今天给大家带来的是电动汽车路径规划问题(Electric Vehicle-Routing Problem, EVRP)的介绍,按照惯例先上目录,其中第三部分的主要内容出自文献“The Electric Vehicle-Routing Problem with Time Windows and Recharging Stations”。
目录
问题简介
VRP与EVRP
E-VRPTW
参考文献
1
问题简介
我们古代的时候有没有类似物流一样的东西呢?我想古代总有到处跑运送物资或者信件的吧,不是还有镖局呢嘛,当然肯定跟我们现在研究的物流有很多不一样的地方。古代运输基本靠动物作为交通工具,到了近代开始有各种机械,比如小时候送信的邮差大多骑的是自行车,现在的物流配送比较多的是用汽车(这里不讨论长距离的)。
我们可以发现业务需求都大同小异,但是运输工具不断变化。我们说的车辆路径规划问题,同样的需求放古代可能就是马匹路径规划问题,虽然作用是一样的,但是由于不同的工具会有不同的特点从而会影响路径的规划。就算都是汽车,大一点小一点也可能会造成路线规划的不同。既然以前的运输交通工具在变化,那么现在的运输交通工具应该也会不断变化。现在是汽车、电动车,以后可能还有会飞的,可能走出地球了要考虑星系中的路径规划了,你看三体里水滴要摧毁人类的舰队不也得解一下路径问题么。
扯远了扯远了,那么今天要说的呢就是用电动汽车作为运输工具的时候的路径规划,也就是电动汽车路径规划(Electric Vehicle Routing Problem, EVRP)。
电动汽车最近几年的发展是比较迅速的,世界上也有很多地方推广用电动的替代燃烧化石燃料的。至于原因,大家可以想到减少尾气的排放让空气质量更好。欧盟在2010年的统计显示交通运输活动排放的温室气体占比将近20%,其中大部分在道路运输的过程中产生。此外还有噪音污染也是存在的,在一些接近高速路的民居附近会安装相应的减少噪音的装置,电动汽车的发动机和传统汽车的发动机不一样,电动汽车的产生的噪声要少得多,而且电动汽车使用的能源是可再生的。
2
VRP与EVRP
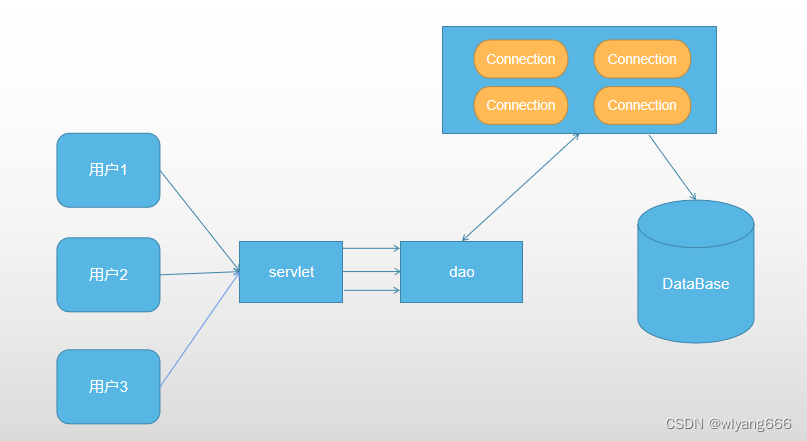
既然电动汽车有这么多好处,为啥企业不用呢?当然是因为····贵啊。但是就算现在电动汽车大减价,价格跟燃油汽车差不多,那配送车队会进行更换吗?目前还不一定噢。因为电动汽车要大规模应用还是有些问题要解决的。电动汽车是充电用的,手机也是充电用的,大家出门一天不带充电宝不带充电线,电量很低的时候是不是会很慌?其实开电动车也有这样的顾虑,叫里程焦虑(Range Anxiety),也就是因担心突然没电引起的精神痛苦或者忧虑(Tredeau and Salameh 2009; Botsford and Szczepanek 2009)。
那燃油汽车就没有这样的焦虑吗?几乎没有,因为加油站到处都有,相当于到处都有你这个手机插座和充电线,而且充电还贼快。即使未来充电站铺设好了,充电速度可能也无法和加油媲美,这样一来配送过程就要多花一些时间在这上面了。此外电池容量低也会导致车辆一次充电的行驶里程相较于燃油的短,而且电池电量还会受环境温度的影响。
充电和电池使得EVRP相较于传统的VRP需要考虑更多东西,在里程比较短,充电站还不够多的情况下,选择在哪个充电站进行充电就需要算法进行选择了,要在电量、里程焦虑、绕路去充电之间作权衡。例如下面这个途中,从顾客2到顾客3的路线可以是去充电然后出发去顾客3。不担心电量的话可以直接出发去顾客3。如果是电量不足以先去服务顾客3再回场站但是又足够回场站的话,就要权衡是不是直接回场站再派另一辆车服务顾客3还是先去充电再接着服务,

还有一个问题是电动汽车充电并不是像汽车加油那样基本是一个线性的过程,汽油在整个加油过程中流速不会有太大的变化。但是电动汽车的电池在充电和放电的效率上并不是线性的,例如在重新充电的时候最后的10%-20%花的时间要比之前的多(Marra et al. 2012)。
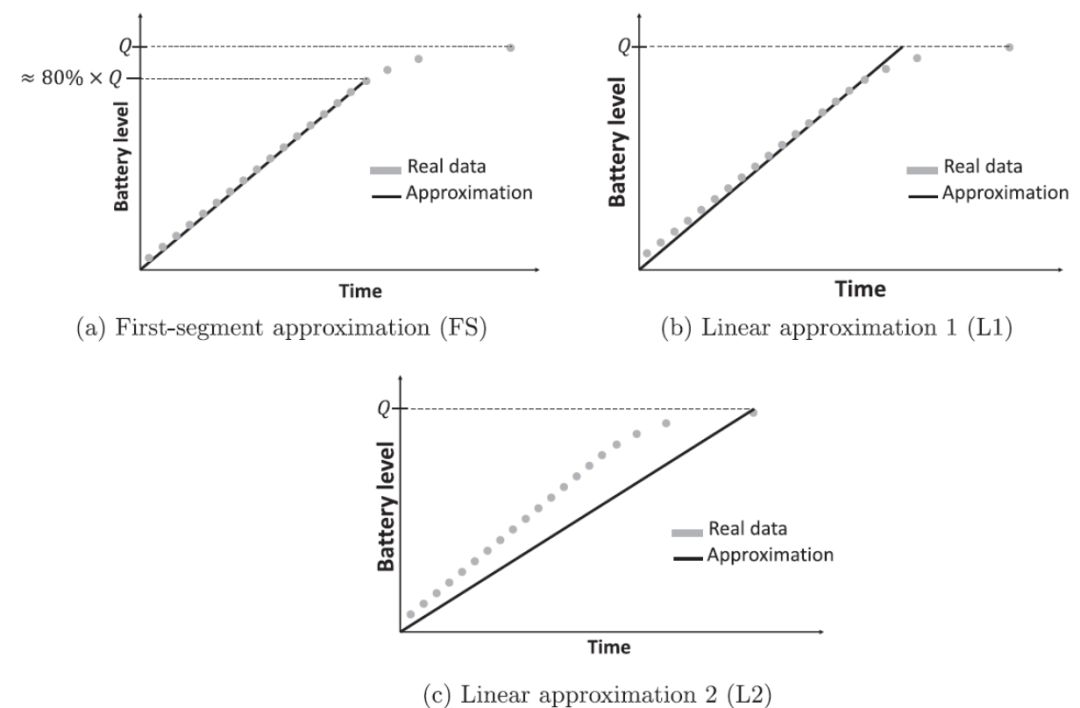
由于充电的时间比加油的时间长的多使得充电时间不能被忽视,因此会用一个充电函数来描述这一过程,简化版本的呢会用线性函数来构建,也有研究非线性的充电函数的。但是在实际应用中这两者的差别还是挺大的,使用简化后的线性函数构建充电函数在实际应用中可能会有较大的误差。如下图选取不同的数据作线性函数的拟合,会有相差较大的结果,在实际应用中是需要避免出现这样的问题的。
在现实世界中电量的消耗速度还和载荷、车速、坡度甚至风速等等因素相关。
3
E-VRPTW
在小包裹运输行业,一些大公司,如DHL、UPS和DPD已经开始使用电动汽车进行“最后一公里”的配送,特别是在城市地区。在现阶段而言,路径规划还是能为这些使用电动汽车的企业做些事情的。
今天我们要介绍的是带时间窗约束的车辆的电动汽车路径规划问题,因为时间窗约束在这最后一公里的配送中是比较常见的约束。
文章里使用的算法是变邻域搜索算法和禁忌搜索算法的混合算法。变邻域搜索算法我们曾经仔细地介绍过,这里就不过多的介绍了,补课链接"干货 | 变邻域搜索算法(Variable Neighborhood Search,VNS)超详细一看就懂"。这里的混合变邻域搜索算法跟一般的变邻域搜索算法的shaking阶段是相同的,但是在领域搜索上这里的混合算法使用的是禁忌搜索算法,此外在解的接受上也借鉴了模拟退火算法的思想,也就是说在邻域中搜索得到的解比现有的解差时,算法会以一定的几率接受这个解,如果比现有的解更优的话是一定会接受的。后面会介绍一下一些环节用到的方法。
3.1 数学模型
问题定义就不说了吧,带时间窗约束的车辆路径规划我们也做过很多推文了,这里在定义上把汽车限定在了电动汽车。定义上没有特别大的不同,差异主要体现在我们上文中所介绍的充电环节上。
这个模型的充电函数是线性的,以一个稳定的速率充电。具体的定义小编就假设各位读者人均英语四级以上能够看懂啦(因为公众号整公式符号是真滴难受)

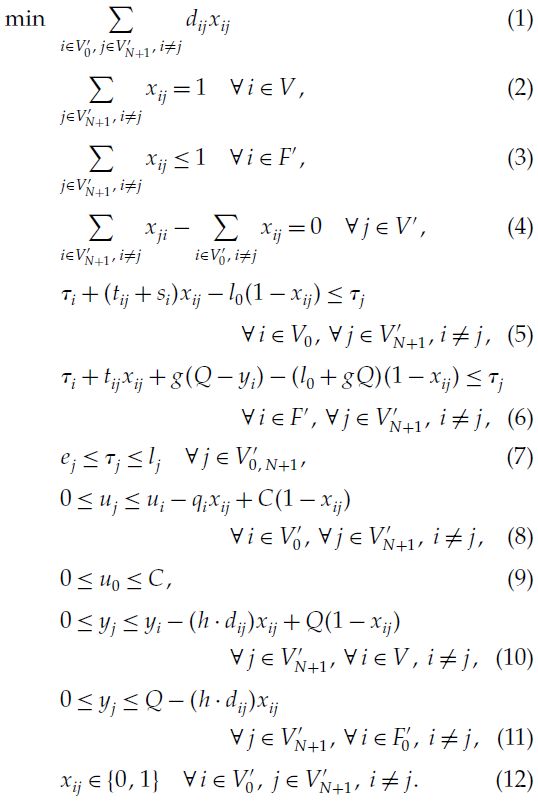
其中优化目标是使得行驶距离最短,约束(2)、约束(3)保证访问的顾客节点和充电站节点是连通的;约束(4)则是保证节点的流守恒,即入的流和出的流要相等;约束(5)、约束(6)保证离开节点在时间上的可行性;约束(7)满足时间窗约束;此外约束(5)~约束(7)也能够防止子回路的出现;约束(8)和约束(9)保证顾客的需求得到满足;约束(10)和约束(11)保证汽车电量不会在0以下。在解问题的算法上由于这个问题是NP-Hard问题,因此算法上还是跟我们之前所介绍的差不多,小规模的精确性算法和启发式算法,文献里用的方法是变邻域搜索和禁忌搜索的混合算法。
3.2 初始解的构造
在进行初始解的构造之前,可以根据一些条件去掉图中一些明显不可行的边,这样可以减少搜索域。满足以下约束的边都是不可行的:
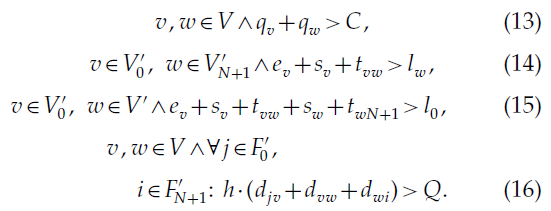
不可行的原因是因为满足约束(13)的边是超过容量约束的边,满足约束(14)和约束(15)的边是不满足时间窗约束的边,而满足约束(16)的边则是违反电池的容量约束的边。
去掉上面这些边后随机选择一个顾客点,该点与场站可以确定一条射线,其余的点也可以与场站确定一条射线,这些射线与第一条射线会形成一个夹角。按照夹角角度的大小将顾客顾客节点做一个排序。根据这些排序将顾客一个一个地指派给一辆车辆的行驶路线,并且安排在增加的行驶距离最小的位置上。如果当前的路线已经超过载货容量或者电池容量的限制了则开启新的行驶线路,直到所有的顾客都被安排上。
3.3 目标函数
文章中的优化目标是使得行驶距离最短。变邻域搜索和禁忌搜索很多时候都会允许非可行解的存在以扩大搜索空间,但是在优化的目标函数上会对违反约束的解增加惩罚项。VRPTW问题会惩罚违反容量约束和时间窗约束的解,使用电动汽车的时候,除了上述这两个约束以外还会惩罚违反电池容量约束的解。
至于约束违反如何计算相信就不用过多介绍了,因为容量通过加减就可以计算出来。时间窗和电量都可以通过计算到达每个节点时的时间和剩余电量进行计算。
3.4 变邻域搜索部分
这里的shaking阶段跟一般的VNS相同,局部搜索会用后面介绍的禁忌搜索部分替代。领域结构由循环交换算子定义。举个例子,如果有三条线路参与循环交换,那么循环交换是这样的
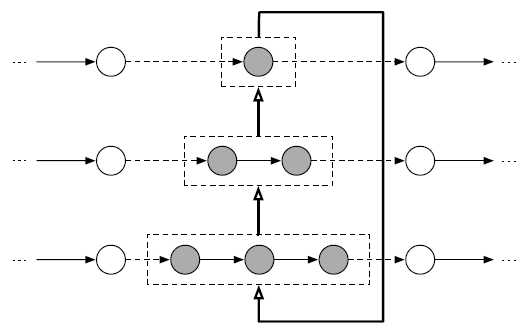
文中用到的邻域结构如下:
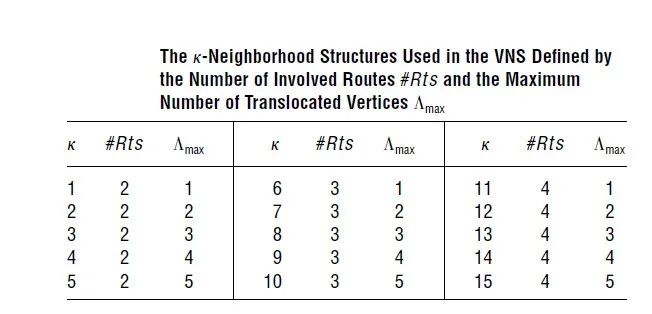
每一个小表格中的第二列是参与上述算子的路线的数量,第三列是一条路线中允许移动的连续节点的最大数量。实际移动的数量会取路线上的节点数量和这个最大数量中的最小值。
3.5 禁忌搜索部分
这里的禁忌搜索替代一般的VNS中的局部搜索,可以看作是一种改进吧。这里用到的搜索算子有2-opt*、exchange、relocate和根据问题提出的stationInRe。
这个2-opt*可能说的并不多,我们之前的推文有介绍过2-opt算法,算法的操作像下面这样
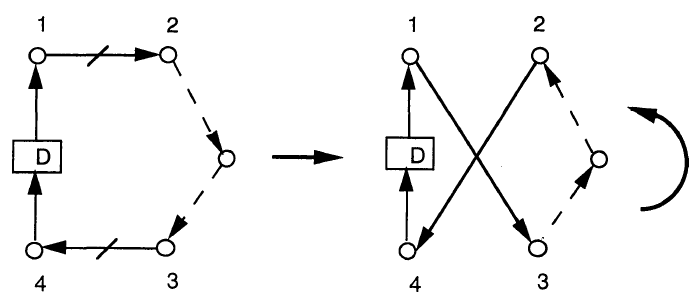
但是这个算法在有时间窗约束的情况下并不是特别适用,因为这个算法会反转一部分顾客节点的访问顺序,破坏解的可行性的可能性会变大。2-opt*正是为了尽可能避免这种破坏提出来的,即同样是交换一对边,但是保留访问顺序。举个例子,在图上的一条路线是一个环,2-opt*算法就是在两个环上交换一对边,并且保持剩下的节点的访问的先后顺序。如下图

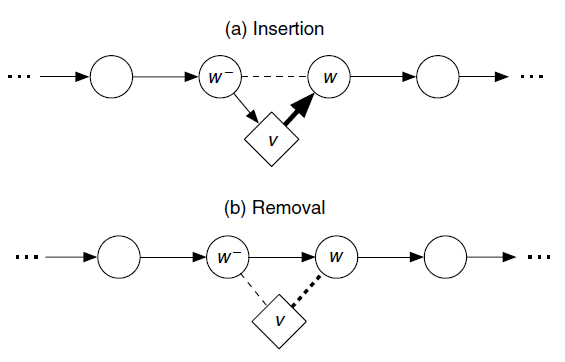
这里要介绍一下文里提出的stationInRe。这里的station是指充电站,In指的是insertion, Re指的是removal。这个算子针对的是所有与充电站相连的边,即边(v,w),其中点v为充电站,令w-为点w的上一个顾客节点。如果(v,w)不是解的一部分,那么就将这个边插入到(w-,w)之间。反之则将(v,w)移除掉。
至于禁忌规则跟我们以往介绍的差不多,被移除的边在接下来的特定次数的迭代中不能重新插入到一些地方。特赦原则与一般的禁忌搜索相同,接受处于禁忌状态但是比当前最优解更优的可行解。
导语: 在过去的十年中,越来越多的学者考虑将电动汽车(EVs)加入到车辆路径问题(VRPs)的模型和方法中。本文对关于电动汽车的车辆路径问题及其变种问题进行了全面探究。我们考虑车辆在行驶过程中访问多个点并进行充电的问题。通过查阅大量文献,相关问题大致可分为9类:电动旅行商问题、绿色VRP、电动VRP、混合电动VRP、电动选址路径问题、杂交电动VRP、电动dial-a-ride 问题、电动二级VRP及电动同时取送货问题。对于每一类问题,我们将重点对变体问题以及相关求解算法进行综述。
1 引言
燃烧化石燃料会产生温室气体(GHG),这不但会引起气候变化和全球变暖,还会导致空气污染并损害人类健康(Schiffer and Walther, 2017)。交通运输在经济发展中起着重要的作用,却需要消耗大量的化石燃料。根据美国环境保护署2018年的报告,2016年,运输业的温室气体排放量占美国总量的28.5%。根据欧盟统计局的数据,2017年,交通运输的燃料消耗占欧盟28国温室气体排放的25%,并且自1990年以来,其消耗显著增加。许多国家的政府已经采取了新的环境措施和法规,以减少温室气体排放和化石燃料的消耗(Keskin and Çatay, 2018)。
在过去的十年中,由于电动汽车(EVs)带来的环境优势,如没有温室气体排放、低噪音污染、高效率和低燃料成本(Desaulniers et al. , 2016; Murakami, 2017; 2018),EVs受到越来越多的关注,并且市场份额迅速增长。此外,EVs对电网有两个好处。一方面,由于大多数EVs在晚上充电,它们可以平衡多余的能量供应。另一方面,在智能电网中,EVs可以在白天的高峰时段作为电源使用(Kempton and Letendre, 1997)。世界上一些领先的快递公司正在使用EVs服务他们的客户。2018年11月20日,联邦快递宣布将增加1000辆EVs用于商业和住宅方面的上门收件及送货服务。2019年,DHL向美国推出了一个由63辆电动货车组成的新车队,首批30辆货车将运往旧金山湾区。2017年,京东首席执行官宣布,该公司将在2018年2月底之前将北京的货车车队改为EVs。2017年,中国销售了近58万辆EVs,是全球最大的EV市场,且占全球EV市场的一半(International Energy Agency, 2018)。
目前,EVs的普及仍面临若干个挑战(Schneider et al., 2014; 2018; Schiffer and Walther, 2017)。第一个挑战是EVs的行驶里程有限,到目前为止,EVs的平均行驶里程约为200公里。EVs的最大行驶里程通常低于同类以汽油为动力的汽车。此外,低温可以显著降低驾驶里程。因此,EV司机在安排路线时必须谨慎,以确保EVs不会耗尽电量。第二个挑战是EVs充电时间过长。电池充满电最长可达8小时,充电时间随电池年龄的增加而增加。第三个挑战是EVs的成本高,特别是过高的电池价格。最后一个挑战与充电基础设施的不成熟有关,这会造成EVs充电不方便。
车辆路径问题(VRP)自Dantzig和Ramser(1959)提出以来,在过去几十年里得到了广泛的研究。VRP的目标是通过从车辆中心出发并返回到车辆中心的多条车辆路线,在满足各种约束的条件下,使访问一组客户的总运输成本最小。关于VRP更全面的概述,读者可以参考Toth and Vigo(2002)、Golden等人 (2008)、Eksioglu 等人 (2009)和Braekers等人 (2016)。通过查阅文献,我们发现最具代表性的VRP变种问题主要包括带时间窗的VRP (Solomon, 1987; Bräysy and Gendreau, 2005a; 2005b),选址路径问题(Nagy and Salhi, 2007; Prodhon and Prins, 2014; Schneider and Drexl, 2017),dial-a-ride问题(Cordeau and Laporte, 2007; Liu et al., 2015; Ho et al. , 2018; Luo et al., 2019),带载重限制的二级VRP (Perboli et al., 2011;Baldacci et al., 2013; Liu et al., 2018),同时取货和送货问题(Savelsbergh and Sol, 1995; Nagy et al. 2015),边路径问题(Dror, 2000; Corberán and Prins, 2010;Yu et al., 2019a),周期性车辆路径问题(Zhang et al., 2013; Campbell and Wilson, 2014; Luo et al., 2015)和货物可拆分VRP (desaulniers, 2010; Archetti and Speranza, 2012; Luo et al., 2017)。
电动VRP (EVRP)的研究是在Erdoğan和Miller-Hooks(2012)提出的绿色VRP (GVRP)之后正式开展的。仔细分析文献后,我们发现几乎所有的扩展问题都是对应VRP的延伸。例如,EVRP是VRP的延伸问题,电力选址路径问题可以看作是 选址 路径问题的延伸。与VRPs相比(如图1所示),EVRP的求解难度来自于 EV s行驶里程较短以及在行驶路线上需要进行充电的问题(如图2所示)。事实上,EVRP对VRPs的扩展主要通过考虑以下四个方面来实现:1)充电(或换电池)站的位置(Yang and Sun, 2015; Schiffer and Walther, 2017);2)采用全部或部分充电策略(Keskin and Çatay, 2016; Sweda et al., 2017a; 2017 b; Macrina et al., 2019a);3)充电时间与充电电量的函数关系(Montoya et al., 2017; Froger et al., 2019);4)多种类型的充电站(Felipe et al., 2014)。

图1. VRP的一个例子
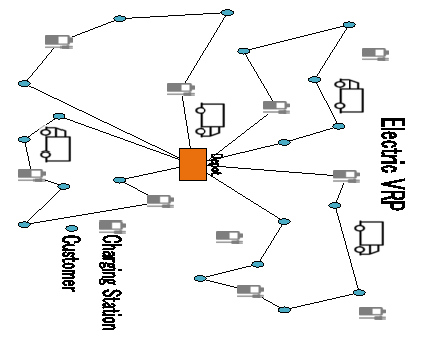
图2. EVRP的一个例子
在本论文中,我们只回顾使用 EV s并考虑充电操作的路径问题。在现有的研究中,有很多学者探究了关于EVs的路径问题,如Doppstadt等人(2016),Nejad等人(2017),Sassi和Oulamara(2017)以及Murakami(2017),但他们没有考虑沿路充电操作,因此我们不作讨论。虽然Afroditi 等人(2014)研究了受行业限制的EVRP,但此研究仅包含少量参考文献。最近,Erdelić和Carić(2019)回顾了关于EVRP的变种问题和解决方法。解决方法大致可以分为两大主流,即元启发式算法和精确算法。然而,作者只提到了有关元启发式用于求解相关问题。 根据数据统计,近两年发表关于EVRP的论文数量占总论文数量的40%以上。在Erdelić和Carić(2019)中,只审查了过去两年中的部分论文,很多变种问题并没有被提及。由于关于EVRP的研究处于上升阶段,目前的相关文献并不丰富,因此我们回顾的文章只有50篇左右。图3和图4分别显示了近九年在各相关期刊上发表的论文数量。图5显示了相关期刊论文分布的词云图。

图3. 近九年来发表的论文数量

图4. 每个期刊上发表的论文数

图5. 杂志名称的词云图
本文的剩余部分结构如下。在第2节中,本文回顾仅使用一辆EV的电动旅行商问题(ETSP)。在第3节中,我们全面探索GVRP,该问题是一个被广泛研究的EVRP特例。在第4节中,我们将重点介绍基本EVRP以及其扩展问题,这些扩展问题考虑额外的函数,如收费函数和时间窗。由于在很多情况下,运营商需要同时调度各种类型的车辆,包括EVs、混合EVs和传统汽车。许多学者已经研究了调度混合车队的方法,因此第5节将给出混合EVRP (MEVRP)的相关调查。随后,第6节中讨论电力选址路径问题(ELRP),该问题同时对充电设施的选址和EVs的路径进行决策。在第7节中,概述了所有其他EVRP变种问题,包括杂交EVRP(HEVRP)、电动dial-a-ride问题(EDARP)、电动二级VRP (E2EVRP)以及带时间窗的电动同时取货送货问题(EPDPTW)。本文研究的问题类别如图6所示。每个类中都有若干个变体,它们之间的联系和各个特性将在相关章节中介绍。最后,第8节对本文进行了总结。

图6. 本研究调查的EVRP类
2 电动旅行商问题
旅行商问题(TSP)是计算数学中研究最深入的问题之一(Gutin and Punnen, 2007)。ETSP是EVRP的一种特例,它通过只考虑一个EV来扩展TSP。当每个客户有一个时间窗时,我们可以获得一个变种问题,即带有时间窗的ETSP(ETSPTW)。该问题的目标是在保证时间窗约束不被违反且电池电量始终为正的情况下,找到一条访问一组客户的最短哈密顿环 (Roberti and Wen, 2016)。在车辆行驶过程中,车辆可以在充电站进行充电。Roberti和Wen(2016)在ETSPTW中考虑了两种充电策略,即充分充电(每个充电站都对电池充满电)和部分充电(每个充电站可以对电池充任意电量),并在论文中给出了该问题在两种充电策略下的混合整数规划(MIP)模型。随后,他们设计了一种三阶段启发式来解决ETSPTW,其中算法的组件需要适应不同的充电策略。该启发式是建立在da Silva和Urrutia(2010)和Mladenović等人(2012)用于求解带时间窗TSP (TSPTW)的算法之上得到的。该算法最先生成一系列违背时间窗和电池容量约束的哈密顿环。最后三阶段启发式作用在每一个产生的环上。应用变邻域下降(VND)过程使得每个客户的时间窗均被满足;使用基于VND的局部搜索算法在保证时间窗约束满足的前提下,尽量降低路径成本;通过执行动态规划算法使行程满足电池容量约束,并在必要时插入充电站。作者基于文献中提供的TSPTW基准算例生成了两组测试算例。对于包含20个客户且有两个充电策略的算例,所提出的算法能够得到大多数算例的最优解。他们还对该算法进行适应性调整用于求解TSPTW算例,与da Silva和Urrutia(2010)提出的一般VNS相比,获得的结果非常具有竞争力。
市场上存在各种类型的充电站,它们使用不同的充电技术。因此,各个充电站的充电速率可能不同。Küçükoğlu等人(2019)通过考虑多种充电率的影响,引入了一个新的问题,即混合充电率ETSPTW(ETSPTW – MCR)。为了解决这一问题,他们提出了一种新的、有效的混合模拟退火/禁忌搜索(SA/TS)算法。该算法通过采用有效的搜索策略、解的接受准则和两种禁忌列表,改进了现有的SA和TS混合算法。ETSPTW-MCR采用双态过程求解。首先,混合SA/TS算法考虑TSPTW中的约束条件寻求成本最小的解;然后,采用动态规划算法得到ETSPTW-MCR的可行解。对于只包含客户的路线,动态规划算法通过将充电站插入该路线生成最优运营方案。在实验中,作者采用自己的算法求解关于TSPTW、ETSPTW和ETSPTW –MCR的算例。与现有求解TSPTW和ETSPTW的算法相比,提出的算法取得了比较好的结果。此外,该算法产生的结果是稳定的,因为大多数结果的标准差是零或接近于零。ETSP及其变种问题如图7所示,其中对于每个弧线,其末端的问题是其根源问题的延伸。
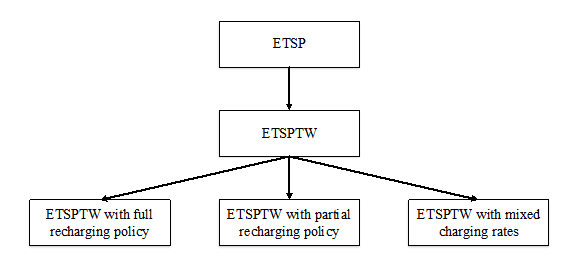
图7. ETSP及其变体
3 绿色车辆路径问题
GVRP是由Erdoğan和MillerHooks(2012)正式提出的,它不考虑车辆的容量,是EVRP的一个特例。这个问题被定义在一个有向图G=(V,E)上,顶点集V=NF,其中N表示顾客集合,F充电站集合,顶点0代表车辆中心。每个客户都有一个服务时间,每个边都有与之对应的距离和行驶时间。车辆中心配有无限数量的同质可替代燃料汽车(AFVs)。每个AFV的最大驾驶时间为T分钟,燃油容量为Q。车辆燃油消耗量与行驶的距离成线性正比。若h为单位距离耗油率,则车辆不加油所能行驶的最大距离D可计算为D=Q/h。每个AFV可以在任何一个加油站加油。假设AFV必须完全加满油,每次在加油站停留都产生恒定的时间S分钟。GVRP的目标是寻找一组不超过m条从仓库出发和结束的路线,服务所有客户,并以最小化总行驶距离为目标。关于GVRP求解算法的信息汇总在表1中。
表1. GVRP的解决方案
| 参考文献 | 方法 | 结果 | 优点 | 缺点 |
| Erdoğan and Miller-Hooks (2012) | 构造性启发式 | 在40个包含20个客户的和12个包含500个客户的真实算例中进行测试,表现良好 | 快速 | 低质量 |
| Koç and Karaoglan (2016) | 分支切割算法 | 可得到40个小规模算例中22个算例的最优解 | 最优解 | 缓慢 |
| Montoya et al. (2016) | 两阶段启发式 | 可得到8个算例的新的最优解并得到40个算例的最优解 | 快速 | 接近最优解 |
| Yavuz (2017) | 迭代波束搜索算法 | 在大规模算例上表现优越 | 可准确地或近似地求解问题 | |
| Leggieri and Haouari (2017) | 基于MIP模型的简化程序 | 优于Koç和Karaoglan(2016)提出的分支切割算法 | 最优解 | 缓慢 |
| Andelmin and Bartolini (2017) | 基于集划分模型的精确算法 | 可得到包含110个顾客的最优解 | 最优解 | 缓慢 |
| Affi et al. (2018) | 可变邻域搜索启发式 | 可得到12个大规模算的中11个算例的最优解 | 快速 | 接近最优解 |
| Andelmin and Bartolini (2019) | 多开始局部搜索启发式 | 可得到8个算例新的最优解,及其余算例的最优解 | 快速 | 接近最优解 |
Erdoğan和Miller-Hooks(2012)提出了GVRP的MIP模型,并设计了两种启发式来解决该问题。第一个启发式算法是对求解经典VRP设计的Clarke - Wright节约算法(Clarke and Wright, 1964)进行改进得到的。第二种是基于密度的聚类算法,该算法是建立在密度空间聚类的应用与噪声算法的概念(Ester et al., 1996) 之上得到的。这两种启发式算法生成的路径通过两种分别应用于路径间和路径内的边交换算子进一步得到改进。作者基于40个自生成的算例对他们的算法进行了测试。实验结果表明,这些启发式算法具有较好的求解性能。Koç和Karaoglan(2016)针对GVRP提出了一种新的MIP模型,并使用分支切割算法来解决该问题。在分支切割算法的求解过程中,采用了一种包含四个邻域搜索算子的SA算法来获得问题的可行解。在他们的实验中,Koç和Karaoglan(2016)将他们提出的模型与Erdoğan和Miller-Hooks(2012)的模型进行了比较;结果表明,新模型能产生较好的下界。对于40个包含20个客户的算例,分支切割算法可以得到22个算例的最优解。Montoya等人(2016)提出了一种有效的两阶段启发式来解决GVRP问题。在第一阶段,该启发式算法通过一组随机的路径优先簇其次的启发式算法(Beasley, 1983; Prins et al., 2014年)和插入替代燃料站的优化程序相结合建立一个路径池。在第二阶段,启发式算法通过求解集合划分模型寻求GVRP的可行解。作者使用Erdoğan和Miller-Hooks(2012)中的52个算例进行实验,并将结果与Erdoğan和Miller-Hooks(2012)、Schneider等人(2014;2015) 以及Felipe等人(2014)得到的最佳结果进行比较。数值结果显示,该启发式方法可以得到8个算例新的最优解,40个算例的最优解,以及另外4个与最优解非常接近算例的解。
Yavuz(2017)设计了一种迭代光束搜索(IBS)算法来解决GVRP。该算法构造了一棵搜索树,能够部分或全部地探索解空间。搜索树由节点和分支组成,其中叶节点对应完整解,其他节点代表部分解。该算法可以采用不同的上界和下界策略,并可以通过占优准则加速。Yavuz(2017)在Erdoğan和Miller-Hooks(2012)以及Yavuz和Çapar(2017)提供的算例上测试了他们的算法。实验结果表明,在Yavuz和Çapar(2017)获得解的30个算例上,精确IBS算法的计算性能优于CPLEX 12.6。此外,对于数据规模更大的算例,与文献中已知的最优解相比,该算法也更有效。Leggieri和Haouari(2017)设计了一种实用的解决方法,该方法使用了一种新的MIP模型和一个简化程序来解决GVRP问题。这种新模型有两个优点。首先,它包含多项式个变量和约束,因此可以由求解器求解。其次,它十分灵活,可以通过适应性的改变处理许多变种问题。此外,作者提出了简化程序用于修正二进制变量,以缩小问题规模和提高计算速度。他们在Erdoğan和Miller-Hooks(2012)使用的算例上测试了他们的模型,结果证明直接求解他们的模型比Koç和Karaoglan(2016)提出的分支切割算法更具有优势。
Andelmin和Bartolini(2017)提出了一种求解GVRP的精确算法,并将问题表述为一个基于多重图的集合划分模型,其中列对应可行路径。该模型通过三类有效不等式得到了增强,即弱子集行不等式、子集行不等式和k-path不等式。该精确方法遵循了Baldacci等人(2008; 2011)所展示的一般框架。 作者对两组算例进行了实验,一组来自Erdoğan和Miller-Hooks(2012),另一组是自生成的算例。计算结果表明,该算法可以得到包含多达110个客户算例的最优解。基于多重图模型的构建,Andelmin和Bartolini(2019)还为GVRP设计了一种多起点局部搜索启发式。该启发式包括三个阶段:前两个阶段为构造新的解,通过局部搜索过程对得到的解进行改进,然后将所有得到的路径存储在路径池中;最后通过求解集合划分模型对路径池中的路径进行最优组合,并通过局部搜索对最终解进行改进。作者使用来自Erdoğan和Miller-Hooks(2012)的52个算例和自生成的40个算例测试了他们的启发式。对于52个算例,该启发式算法找到了8个新的最优解,并得到了其余算例已知的最优解。对于40个算例,该启发式算法找到了23个最优解,并且上界的平均值与最优值的误差在0.27%之内。Affi等人(2018)使用VNS启发式 (Mladenović和Hansen, 1997) 解决GVRP问题,并同样使用Erdoğan和Miller-Hooks(2012)提出的52个GVRP算例测试了他们的算法。与文献结果相比,该VNS算法以更少的计算时间提供了所有小规模算例的最优解。对于较大规模的算例,在12个算例中,该算法可以得到11个算例的最优解,算法性能优于文献中其他现有启发式算法。
4 电动车辆路径问题
EVRP涵盖了电动汽车和充电操作,是经典VRP的直接延伸。本节首先提供了EVRP的MIP模型,然后介绍了关于它的几种扩展问题和变种问题。在文献中,将EVRP进行扩展的方式一般是考虑了许多特征,如多类型充电站、总能耗最小化、多车场、能源消耗不确定性、异构电动汽车、时间窗和非线性充电函数。根据发表的文章数量,我们发现EVRP的两个主要扩展方向,即考虑时间窗(Schneider et al., 2014)和考虑非线性充电函数(Montoya et al., 2017)。表2总结了EVRP及其变种问题,并显示了问题名称、考虑的特性和求解算法。
表2. EVRP及其变体
| 参考文献 | 问题名称 | 特性 | 方法 |
| Zhang et al. (2018a) | 载重限制的GVRP | 零充电时间 | 两阶段启发式和基于蚁群系统的元启发式 |
| Granada-Echeverri et al. (2020) | EVRP与回程 | 两种类型的客户 | 迭代局部搜索 |
| Felipe et al. (2014) | GVRP具有多种技术和部分充电策略 | 多种充电技术和部分充电 | 构造启发式、变邻域搜索和模拟退火 |
| Lin et al. (2016) | 一般EVRP | 运送或收集产品以及车辆载重 | MIP模型 |
| Shao et al. (2018) | EVRP | 固定的充电时间 | 混合遗传算法 |
| Zhang et al. (2018b) | EVRP | 充分充电策略,零充电时间 | 蚁群算法和自适应大邻域搜索启发式 |
| Li et al. (2019) | 多车辆中心GVRP | CO2排放 | 改进蚁群优化算法 |
| Pelletier et al. (2019) | 能耗不确定的EVRP | 能耗不确定 | 割平面算法和基于大邻域搜索的两阶段启发式 |
| Schneider et al. (2014) | 带充电站的EVRPTW | 时间窗 | 结合变邻域搜索和禁忌搜索的混合启发式 |
| Desaulniers et al. (2016) | EVRPTW | 时间窗 | 分支定价与切割算法 |
| Keskin and Çatay (2016) | EVRPTW | 时间窗和部分充电策略 | 自适应大邻域搜索 |
| Hiermann et al. (2016) | 电动车队规模和混合VRP,时间窗和充电站 | 时间窗和异构电动车 | 分支定价算法和自适应大邻域搜索 |
| Zhao and Lu (2019) | 现实世界EVRP | 异构电动车,全充电策略,恒定充电时间 | 基于自适应大邻域搜索启发式和集划分模型的启发式 |
| Yu et al. (2019b) | 异构车辆的VRPTW | 异构电动车,全充电政策,碳排放 | 分支定价算法 |
| Wen et al. (2016) | 电动汽车调度问题 | 全充电策略,多车辆中心,可变充电时间 | 自适应大邻域搜索启发式 |
| Wang et al. (2019) | 多车辆中心GVRP,共享运输资源 | 多车辆中心,共享运输资源,时间相关的速度,违反时间窗的分段惩罚成本 | 混合启发式 |
| Keskin and Çatay (2018) | 带时间窗和快速充电的EVRP | 部分充电策略和多种类型充电站 | 两阶段启发式 |
| Verma (2018) | 带时间窗、充电站和电池交换站的EVRP | 充电器和电池的交换 | 两步启发式 |
| Kancharla and Ramadurai (2018) | 能耗与载重相关EVRP | 能耗与载重相关 | 自适应大邻域搜索启发式 |
| Cortés-Murcia et al. (2019) | 带时间窗EVRP,部分充电和卫星客户 | 部分充电和卫星客户 | 包括迭代局部搜索,可变邻域搜索和集划分模型的混合启发式 |
| Montoya et al. (2017) | 具有非线性充电函数的EVRP | 非线性充电函数 | 结合迭代局部搜索和集中算法的混合启发式 |
| Froger et al. (2019) | 具有非线性充电函数EVRP | 非线性充电函数 | 启发式和精确标记算法 |
| Zuo et al. (2019) | 具有凹非线性充电函数的EVRPTW | 非线性充电函数 | 没有定制的解决程序 |

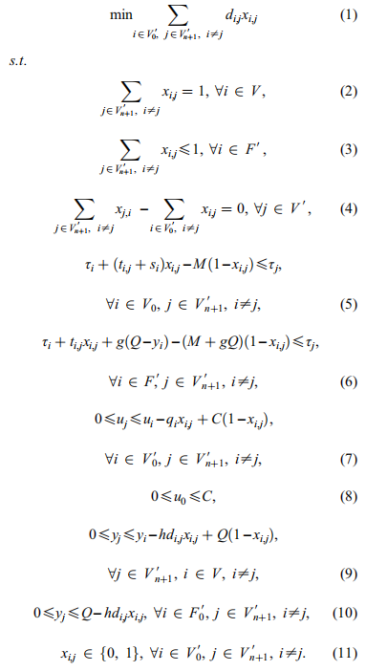
在上述模型中,M是一个足够大的正数。目标(1)使总行驶距离最小。约束(2)保证每个客户只能被服务一次,约束(3)规定每个虚拟充电站最多被访问一次。约束(4)表示车流量守恒约束。约束(5)和(6)定义连续访问两个点i和j的u i 和u j 的平衡关系。约束(7)和(8)保证每个客户的需求被满足。最后,约束条件(9)和(10)保证电池电量永远不会低于0。
Zhang等(2018a)研究了不考虑充电时间的EVRP的一种特殊情况,即有载重限制的GVRP,并提出了两阶段启发式和基于蚁群系统的元启发式两种求解算法。在两阶段启发式算法的第一阶段,采用最近邻域贪心算法求解TSP问题。在第二阶段,根据剩余燃料和剩余产品,在TSP路径中插入充电站和车辆中心,生成可行解。随机生成的算例包括10个小规模算例,其中客户数量为15 ~ 24个,充电站数量为2;此外,20个大规模算例,其中客户数量为25、50、70、100和150,充电站数目为2、4、6和8。实验结果表明,蚁群算法的性能比两阶段启发式算法提高了38.27%。Granada-Echeverri等人(2020)研究了为两组客户提供服务的EVRP。第一组客户需求给定数量产品,第二组客户需要将给定数量产品发送到仓库。此外,这个问题要求在访问第一组客户后再访问第二组客户。为了解决这一问题,作者提出了一种迭代局部搜索算法,利用路径间和路径内的操作来探索与解编码策略相关的搜索空间。
据我们所知,现有研究标准EVRP的论文数量非常有限。事实上,大多数文献研究了标准EVRP的扩展和变种问题。Felipe等人(2014)推出了一种具有多种技术和部分充电的EVRP。与标准EVRP不同,该问题考虑了不同类型的充电站,允许在充电站充任意电量。每种充电站都有给定的充电速度和单位充电成本。该问题的目标是使总充电成本最小,总充电成本由固定成本和可变成本组成。每个充电操作的固定成本由电池成本除以估计的最大充电操作次数给出。充电操作的可变成本与充电电量成正比,也取决于充电站的类型。作者采用了三种启发法来解决他们的问题。第一类是构造启发式,目的是用较短的计算时间生成可行解。第二种类型是使用三个邻域操作的VNS启发式算法,即重置充电站、2-opt和重新插入。最后一种是SA算法。Lin 等人(2016)提到了一种一般性的EVRP,其目标是最小化总成本,包括电池充电成本、出行时间成本和电池充电等待时间成本。另外,这个问题也可以处理同时送货和取货的操作。在成本计算过程中,考虑了车辆载重和行驶速度,假设每边行驶速度为已知常数,车辆载重随路径变化。Lin等(2016)通过实验研究表明,载重在车辆路径决策中是不可忽视的。
Shao等人(2018)提出了一种最小化固定车辆成本、出行成本和充电成本之和的EVRP。该文假设充电时间为常数,并采用全充电策略。为了解决这个问题,作者设计了一种杂交基因算法,它是遗传算法和局部搜索的结合。Zhang等人(2018b)提出了一种EVRP,旨在最小化所有EVs消耗的总能量。能耗的多少取决于若干个因素,如行驶距离,车辆重量,车辆速度和发动机效率。在该问题中,也采用全充电策略,但不考虑充电所消耗的时间,即每个充电站的服务时间为零。为了解决该问题,Zhang等人(2018b)提出了蚁群算法和自适应大邻域搜索(ALNS)启发式(Ropke and Pisinger, 2006)。在一组自生成算例上进行实验,发现蚁群算法能够为小规模算例提供接近最优的解,在求解质量和计算时间方面优于ALNS启发式算法。Li 等人(2019)研究了一个多车辆中心的EVRP,该EVRP有四个目标,即收益最大化、成本最小化、车辆行驶时间最小化和二氧化碳排放量最小化。他们用改进蚁群优化算法求解该问题。
在实际应用中,由于天气、路况、驾驶员行为等因素,以及一些难以精确确定的能源消耗参数,能源消耗总量是不确定的。为了解决这一问题,Pelletier等人(2019)引入了具有能耗不确定性的EVRP,并提出了一个鲁棒优化框架来解决上述不确定性。与确定性EVRP不同的是,该问题假设每条边都有一个预期空车能耗(kWh)和一个预期载重能耗率 (kWh/kg)。由于环境的不确定性,真实的能耗值与期望值存在偏差。作者将随机问题转化为确定性MIP模型,其目标函数是最小化EVs的总固定成本、总维修成本与总行驶距离的比例以及最坏情况下的能源成本。作者首先使用割平面算法来得到小规模算例的最优解。之后,他们开发了一种基于大型邻域搜索(LNS)的两阶段启发式以寻找大规模算例的最优解。
4.1 带时间窗的EVRP
Schneider等人(2014)提出了 带时间窗的EVRP ( EVRPTW)。EVRPTW的MIP模型可以通过在模型(1)-(11)中添加时间窗约束得到。作者设计了一种混合启发式算法,该算法结合了VNS算法和TS启发式算法(简称VNS/TS)来解决EVRPTW。他们通过实验来评估该方法的性能。首先,针对小规模算例他们将VNS/TS启发式与CPLEX进行对比。结果表明,VNS/TS启发式能够在数秒内得到这些算例的最优解。对于大多数算例,CPLEX使用了多的计算时间。此外,在36个算例中,有11个算例CPLEX无法产生最优解。其次,针对一组中等规模算例,作者对该算法的效率进行了分析。最后,他们阐述VNS/TS启发式具有解决GVRP、VRPTW和多站VRP的能力(Crevier et al., 2007)。Desaulniers等人(2016)为 EVRPTW 的四个变种问题设计了 分支 定价割平面算法,具体如下:1)每个路线最多允许访问一个充电站并且充分充电策略被采用;2)每个路径可以访问多个充电站并且充分充电策略被采用;3)每个路线最多允许访问一个充电站并且部分充电策略被采用;4)每条线路可访问多个充电站并且部分充电策略被采用。实际上,第二个版本与Schneider等人(2014)研究的问题完全相同。分支定价割平面算法遵循一个标准框架,包括列生成过程、割平面和分支策略。Keskin和Çatay(2016)专注解决带部分充电策略的EVRPTW,并开发了一种ALNS启发式。该启发式算法使用新的插入和移除机制来处理问题的结构,包括客户移除、充电站移除、客户插入和充电站插入。作者将该启发式应用于带完全充电策略的EVRPTW算例,并为四个算例找到了新的最优解。此外,他们还表明,与完全充电相比,部分充电策略可能会大大改善解决方案。
文献中的其他探究问题集中于EVRPTW的扩展。Hiermann等人(2016)通过考虑异构EVs对 EVRPTW 进行了扩展, 由此产生的问题称为异构EVRPTW (HEVRPTW)。可用的车辆类型在承载能力、电池容量、单位距离能耗、单位能量充电时间和成本等方面有所不同。作者提出了两种HEVRPTW模型,即弧流模型和集合划分模型。然后,他们应用分支定价算法求解集合划分模型,求得问题的最优解。然而,通过这种精确方法可以求得最优解的算例规模是有限的。为了处理具有实际规模的算例,他们还开发了一种基于ALNS的启发式算法。该启发式算法采用局部搜索方法来强化每次迭代的搜索过程。由于ALNS启发式算法对于充电站的安置能力较低,作者增加了后处理流程,以便对一条路径中顾客访问顺序不变的情况下改进充电站的选择和定位。这个后优化过程是通过一个标记算法实现的,并假设任何两个连续的客户之间最多可以放置一个充电站,以减少计算时间。Zhao和Lu(2019)也研究了采用全充电策略的HEVRPTW,无论剩余电量如何,均假设各类型EVs充电时间不变。该问题的目标是使EV购置、出行、充电和等待成本的总和最小。作者设计了一种基于ALNS和集划分模型的启发式方法来解决该问题。该启发式算法首先应用ALNS搜索解空间,并将搜索过程中得到的可行路径存储在路径池中。然后,利用池中的路径构造集划分模型,使用MIP求解器进行求解。由于路径池是所有可行路径的子集,因此集划分模型的最优解只能看作是近似最优解。Yu等人(2019b)研究了采用异构EVs带时间窗的GVRP(GVRPTW),并试图将总碳排放降至最低。该问题考虑了车辆的承载能力,因此本质上是HEVRPTW。作者开发了一个分支定价算法来得到该问题的最优解。
Wen等人(2016)研究了采用全充电策略且多车辆中心的EVRPTW,并认为充电时间与充电量成比例。每个顶点都有固定的开始时间,相当于开始和结束时间相同的服务时间窗。此外,每个车辆中心或充电站都有特定的时间窗来供EVs访问。作者通过一种ALNS启发式来寻找问题的近似最优解。Wang等人(2019)通过考虑运输资源共享、依赖于时间的速度和违反时间窗的分段惩罚成本对多车辆中心的EVRPTW进行了扩展。作者提出了以总碳排放和运营成本最小的双目标模型,并设计了一种混合启发式来解决该问题。Keskin和Çatay(2018)对EVRPTW进行扩展,在该问题中允许部分充电,并考虑在每个充电站配备三种类型的充电器,即正常、快速和超快速充电器。越快的充电器消耗的时间越少,而单位能量消耗成本越高。这个问题以最小化车辆数量为首要目标,以最小化能源消耗总成本为次要目标。为了解决这一问题,作者提出了一种两阶段元启发式方法,在第一阶段采用ALNS启发式方法寻找近似最优解,在第二阶段采用以MIP求解器为辅助的精确方法进一步提高解的质量。具体来说,精确算法使用了一个简化的MIP模型,该模型确定了客户的顺序,并根据充电站和充电类型的选择以及充电量来做出决定。
电池更换是EVs充电的另一种方式。通常情况下,EVs的电池只需5分钟就可以更换为充满电的电池。Verma(2018)提出了EVRPTW的变种问题,其中充电站不但提供充电装备而且提供电池进行交换。为了解决这个问题,他们设计了一个包含两个步骤的启发式算法。在第一步中,结合有效下界和上界的局部搜索来确定每个充电站的访问次数。在第二步中,该启发式算法利用遗传算法确定配送计划的路径成本。在启发式中,允许违反对电池容量和时间窗的约束。许多研究已经发现(Zhang et al., 2012; Luo et al., 2017)车辆载重可以影响能源消耗和运输成本。Kancharla和Ramadurai(2018)考虑车辆载重对能源消耗的影响对EVRPTW进行扩展。实际上,单位距离的电耗是与其速度和载重有关的函数。作者应用了一种带有几个特殊算子的ALNS启发式来寻找问题的近似最优解。Cortés-Murcia等人(2019年)引入了EVRPTW的新变种问题,涉及卫星客户的概念。在任何充电站为EVs充电期间,若EVs上的货物可以通过步行、自行车和无人机等其他交通方式交付给客户,这些客户被称为卫星客户。假设在每次充电操作中,最多可以访问一个卫星客户。作者采用了一种由迭代局部搜索、变邻域下降和 集划分模型 组成的混合启发式算法求解该问题。
4.2具有非线性充电函数的EVRP
在现有的EVs路径问题的研究中,大 多数都假设 充电时间是充电量的线性函数 。而 充电时间大致可以分为两个阶段,第一阶段充电时间与充电量呈线性关系,第二阶段充电时间与充电量呈非线性关系。面对这一现实,Montoya等人(2017)将充电过程的非线性特征引入EVRP模型,由此产生的问题称为具有非线性充电函数的EVRP(EVRP -NL)。如图8所示,充电过程可近似为分段线性函数。作者提出了一个MIP模型并且使用一种基于迭代局部搜索和集中启发式的混合元启发式算法求解该问题。与Montoya等人(2017)使用的模型相比,Froger等人(2019)为EVRP-NL提出了两种新的MIP模型。随后,他们提出了一种启发式和精确标记算法来解决这一问题。大量实验用于比较分别使用Gurobi 7.5.0直接求解MIP模型、启发式和精确标记算法得到的求解结果。Zuo等人(2019)专注将EVRP-NL建立新的MIP模型,不使用虚拟的顶点或边。在这项工作中,没有给出量身定制的解决方法。通过实验,他们将自己的模型与传统模型进行了比较,证明了自己的模型的优越性。
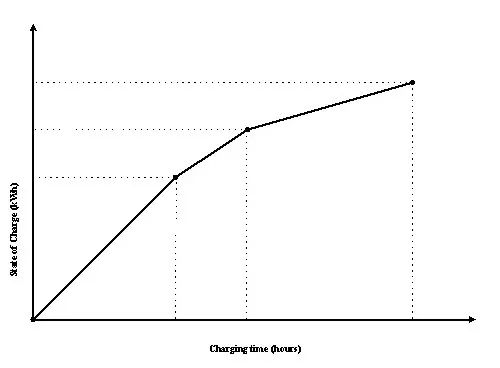
图8. 非线性充电函数的分段线性逼近
5 混合电动汽车路径问题
许多公司既拥有EVs,也拥有传统汽车 (CVs )。因此,在许多情况下,为包含EVS和CVs的混合车队规划路径十分有必要。虽然EVs的能源成本较低,但由于在充电操作上花费的时间使得劳动力成本可能会增加。有许多文章研究了EVS和CVs混合车队的调度问题,如表3所示。Goeke和Schneider(2015)提出了一种考虑时间窗和混合车队的EVRP。这些车辆的能耗函数与车速、坡度、载重有关。作者将该问题表述为一个非线性的MIP模型,且不能由一般的求解器直接处理,如CPLEX和Gurobi。为了找到该问题高质量的解,作者开发了一种ALNS启发式算法,该算法通过局部搜索程序来增强搜索过程。这种ALNS启发式算法有三个主要特点。首先,采用自适应机制来选择每次迭代中使用移除操作算子移除的客户数量;其次,采用替代违规来避免计算时间窗和电池容量的违背值;最后,在计算求解目标值时,采用考虑不同惩罚因素的接受准则。
表3. MEVRP及其变体
| 参考文献 | 问题名称 | 特性 | 方法 |
| Goeke and Schneider (2015) | 带时间窗和混合车队的EVRP | 能源消费函数 | 自适应大邻域搜索启发式 |
| Hiermann et al. (2019) | 带时间窗和充电站的混合异构电力车队路径问题 | 时间窗、传统、插电式混合动力和电动汽车 | 由遗传算法、局部搜索和大型邻域搜索组成的启发式 |
| Macrina et al. (2019a) | 绿色混合车队VRP与部分充电和时间窗 | 部分充电和时间窗 | 迭代局部搜索启发式 |
| Macrina et al. (2019b) | 具有混合车队、部分充电和时间窗的节能GVRP | 部分充电,时间窗,能源消耗功能,加速和制动阶段的影响,电池寿命 | 大型邻域搜索启发式 |
Hiermann等人(2019)研究了一个同时调度CVs、EVS和插电式混合EVs ( H EVs )的问题。HEVs有两个发动机,一个内燃机,一个电动发动机,因此可以切换到内燃机以避免访问充电站。使用内燃机时单位距离的行驶成本要高于使用电动发动机时的行驶成本。为了解决这一复杂问题,Hiermann等人(2019)设计了一个由遗传算法、局部搜索程序和LNS程序组成的元启发式算法。评估给定路线的质量是困难的,因为在最优地决定充电站的访问次数、到达时间和可能的引擎模式的计算成本很高。为此,本文采用启发式评估方法来近似计算每条线路的成本,且计算时间较短。具体而言,该方法基于一种分层优化算法,结合标记技术和几种贪婪评估策略用于充电站插入和引擎模式选择。该方法一方面执行通用的算法子程序,另一方面求解了一个集合划分模型以重组在搜索过程中遇到的路径。在遗传算法中嵌入一个LNS作为突变算子。在每次迭代结束时,执行局部搜索过程,进一步改进遗传算法和集划分模型生成的解。
Macrina等人(2019a)提出了GVRPTW的一个新变种问题,该问题可以优化由 E Vs和CVs组成的混合车队。EVs可以在任何充电站进行部分充电。该问题的目标函数由四个部分组成,即所有EVs充电成本、EVs的固定成本、EVs的可变出行成本、CVs的可变出行成本。针对这一问题,作者提出了一种迭代局部搜索启发式算法,该算法主要由一个扰动过程和一个局部搜索过程组成。通过实验,他们展示了时间窗和部分充电策略如何影响解的质量。随后,Macrina等人(2019b)将问题进行扩展,包括:1)将速度、加速度、减速、装载货物和道路坡度考虑在内的综合能耗函数;2)考虑加速和制动阶段的影响;3)考虑与电池寿命相关的现实特性。Macrina等人(2019a)只使用了标准的LNS启发式来解决该问题,并没有详细介绍该算法的细节。
6 电动选址路径问题
在为 E Vs规划路径之前,我们需要知道充电(或电池交换)站的位置。在大多数文献中,充电站的位置是提前知道的。但在某些情况下,需要同时确定充电站的位置和EVs的行驶路径,这就是对ELRP的研究。在ELRP中,有一个车辆中心,一组有特定需求的客户,一组建设充电站的候选点以及一组从车辆中心出发向客户配送货物的相同EVs。每个客户只能由一辆车来服务。每辆EV必须从车辆中心出发并在车辆中心结束,载货量不能超过车辆的载重限制。充电站的建设成本是固定的,运输成本与EVs的行驶距离成正比。该问题的目标是确定充电站的位置和所有EVs的路线,同时最小化总成本和满足所有客户的需求。表4列出了最近有关ELRP及其变种问题的研究。
表4. ELRP及其变体
| 参考文献 | 问题名称 | 特性 | 方法 |
| Yang and Sun (2015) | 具有载重限制电动汽车的电池交换站选址路径问题 | 电池更换站的选址和EV路径 | 结合禁忌搜索和改进的Clarke-Wright保存算法和SIGALNS的两阶段启发式 |
| Hof et al. (2017) | 具有载重限制电动汽车的电池交换站选址路径问题 | 电池更换站的选址和EV路径 | 自适应变邻域搜索启发式 |
| Schiffer and Walther (2017) | 带时间窗和部分充电的ELRP | 电池更换站位置、电动汽车路线、时间窗和部分充电 | 没有定制方法的MIP模型 |
| Zhang et al. (2019) | 随机需求下EV运输的选址路径问题 | 电池更换站位置、电动汽车路线和随机需求 | 由二元粒子群算法和变邻域搜索启发式组成的混合启发式 |
| Koç et al. (2019) | EVRP与共享充电站 | 电池更换站的位置,EV路线,多车辆中心,充电站的投资 | 多起点自适应大邻域搜索启发式 |
Yang和Sun(2015)提出了一个ELRP,旨在同时确定 电池交换站的位置和 E Vs的行驶路径。作者首先提供了一个基本的数学模型,并假设每辆车最多只能访问每个交换站或每个客户一次 (见图9(a)) 。随后,他们删除了这一假设,并给出了一个扩展的数学模型,其中EVs可以多次访问任何交换站(见图9(b))。为了解决这一问题,作者提出了一种两阶段启发式算法,该算法结合禁忌搜索算法、改进Clarke-Wright节约算法(下文简称TS-MCWS)和一种称为SIGALNS的四阶段启发式算法。在TS-MCWS中,采用禁忌搜索算法确定交换站位置,然后采用改进的Clarke-Wright保存方法根据给定的交换站位置确定车辆行驶路线。SIGALNS的第一阶段调用一个改进 的扫描算法来生成一个初始解。第二阶段采用迭代贪心算法选择候选交换子集,并将其分配给不同的路径。第三阶段采用ALNS启发式对车辆进行路径规划,最后阶段采用分割算法对解进行改进。Hof等人(2017)展示了如何通过自适应VNS (AVNS)启发式解决具有中间站点的VRP (Schneider et al., 2015)。他们使用Yang和Sun(2015)生成的基准算例进行了实验。与Yang和Sun(2015)使用的算法相比,AVNS启发式算法在减少计算时间的情况下可以显著地改进大多数算例已知的最优解。此外,他们观察到AVNS启发式算法在解的平均质量方面具有鲁棒性,与文献结果相比,能够显著减少交换站的数量。
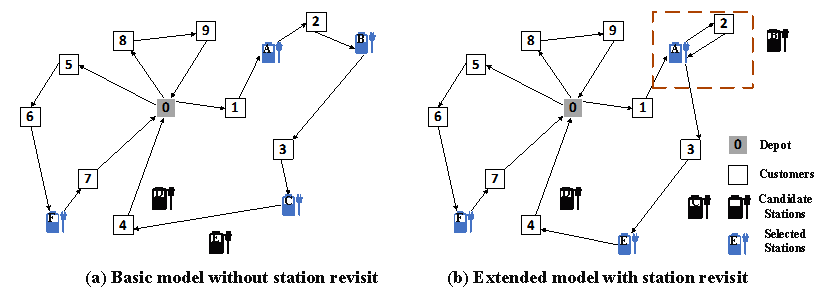
图9. ELRP中允许和不允许重访的比较
Schiffer和Walther(2017)重点研究了具有时间窗和部分充电的ELRP,该问题可为运输公司提供决策。作者将问题转化为一个MIP模型,并提出了四个目标函数,每个目标函数对应四个场景中的一种。之后,他们提出一个增强的MIP模型以减少计算时间。作者没有为该问题提供任何定制的解决算法,只是由一个通用的MIP求解器直接求解他们的模型,并且使用的是包含最多15个客户的小规模算例。通过实验,他们展示了强化模型的优点,部分充电策略带来的好处,以及不同目标函数对结果的影响。Zhang等人(2019)提出了具有随机需求的ELRP,目的是寻求最小成本的解,即提供电池更换站的最优位置和最优的路径规划。他们采用了经典的求助政策和预防重购政策来解决电池容量的影响。EV需要根据其当前充电状态选择最优的换站顺序。在选择过程中,EV必须面对两个相互冲突的目标,即最小化行驶距离和保持较高的电池电量。作者试图确定一个帕累托最优集,以加快交换站的选择。作者实现了一种由二进制粒子群优化(PSO)算法和VNS启发式算法组成的混合启发式算法来解决该问题。在实验中,作者通过与其他五种启发式方法进行比较,证明了他们提出算法的性能。Koç等人(2019年)提出了一个具有多车辆中心的ELRP,其中每家公司都运行一个由相同EVs车队、一个车辆中心和一组客户组成的系统。然而,这些公司共同投资安装和运营充电站。也就是说,充电站是由这些公司共享的。这个问题的目的是确定充电站的位置,并为每个公司决策EV的行驶路线。作者实现了一种多起点ALNS启发式来解决这个问题,并使用自生成的测试算例来评估算法。
7 其他变体
在本节中,我们回顾没有出现在上文EVRP 变种问题 的文献。除2篇文章外,所有文章均发表于2019年,因此每个变种问题的文章数量是有限的。
7.1 杂交电动车辆路径问题
Mancini(2017)引入了HEVRP,并假设车辆只有在电池功率耗尽后才会立即切换到燃料推进模式。作者将问题建立MIP模型,然后提出了一种将标准ALNS启发式与简化模型相结合的 元启发式算法 。元启发式算法从一个可行解开始,每次迭代都会删除两条路径,然后求解简化模型,该模型只考虑两辆车和被删除的路径中包含的顾客用于生成两条新路径。上述两个步骤迭代执行,直到终止条件满足。Yu 等人(2017)开发带有重启策略的模拟退火算法来解决这个问题。该算法有两个版本,分别采用Boltzmann和Cauchy函数来确定较差解的接受概率。我们建议读者阅读Dascioglu和Tuzkaya(2019)来了解2017年或之前发表的关于HEVRP论文。下面,我们介绍了两篇最近发表的论文。
Li等人(2018)提出了一种使用插电式和无线充电系统的多目标EVRP。他们将这个问题转化为MIP模型,并使用CPLEX有效地解决该问题。Zhen等人(2020年)提出了HEVRP的一个变种问题,考虑车辆可以在四种模式下运行。EVs只要具有电池电量或汽油就可以运行。然而,在本研究中,忽略了车辆载重对电力或汽油消耗的影响。这个问题需要决定在EVs的路线上要访问哪些加油站或充电站。汽油和电力的价格是已知的,每条边消耗的汽油和电量也是预先知道的。该问题隐含一个假设,即车辆行驶每条边只能选择一种模式。作者开发了一种改进的PSO算法来解决此问题,该算法混合了PSO和VNS程序,并使用一个标签程序为每条边分配一种模式。
7.2 电动dial-a-ride问题
如果dial-a-ride problem (DARP)使用EVs,并允许电动汽车在行驶过程中充电,那么就将该问题定义为EDARP。DARP包括为多个请求设计车辆路线,每个请求都有一个提货点(起点)、一个 交付 点(终点)和一定数量的需求。对于所有的请求,都存在一个最大的乘坐时间,即取货时间和送货时间的间隔必须在给定的限制内。关于DARP的全面介绍,读者可以参考Cordeau和Laporte(2007)、Molenbruch等人(2017)和Ho等人(2018)的文章。
Masmoudi等人(2018年)提出了EDARP,该问题特别适用于与非紧急转移患者相关的医疗服务。不同的病人需要被运送到他们的家和诊所(或医院)之间。在这个问题中,考虑了多种类型的EVs,每一种EV具有容量限制,且可以提供多种类型的资源。EDARP的目标是规划一组路径来满足所有请求,同时最小化总路径成本。EDARP可行解必须满足以下条件:1)转移点之前必须访问相应接收点;2)不能违背资源约束;3)服务每个顶点的开始时间必须在时间窗内;4)每个顾客的乘坐时间不能违反;5)每个请求必须被一个EV完成。为了解决这一问题,作者提出了三种进化VNS启发式算法,并将VNS启发式算法融合到遗传算法的框架中。此外,在他们的方法中还使用了打乱蛙跳算法(Eusuff et al., 2006)和蜜蜂算法的技术。Shi 等人(2018)也研究了拼车服务背景下的EDARP,并将问题转化为MIP模型。
Bongiovanni等人(2019) 考虑多个起止车辆中心对Masmoudi等人(2018)的工作进行扩展。每辆EV可以返回到一个候选终点车场,而不是返回到其起始车场。充电站只能为空电量的EV提供充电服务,且部分充电。作者将他们的问题表述为3-索引和2-索引的MIP模型,然后设计了一个分支切割算法,并在其中加入了基于问题结构的有效不等式。通过实验,他们发现求解2-索引模型比求解3-索引模型可以得到更好的结果。通过他们的方法可以得到包含5辆电动汽车和40个请求算例的最优解。AlKanj等人(2020年)研究了一个综合的叫车系统,该系统可以调度一个集中管理的自动EVs车队。他们使用近似动态规划算法来确定行程分配和充电操作。
7.3 电动二级车辆路径问题
二级配送系统在物流行业中很常见,因此需要对二级VRP(2EVRP)进行研究。在2EVRP中,货物首先由大型车辆从仓库运输到中间点 ( 称为卫星 ) ,然后由小型车辆从卫星分配给客户。在卫星上,货物需要从大型车辆转移到小型车辆。因此,我们需要同时处理两个VRPs,即将大型车辆从一个仓库行驶到一组卫星(即第一梯队车辆路径)和将小型车辆从一颗卫星行驶到一组客户(即第二梯队车辆路径)。关于2EVRP的更多资料,请参考Perboli等人(2011)、Baldacci等人(2013)和Jepsen等人(2013)的文章。当这个问题用EVs来运输货物时,我们可以得到一个称为E2EVRP的扩展变种问题。图10提供了一个E2EVRP传输网络的示例。

图10. E2EVRP运输网络实例
Breunig等人(2019)提出了一种仅在二级分配阶段使用EVs的E2EVRP。他们基于Baldacci et al.(2013)为2EVRP开发了一种精确算法来解决这个问题。通过实验分析,作者发现该精确算法只能得到中小规模算例的最优解。对于大规模算例,他们设计了一个LNS启发式来产生高质量的上界。Jie等人(2019)研究了一种两个梯级使用EVs的E2EVRP。他们使用一种称为CG - ALNS的混合启发式算法解决这个问题,该算法由一个列生成(CG)程序和一个ALNS启发式算法组成。CG处理的第一梯队的路径问题是一个分流交付EVRP。第二阶ALNS启发式算法所解决的路径问题可以看作是一个多车辆中心EVRP,假设卫星是车辆中心。作者含蓄地假设客户的需求是完整的,这可以从他们列生成的描述中得到。
7.4 带时间窗的电动同时取货和送货问题
带时间窗的同时取货和送货问题(PDPTW)已被众多学者广泛研究。在PDPTW中,需要满足n个运输请求。一个运输请求包括一个起点和一个终点。给定数量的商品从起点提货,然后运送到相应的目的地。每个操作都有一个服务时间,并且必须在给定的时间窗内开始。一组具有已知能力的相同车辆被派遣去满足这些要求。所有车辆都必须在车辆中心起止。如果我们用EVs代替CVs,那么PDPTW就变成了EPDPTW。Goeke(2019)引入了一种紧凑的带部分充电策略的EPDPTW,并开发一种称为颗粒禁忌搜索(GTS)的算法。GTS算法蕴含的想法并不新颖,该算法已经应用于求解其他几个VRPs,如Toth和Vigo(2003)和Escobar等人(2014)。在他们的算法中,当允许违反时间窗约束时,他们有效地处理了部分充电问题。文献中不存在任何基准方法。因此,作者将该算法应用于求解PDPTW,并将其结果与文献中5种最佳求解PDPTW的算法进行了比较。比较结果表明,GTS算法可以产生具有很强竞争力的解。
8 总结
我们展示了一个关于EVs路径问题的文献综述。所有的论文都是相应的车辆路径问题上进行的扩展。EVRPs可以采用两种充电策略,即全充电策略和部分充电策略。因此,每个问题可以有两个版本。部分充电策略更加灵活,同时增加了问题的复杂性和解决问题的难度。许多研究已经证明采用部分充电策略带来的好处。此外,许多论文将电池充电函数和能量消耗函数纳入其模型,使其问题更接近实际。在解决算法上,大部分工作继承了VRP的方法,并根据电动汽车的特性进行了一些修改。扩展问题进一步努力确定充电(或电池更换)站的位置和何时给EVs充电。
经过对这些论文的回顾,本文发现了几个明显的研究空白,如下所述:目前没有论文提供真正应用EVRPs模型和算法的实际工业案例。因此,我们不知道哪些公司采用了相关的方法,以及采用EVs可以降低的成本。文献中所处理的算例规模远远小于实际案例的规模,因为实际案例通常涉及数百辆电动汽车和数千名客户。适用于小规模算例的方法可能不适用于实际和大规模算例。我们没有发现任何现有的研究专注于设计算法来解决大规模算例。一些研究人员设计了强化学习算法来解决传统的VRP,而这些方法还没有解决EVRPs。共享汽车和在线叫车业务,如优步,已经在许多国家运营,并普遍使用EVs,目前还没有任何文章以该背景为研究内容。里程焦虑是指担心一辆车的里程不足以到达目的地,不确定的环境和任务极大地加剧了距离焦虑。在环境不确定和客户需求不确定情况下,相关解决方法的研究较少。
关于EVRP的文献还不广泛,因此,更多的研究者可以在这一领域做出贡献。四个有前景的研究可供进一步探索。首先,在模型中,我们可以考虑移动充电站,从而使交通更加灵活。其次,几乎所有VRPs都可以通过将CVs替换为EVs来升级。因此,我们可以尝试将其他VRP变种问题扩展到它们的电动版本。再次,我们从文献中发现,关于精确算法的研究是稀缺的,需要更多的研究人员来设计求解问题最优解的方法。最后,随着无人驾驶汽车和5G时代的到来,可以提出和研究与EVs路径相关的其他问题、模型和算法。