() << "cannot update a non-updatable service '" << service_->name()
<< "' with a config in APEX";
}
service_list_->RemoveService(*old_service);
old_service = nullptr;
}
//调用service_list->addService函数进行添加
service_list_->AddService(std::move(service_));
}
return Success();
}
解析完成后需要启动 在init.rc中我们找到对应的启动 之前说到的class = main 而class_start是一个command
on nonencrypted
class_start main
class_start late_start
文件目录: /android/system/core/init
static Result<Success> do_class_start(const BuiltinArguments& args) {
// Do not start a class if it has a property persist.dont_start_class.CLASS set to 1.
if (android::base::GetBoolProperty("persist.init.dont_start_class." + args[1], false))
return Success();
// Starting a class does not start services which are explicitly disabled.
// They must be started individually.
for (const auto& service : ServiceList::GetInstance()) {//遍历serviceList
if (service->classnames().count(args[1])) {
if (auto result = service->StartIfNotDisabled(); !result) {//执行startIfNotDisable函数
LOG(ERROR) << "Could not start service '" << service->name()
<< "' as part of class '" << args[1] << "': " << result.error();
}
}
}
return Success();
}
文件目录:/system/core/init/service.cpp
Result<Success> Service::StartIfNotDisabled() {
if (!(flags_ & SVC_DISABLED)) { //判断有没有在init.rc中配置disabled
return Start();//开启Zygote
} else {
flags_ |= SVC_DISABLED_START;
}
return Success();
}
//调用start 开启zygote服务
Result<Success> Service::Start() {
if (is_updatable() && !ServiceList::GetInstance().IsServicesUpdated()) {
ServiceList::GetInstance().DelayService(*this);
return Error() << "Cannot start an updatable service '" << name_
<< "' before configs from APEXes are all loaded. "
<< "Queued for execution.";
}
bool disabled = (flags_ & (SVC_DISABLED | SVC_RESET));
flags_ &= (~(SVC_DISABLED|SVC_RESTARTING|SVC_RESET|SVC_RESTART|SVC_DISABLED_START));
if (flags_ & SVC_RUNNING) {//如果服务已经开启 就return Success
if ((flags_ & SVC_ONESHOT) && disabled) {
flags_ |= SVC_RESTART;
}
// It is not an error to try to start a service that is already running.
return Success();
}
bool needs_console = (flags_ & SVC_CONSOLE);
if (needs_console) {
if (console_.empty()) {
console_ = default_console;
}
int console_fd = open(console_.c_str(), O_RDWR | O_CLOEXEC);
if (console_fd < 0) {
flags_ |= SVC_DISABLED;
return ErrnoError() << "Couldn't open console '" << console_ << "'";
}
close(console_fd);
}
struct stat sb;
//判断对应的执行文件是否存在也就算zygote.rc中的/system/bin/app_process。手机中的/system/bin/app_process文件。
if (stat(args_[0].c_str(), &sb) == -1) {
flags_ |= SVC_DISABLED;
return ErrnoError() << "Cannot find '" << args_[0] << "'";
}
std::string scon;
if (!seclabel_.empty()) {
scon = seclabel_;
} else {
auto result = ComputeContextFromExecutable(args_[0]);
if (!result) {
return result.error();
}
scon = *result;
}
if (!IsRuntimeApexReady() && !pre_apexd_) {
pre_apexd_ = true;
}
post_data_ = ServiceList::GetInstance().IsPostData();
LOG(INFO) << "starting service '" << name_ << "'...";
//判断进程是否启动,没有启动就fork子进程。所以zygote是init的子进程。
pid_t pid = -1;
if (namespace_flags_) {
pid = clone(nullptr, nullptr, namespace_flags_ | SIGCHLD, nullptr);
} else {
pid = fork();
}
if (pid == 0) {//子进程(zygote)中执行的函数
umask(077);
if (auto result = EnterNamespaces(); !result) {
LOG(FATAL) << "Service '" << name_ << "' could not enter namespaces: " << result.error();
}
if (namespace_flags_ & CLONE_NEWNS) {
if (auto result = SetUpMountNamespace(); !result) {
LOG(FATAL) << "Service '" << name_
<< "' could not set up mount namespace: " << result.error();
}
}
if (namespace_flags_ & CLONE_NEWPID) {
if (auto result = SetUpPidNamespace(); !result) {
LOG(FATAL) << "Service '" << name_
<< "' could not set up PID namespace: " << result.error();
}
}
for (const auto& [key, value] : environment_vars_) {
setenv(key.c_str(), value.c_str(), 1);
}
std::for_each(descriptors_.begin(), descriptors_.end(),
std::bind(&DescriptorInfo::CreateAndPublish, std::placeholders::_1, scon));
std::string cpuset_path;
if (CgroupGetControllerPath("cpuset", &cpuset_path)) {
auto cpuset_predicate = [&cpuset_path](const std::string& path) {
return StartsWith(path, cpuset_path + "/");
};
auto iter =
std::find_if(writepid_files_.begin(), writepid_files_.end(), cpuset_predicate);
if (iter == writepid_files_.end()) {
std::string default_cpuset = GetProperty("ro.cpuset.default", "");
if (!default_cpuset.empty()) {
if (default_cpuset.front() != '/') {
default_cpuset.insert(0, 1, '/');
}
if (default_cpuset.back() != '/') {
default_cpuset.push_back('/');
}
writepid_files_.push_back(
StringPrintf("%s%stasks", cpuset_path.c_str(), default_cpuset.c_str()));
}
}
} else {
LOG(ERROR) << "cpuset cgroup controller is not mounted!";
}
std::string pid_str = std::to_string(getpid());
for (const auto& file : writepid_files_) {
if (!WriteStringToFile(pid_str, file)) {
PLOG(ERROR) << "couldn't write " << pid_str << " to " << file;
}
}
if (ioprio_class_ != IoSchedClass_NONE) {
if (android_set_ioprio(getpid(), ioprio_class_, ioprio_pri_)) {
PLOG(ERROR) << "failed to set pid " << getpid()
<< " ioprio=" << ioprio_class_ << "," << ioprio_pri_;
}
}
if (needs_console) {
setsid();
OpenConsole();
} else {
ZapStdio();
}
SetProcessAttributes();
//调用execv函数,启动service子进程
if (!ExpandArgsAndExecv(args_, sigstop_)) {
PLOG(ERROR) << "cannot execve('" << args_[0] << "')";
}
_exit(127);
}
if (pid < 0) {
pid_ = 0;
return ErrnoError() << "Failed to fork";
}
if (oom_score_adjust_ != -1000) {
std::string oom_str = std::to_string(oom_score_adjust_);
std::string oom_file = StringPrintf("/proc/%d/oom_score_adj", pid);
if (!WriteStringToFile(oom_str, oom_file)) {
PLOG(ERROR) << "couldn't write oom_score_adj";
}
}
time_started_ = boot_clock::now();
pid_ = pid;
flags_ |= SVC_RUNNING;
start_order_ = next_start_order_++;
process_cgroup_empty_ = false;
bool use_memcg = swappiness_ != -1 || soft_limit_in_bytes_ != -1 || limit_in_bytes_ != -1 ||
limit_percent_ != -1 || !limit_property_.empty();
errno = -createProcessGroup(uid_, pid_, use_memcg);
if (errno != 0) {
PLOG(ERROR) << "createProcessGroup(" << uid_ << ", " << pid_ << ") failed for service '"
<< name_ << "'";
} else if (use_memcg) {
if (swappiness_ != -1) {
if (!setProcessGroupSwappiness(uid_, pid_, swappiness_)) {
PLOG(ERROR) << "setProcessGroupSwappiness failed";
}
}
if (soft_limit_in_bytes_ != -1) {
if (!setProcessGroupSoftLimit(uid_, pid_, soft_limit_in_bytes_)) {
PLOG(ERROR) << "setProcessGroupSoftLimit failed";
}
}
size_t computed_limit_in_bytes = limit_in_bytes_;
if (limit_percent_ != -1) {
long page_size = sysconf(_SC_PAGESIZE);
long num_pages = sysconf(_SC_PHYS_PAGES);
if (page_size > 0 && num_pages > 0) {
size_t max_mem = SIZE_MAX;
if (size_t(num_pages) < SIZE_MAX / size_t(page_size)) {
max_mem = size_t(num_pages) * size_t(page_size);
}
computed_limit_in_bytes =
std::min(computed_limit_in_bytes, max_mem / 100 * limit_percent_);
}
}
if (!limit_property_.empty()) {
computed_limit_in_bytes = android::base::GetUintProperty(
limit_property_, computed_limit_in_bytes, SIZE_MAX);
}
if (computed_limit_in_bytes != size_t(-1)) {
if (!setProcessGroupLimit(uid_, pid_, computed_limit_in_bytes)) {
PLOG(ERROR) << "setProcessGroupLimit failed";
}
}
}
NotifyStateChange("running");
return Success();
}
static bool ExpandArgsAndExecv(const std::vector<std::string>& args, bool sigstop) {
std::vector<std::string> expanded_args;
std::vector<char*> c_strings;
expanded_args.resize(args.size());
c_strings.push_back(const_cast<char*>(args[0].data()));
for (std::size_t i = 1; i < args.size(); ++i) {
if (!expand_props(args[i], &expanded_args[i])) {
LOG(FATAL) << args[0] << ": cannot expand '" << args[i] << "'";
}
c_strings.push_back(expanded_args[i].data());
}
c_strings.push_back(nullptr);
if (sigstop) {
kill(getpid(), SIGSTOP);
}
//执行app_process 也就是调用app_main.cpp的main函数 这样就进入到zygote了。
return execv(c_strings[0], c_strings.data()) == 0;
}
拓展知识
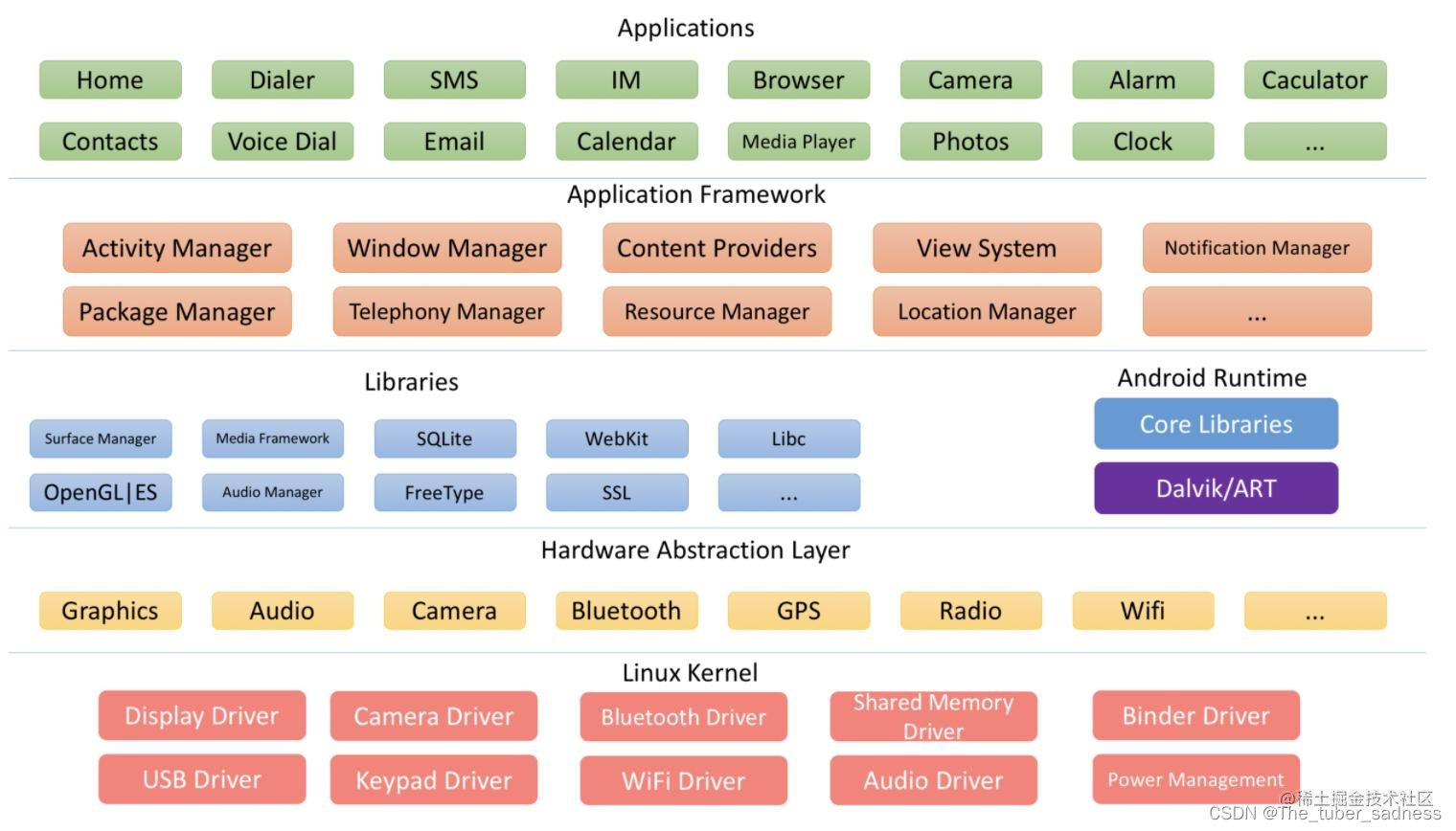
Android的架构图
// 从上到下依次(这是知识体系建立的第一步)
Applications //应用层开发
Application Framework //Framework开发
Libraries / Android Runtime
HAL
Linux
I/O多路复用
Select–>poll—>epoll 区别
Select -->数组 大小限制1024. 性能
Poll -->链表 没有大小限制 性能 系统上下文切换
Epoll–>红黑树 O(1)基于事件 fd 写操作唤起对应读操作端
总结
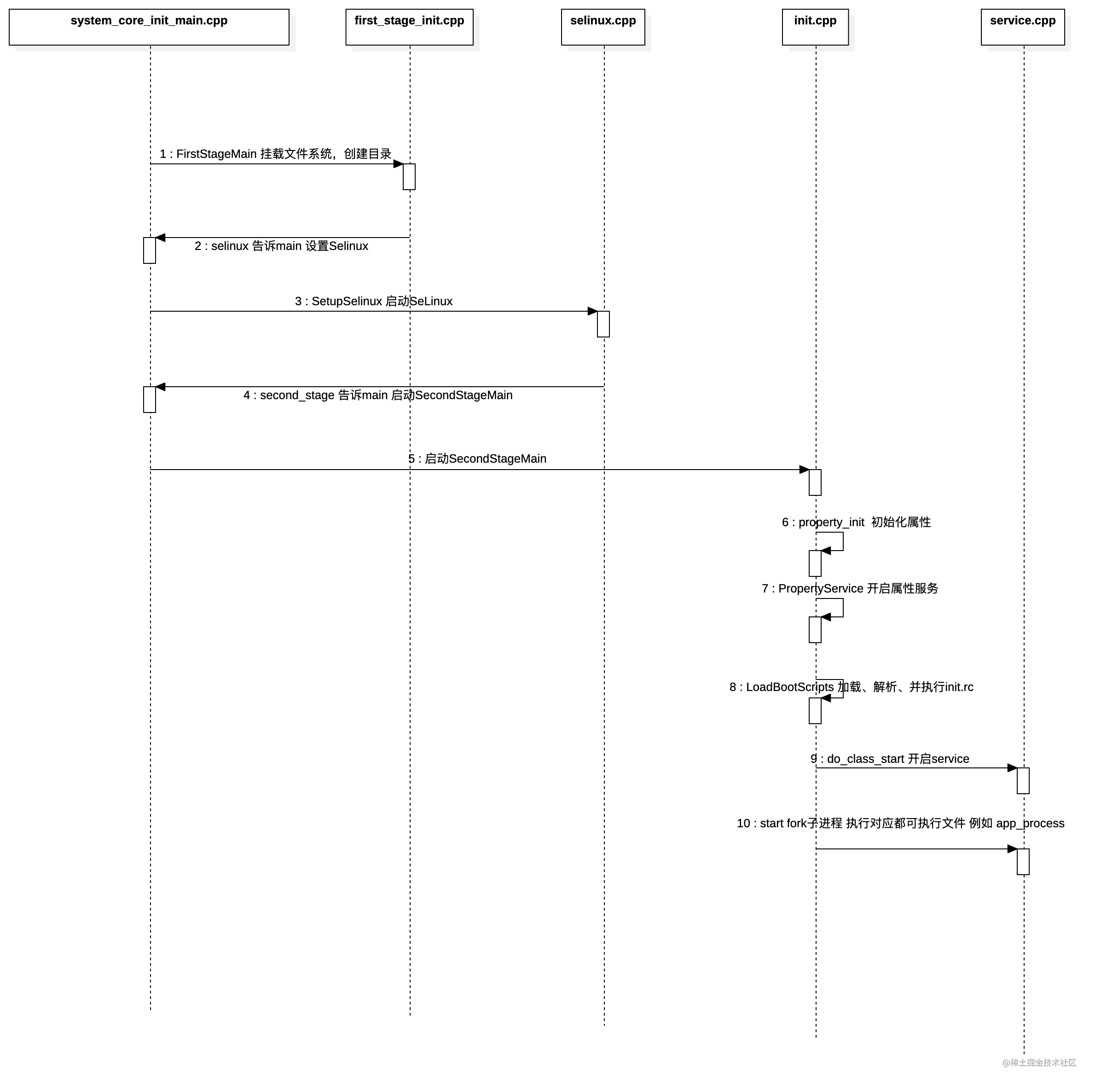
Framework 的第一个启动程序init主要流程如下:
1,FirstStageMain() 挂载文件系统以及创建目录 调用selinux_setup安全权限相关
2,上下文审查
3,初始化内存空间 property_init 初始化属性服务 创建Epoll 注册监听Epoll 子进程的一些情况 (重启异常操作等,对子进程进行线程守护)
4,startPropertyServic 开启属性服务 进行监听
5,LoadBootScripts 加载init.rc文件 进行解析 调用do_class_start 文件开启service
6,init.rc文件(多种子进程) . Service::Start函数->fork子进程->并且执行app_process文件
开启了zygote zygote是init的子进程
流程图:







![[算法前沿]--003-AGI通用人工智能模型对安全的影响和开源的大模型](https://img-blog.csdnimg.cn/img_convert/7052564ffa27409faea43ae7e5a1ca55.jpeg)