2023年上海车展期间,觉非科技基于BEV的数据闭环融合智能驾驶解决方案正式发布。
该方案可通过量产车BEV的实时感知结果,提供完整的城市Map-lite及Map-free数据闭环融合解决方案,并满足城市NOA、记忆通勤/泊车以及感知大模型训练的需要。
车展期间,觉非科技同国内知名主机厂及Tier1达成合作,在2024年量产车上实现该方案的规模化落地。
 觉非科技:基于BEV的数据闭环融合智驾解决方案
觉非科技:基于BEV的数据闭环融合智驾解决方案

觉非科技创始人刘斌为中国科学技术协会主席万钢讲解方案
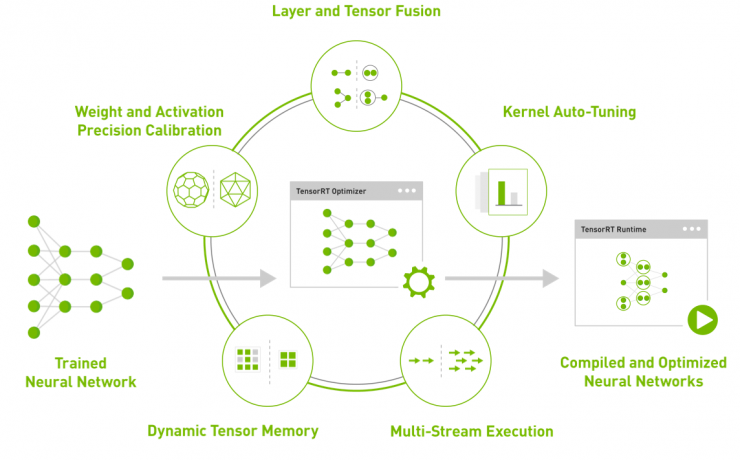
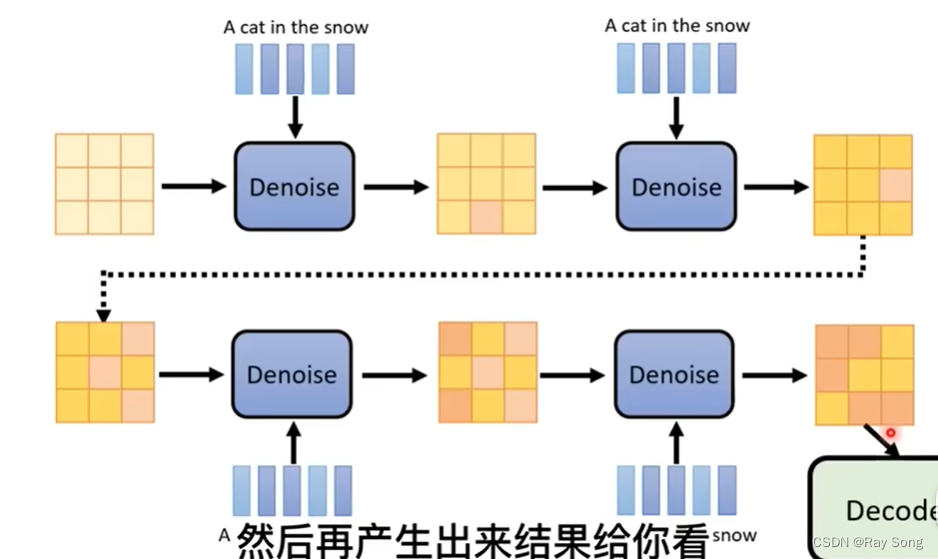
基于Transformer的BEV智驾大模型是产业全新的感知范式,也为自动驾驶在融合感知、跟踪预测和规划控制等技术的发展带来了更大的拓展空间,目前不仅是学术界追捧的热点,更被认为是解决城市NOA对高精地图过度依赖的可达路径。
其优势在于可以使用实时感知和以“脑补方式”输出局部地图,并直接进行决策规划,一定程度上可以解决先验高精地图覆盖和现实性的问题。
BEV感知的特征提取,主要依靠神经网络模型,这意味着要有足够的高质量数据,才能积累出一个强大的模型。
觉非科技以“数据闭环”为技术发展路径,通过长期的车端与路侧技术实践,积累了大量覆盖不同场景的自动驾驶数据集,并结合机器学习等方式,转化成为了“数据服务平台”。
在面对道路数据方面,觉非科技的观点是,数据需要在合法合规的情况下,基于量产车形成的新的形态,用以支撑感知大模型的规模化数据集。
 基于量产车BEV实时感知
基于量产车BEV实时感知
 SLAM建图
SLAM建图
目前产业中对高精地图数据持不同思路。觉非科技认为:中国的城市道路样本复杂度是独一无二的,NOA落地城市的路线选择,关键在于效果和性价比。
做到日更的低成本地图数据,不仅可以作为先验知识,在复杂城市场景中提供更长距离的道路信息,更可以同感知模型协同,解决异型路口的Corner Case,大大提升城市自动驾驶的安全及舒适性。
觉非的BEV的数据闭环智能融合驾驶解决方案,全部基于量产车BEV的实时感知结果实现,拥有完整的数据闭环解决方案和能力,可满足城市NOA、记忆通勤/泊车和大模型训练的需要。
方案同时支持Map-lite与Map-free两种技术路径,在满足城市NOA安全与成本的双重诉求时,也提供更加安全、可靠、自由灵活的应用空间。
觉非科技CEO李东旻表示:在“软件定义汽车”时代,觉非科技从未停下探索的脚步。我们致力于通过“感知-决策-数据”的闭环能力赋能智能驾驶。对比传统的辅助驾驶解决方案,觉非基于BEV的数据闭环融合智驾方案拥有更先进的算法框架、更灵活的应用空间与更开放的合作形式。我们相信,方案的量产落地将为产业市场开拓出新的增长空间,期待携手更多生态伙伴,共同谱写“软件定义汽车”时代的新篇章。
关于觉非科技:觉非科技是国内领先的自动驾驶感知决策算法与数据服务商,以“多传感器融合计算”为核心技术路线,围绕乘用车出行、干线物流和城市末端三大应用场景,提供跨场景、跨平台、跨终端的智能驾驶解决方案,实现了国内产业领域中少有的“三跨”服务能力。觉非的融合感知系统目前已覆盖车端与路端,构建了适用于全栈自动驾驶的具备“感知-决策-数据”闭环能力的量产方案,以“数据驱动量产化”为核心业务目标,为合作伙伴实现自动驾驶闭环能力。