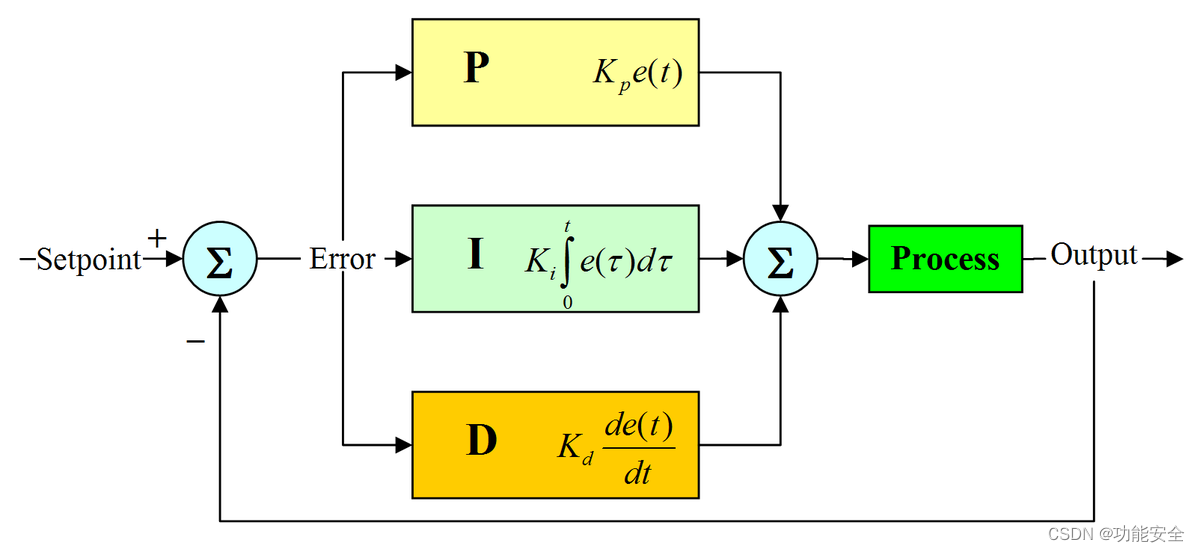
PID控制器(比例-积分-微分控制器),由比例单元(P)、积分单元(I)和微分单元(D)组成。
可以通过调整这三个单元的增益Kp,Ki和Kd来调定其特性,PID控制器主要适用于基本上线性,且动态特性不随时间变化的系统。
一、基础理论
PID是以它的三种纠正算法而命名。受控变数是三种算法(比例、积分、微分)相加后的结果,即为其输出,其输入为误差值(设定值减去测量值后的结果)或是由误差值衍生的信号。若定义 {displaystyle u(t)} u(t)为控制输出,PID算法可以用下式表示:

其中
Kp:比例增益,是调适参数
Ki:积分增益,也是调适参数
Kd:微分增益,也是调适参数
e:误差=设定值(SP)- 回授值(PV)
t:目前时间
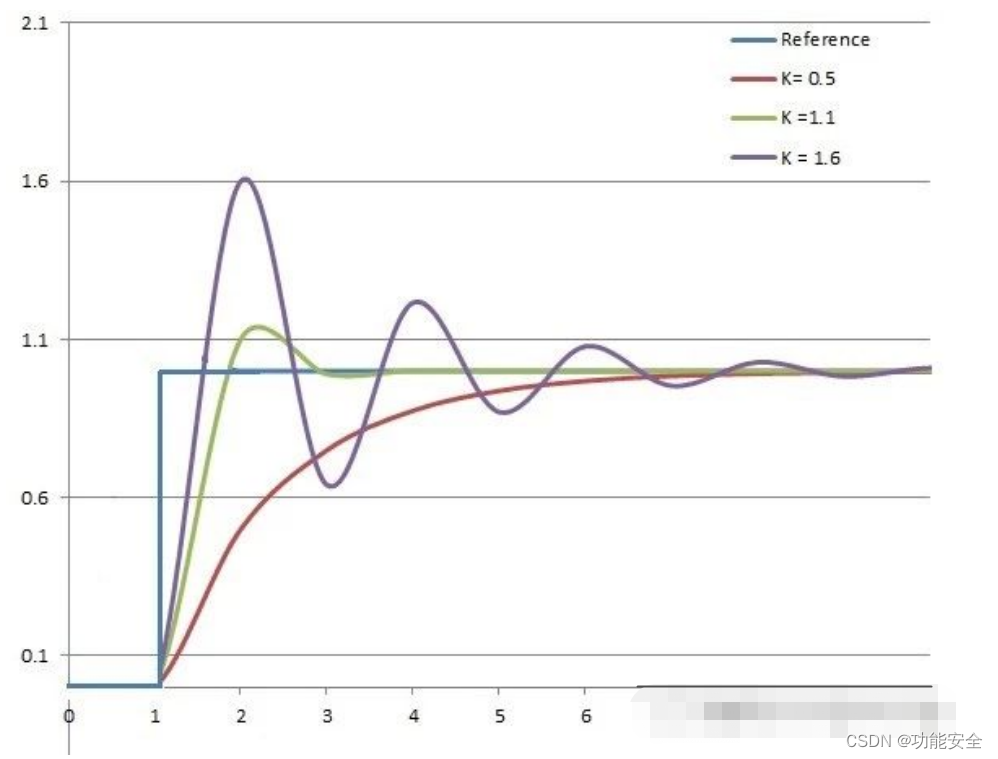
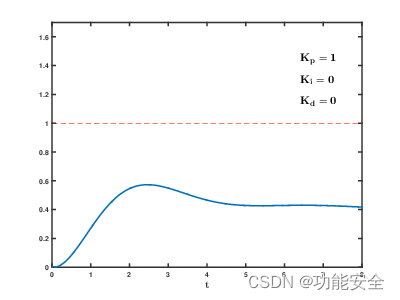
1.比例控件
比例控制考虑当前误差,误差值和一个正值的常数Kp(表示比例)相乘。
如下图,不同比例增益Kp下,受控变数对时间的变化(Ki和Kd维持定值):
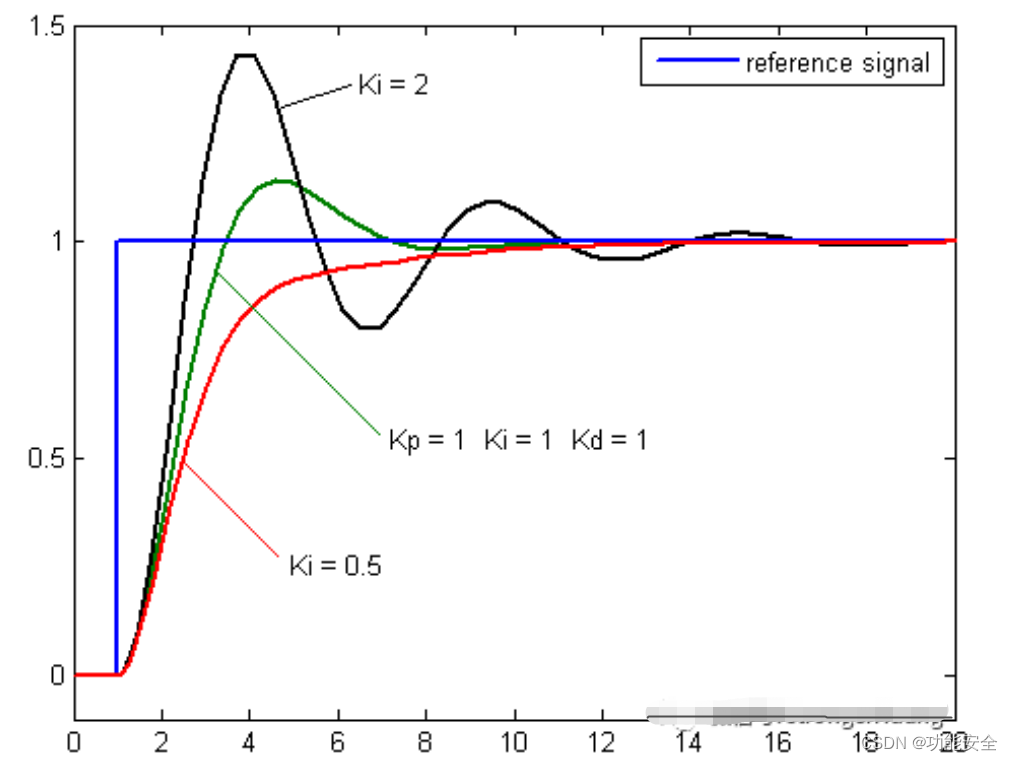
2.积分控件
积分控制考虑过去误差,将误差值过去一段时间和(误差和)乘以一个正值的常数Ki。
如下图,不同积分增益Ki下,受控变数对时间的变化(Kp和Kd维持定值):
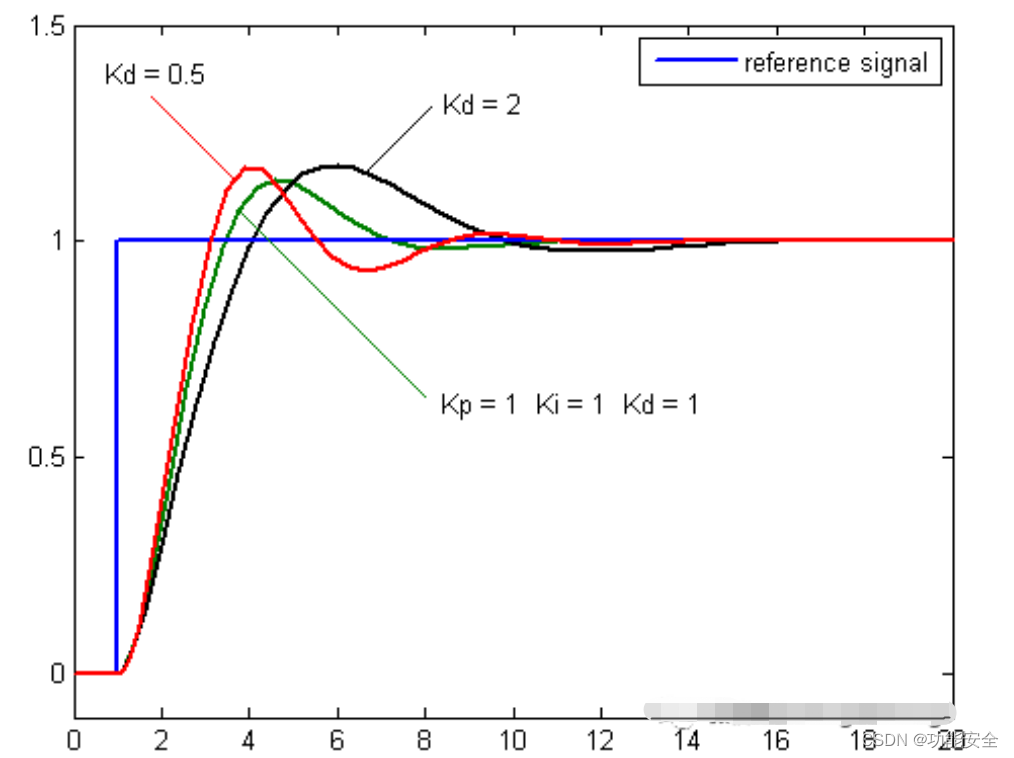
3.微分控件
微分控制考虑将来误差,计算误差的一阶导,并和一个正值的常数Kd相乘。
如下图,不同微分增益Kd下,受控变数对时间的变化(Kp和Ki维持定值):
二、参数调试
PID的参数调试是指通过调整控制参数(比例增益、积分增益/时间、微分增益/时间)让系统达到最佳的控制效果。
稳定性(不会有发散性的震荡)是首要条件,此外,不同系统有不同的行为,不同的应用其需求也不同,而且这些需求还可能会互相冲突。
PID只有三个参数,在原理上容易说明,但PID参数调试是一个困难的工作,因为要符合一些特别的判据,而且PID控制有其限制存在。历史上有许多不同的PID参数调试方式,包括齐格勒-尼科尔斯方法等,其中也有一些已申请专利。
1.稳定性
若PID控制器的参数未挑选妥当,其控制器输出可能是不稳定的,也就是其输出发散,过程中可能有震荡,也可能没有震荡,且其输出只受饱和或是机械损坏等原因所限制。不稳定一般是因为过大增益造成,特别是针对延迟时间很长的系统。
2.最佳性能
PID控制器的最佳性能可能和针对过程变化或是设定值变化有关,也会随应用而不同。
两个基本的需求是调整能力(regulation,干扰拒绝,使系统维持在设定值)及命令追随 (设定值变化下,控制器输出追随设定值的反应速度)。有关命令追随的一些判据包括有上升时间及整定时间。有些应用可能因为安全考量,不允许输出超过设定值,也有些应用要求在到达设定值过程中的能量可以最小化。
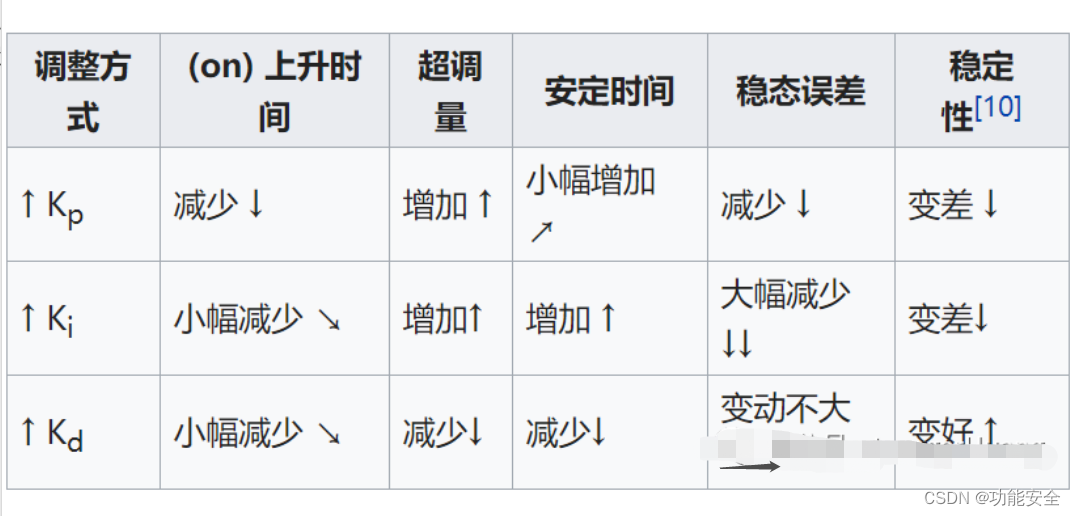
3.调整PID参数对系统的影响



![[pgrx开发postgresql数据库扩展]3.hello world全流程解析](https://img-blog.csdnimg.cn/img_convert/cc692a6dd100f34e4abbf8835f70d9a0.webp?x-oss-process=image/format,png)