Baumer工业相机堡盟工业相机如何通过BGAPISDK的软触发实现两相机的同步采集(C#)
- Baumer工业相机
- Baumer工业相机的高速同步采集的技术背景
- Baumer工业相机通过BGAPI SDK在回调函数里同步保存图像
- 工业相机在回调函数BufferEvent保存
- 工业相机使用软触发进行同步采集
- 工业相机的软件触发命令函数
- Baumer工业相机的软件触发同步采集测试图
- Baumer工业相机的高速同步采集功能的优势
- Baumer工业相机的高速同步采集功能的行业应用
Baumer工业相机
Baumer工业相机堡盟相机是一种高性能、高质量的工业相机,可用于各种应用场景,如物体检测、计数和识别、运动分析和图像处理。
Baumer的万兆网相机拥有出色的图像处理性能,可以实时传输高分辨率图像。此外,该相机还具有快速数据传输、低功耗、易于集成以及高度可扩展性等特点。
Baumer工业相机由于其性能和质量的优越和稳定,常用于高速同步采集领域。
Baumer工业相机的高速同步采集的技术背景
多个工业相机的高速同步采集是一个技术过程,涉及到从多个相机高速采集图像,并将其整合到一个同步系统中。这个过程需要先进的硬件和软件技术,以及对摄像机同步、数据传输和图像处理的理解。
为了实现多个工业相机的高速同步采集,有必要使用支持硬件触发并可通过先进软件进行同步的相机。例如,可以使用主时钟信号或脉冲发生器来触发摄像机,以确保所有摄像机在完全相同的时刻捕获图像。
此外,还需要一个高速数据传输网络,以确保每个摄像机捕获的大量图像数据能够快速传输到中央处理单元(CPU)进行进一步分析。这通常涉及使用高速通信协议,如千兆以太网或CoaXPress。
在图像处理方面,需要专门的软件来处理由多个摄像机产生的大量数据。这可能包括实时视频处理算法、运动检测、模式识别或其他先进技术,旨在从捕获的图像中提取有用信息。
总的来说,实现多个工业相机的高速同步采集是一项复杂的技术任务,需要多个学科的专业知识,包括硬件设计、软件开发和图像处理。
本文这里只简单介绍Baumer的两个工业相机在设置相同参数时,使用软触发进行的同步采集
Baumer工业相机通过BGAPI SDK在回调函数里同步保存图像
下面介绍在C#里两个Baumer工业相机在软触发的情况下进行同步采集
工业相机在回调函数BufferEvent保存
在回调函数里保存图像,使用毫秒级的时间戳去存储图像的名称,C#调用代码如下所示:
static void ds_NewBufferEvent(object sender, BGAPI2.Events.NewBufferEventArgs mDSEvent)
{
try
{
BGAPI2.Buffer mBufferFilled = null;
//System.Drawing.Bitmap pBitmap = null;
//Byte[] pImgBits;
mBufferFilled = mDSEvent.BufferObj;
if (mBufferFilled == null)
{
MessageBox.Show("Error: Buffer Timeout after 1000 ms!");
}
else if (mBufferFilled.IsIncomplete == true)
{
//MessageBox.Show("Error: Image is incomplete!");
// queue buffer again
mBufferFilled.QueueBuffer();
}
else
{
//System.Console.Write(" Image {0, 5:d} received in memory address {1:X}\n", mBufferFilled.FrameID, (ulong)mBufferFilled.MemPtr);
IntPtr imagebuffer = new IntPtr();
//imagebuffer = mBufferFilled.MemPtr;
BGAPI2.Image pImage = actform.pImgProcessor.CreateImage((uint)mBufferFilled.Width, (uint)mBufferFilled.Height, mBufferFilled.PixelFormat, mBufferFilled.MemPtr, mBufferFilled.MemSize);
BGAPI2.Image pTranImage = null;
pTranImage = actform.pImgProcessor.CreateTransformedImage(pImage, "BGR8");//新2.9.2代码不同点
int w = 0;
int h = 0;
w = (int)pTranImage.Width;
h = (int)pTranImage.Height;
imagebuffer = pTranImage.Buffer;
//Now you have the Imagebuffer and can do everything with it you want
if (actform.bFirstFrame)
{
actform.pImgBits = new Byte[w * h * 3];
//actform.pBitmap = new Bitmap(w,h,PixelFormat.Format8bppIndexed);
//pBitmap = new System.Drawing.Bitmap(w,h,System.Drawing.Imaging.PixelFormat.Format8bppIndexed);
actform.pBitmap = new System.Drawing.Bitmap(w, h, System.Drawing.Imaging.PixelFormat.Format24bppRgb);
actform.prcSource.X = 0;
actform.prcSource.Y = 0;
actform.prcSource.Width = w;
actform.prcSource.Height = h;
actform.bFirstFrame = false;
}
System.Drawing.Imaging.BitmapData bmpdata;
bmpdata = actform.pBitmap.LockBits(actform.prcSource, System.Drawing.Imaging.ImageLockMode.WriteOnly, System.Drawing.Imaging.PixelFormat.Format24bppRgb);
System.Runtime.InteropServices.Marshal.Copy(imagebuffer, actform.pImgBits, 0, w * h * 3);
System.Runtime.InteropServices.Marshal.Copy(actform.pImgBits, 0, bmpdata.Scan0, w * h * 3);
actform.pBitmap.UnlockBits(bmpdata);
System.Drawing.Graphics graph = System.Drawing.Graphics.FromHwnd(actform.pictureBox1.Handle);
graph.DrawImage(actform.pBitmap, actform.prcPBox, actform.prcSource, GraphicsUnit.Pixel);
String strPath;
String strtime;
strtime = DateTime.Now.ToString("yyyyMMddhhmmssfff");
string Mode = actform.lisDev[0].Model;
string SN = actform.lisDev[0].SerialNumber;
//string configpath = AppDomain.CurrentDomain.BaseDirectory + "config.ini";
//string pImgFileDirstr = AppDomain.CurrentDomain.BaseDirectory;
//pImgFileDirstr = WinAPI.ProfileReadValue("Setting", "SaveImagePath0", configpath);
//string FixedStringstr = "";
//FixedStringstr = WinAPI.ProfileReadValue("Setting", "FixedString0", configpath);
string pImgFileDirstr1 = actform.pImgFileDirstr;
string FixedStringstr1 = actform.FixedStringstr;
#region//获取当前FrameID
int FrameIDInt = (int)mBufferFilled.FrameID;
#endregion
if (1==1)
{
//使用毫秒级名称保存图像
String strtime2 = DateTime.Now.ToString("fff");
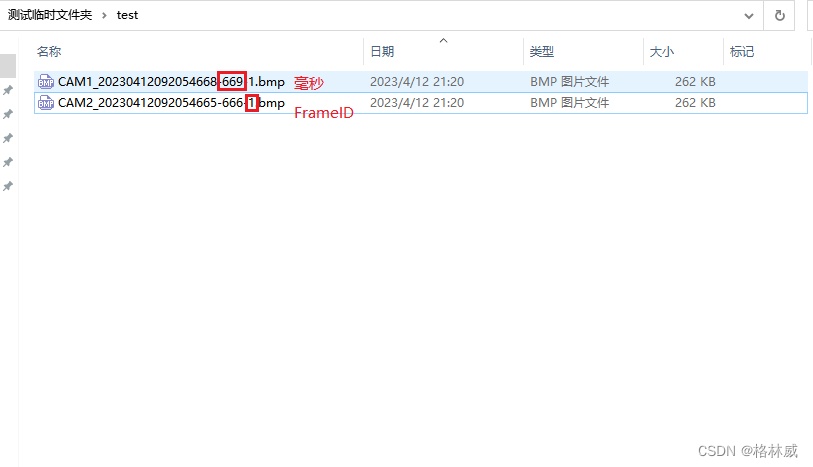
strPath = pImgFileDirstr1 + "\\" + Mode + "_" + SN + "_" + strtime + "-" + strtime2 + "-" + FrameIDInt + ".bmp";
strPath = pImgFileDirstr1 + "\\" + FixedStringstr1 + "_" + strtime + "-" + strtime2 + "-" + FrameIDInt + ".bmp";
actform.pBitmap.Save(strPath);
}
//queue buffer again
pImage.Release();
pTranImage.Release();
//imagebuffer.
mBufferFilled.QueueBuffer();
}
}
catch (BGAPI2.Exceptions.IException ex)
{
string str2;
str2 = string.Format("ExceptionType:{0}! ErrorDescription:{1} in function:{2}", ex.GetType(), ex.GetErrorDescription(), ex.GetFunctionName());
MessageBox.Show(str2);
}
}
工业相机使用软触发进行同步采集
使用软件触发进行同步采集,C#调用代码如下所示:
private void button2_Click(object sender, EventArgs e)
{
if (lisDev.Count ==2)
{
fullsavebmp1 = true; fullsavebmp2 = true;
if ((lisDev[0].RemoteNodeList["TriggerSource"].Value.ToString() == "Software"
|| lisDev[0].RemoteNodeList["TriggerSource"].Value.ToString() == "SoftwareTrigger")
&& (lisDev[1].RemoteNodeList["TriggerSource"].Value.ToString() == "Software"
|| lisDev[1].RemoteNodeList["TriggerSource"].Value.ToString() == "SoftwareTrigger"))
{
int count1 = 0;
BGAPI2.Device dev1 = lisDev[0];
BGAPI2.Device dev2 = lisDev[1];
Thread AutoTriggerSoftwareThread1 = new Thread((ThreadStart)delegate() { AutoTriggerSoftwareRun1(dev1); });
AutoTriggerSoftwareThread1.Start();
Thread AutoTriggerSoftwareThread2 = new Thread((ThreadStart)delegate() { AutoTriggerSoftwareRun1(dev2); });
AutoTriggerSoftwareThread2.Start();
}
//fullsavebmp1 = false; fullsavebmp2 = false;
}
if (lisDev.Count == 1)
{
if ((lisDev[0].RemoteNodeList["TriggerSource"].Value.ToString() == "Software"
|| lisDev[0].RemoteNodeList["TriggerSource"].Value.ToString() == "SoftwareTrigger"))
{
foreach (BGAPI2.Device dev in lisDev)
{
dev.RemoteNodeList["TriggerSoftware"].Execute();
}
}
}
}
工业相机的软件触发命令函数
工业相机软件触发命令,C#调用代码如下所示:
private void AutoTriggerSoftwareRun1(BGAPI2.Device dev)
{
dev.RemoteNodeList["TriggerSoftware"].Execute();
}
private void AutoTriggerSoftwareRun2(BGAPI2.Device dev)
{
dev.RemoteNodeList["TriggerSoftware"].Execute();
}
Baumer工业相机的软件触发同步采集测试图
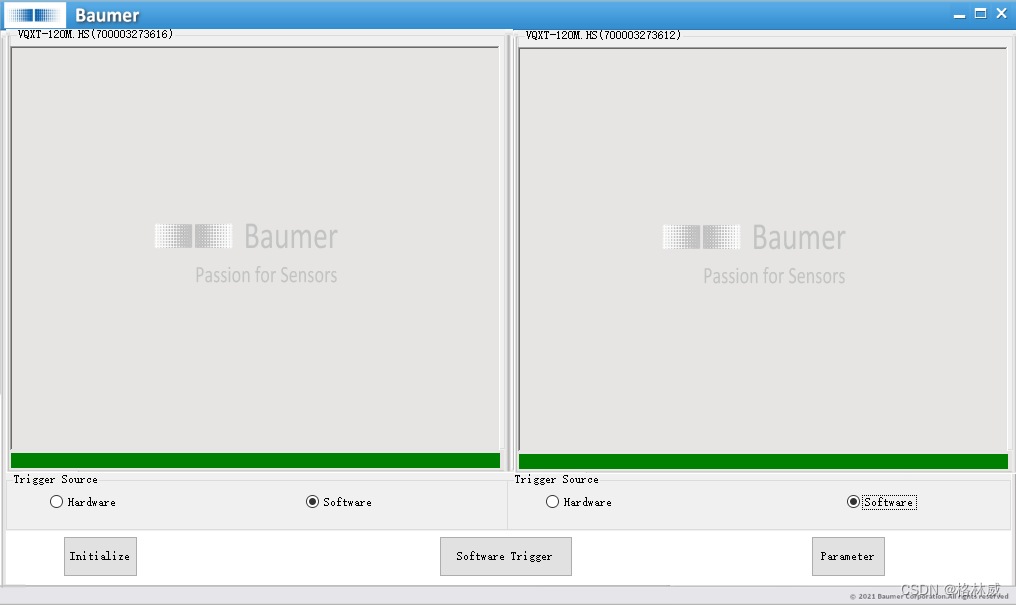
使用软件触发同步采集后保存的图像名称如下所示:
Baumer工业相机的高速同步采集功能的优势
-
高速同步采集: 堡盟工业相机具有高速同步采集功能,可以同时采集多个图像。这使它们成为时间至关重要的应用的理想选择,例如在机器视觉、机器人和自动化领域。
-
提高精度和准确度: 堡盟工业相机的高速同步采集使图像数据的准确性和精确性得到提高。这在需要进行高精确度测量的应用中尤为重要。
-
提高生产力: 堡盟工业相机具有一次采集多幅图像的能力,有助于提高制造业和其他工业流程的生产率。它们可以帮助实时识别错误和低效率,以便立即采取纠正措施。
-
定制化: 堡盟工业相机可进行定制,以满足不同应用的具体需求。它们提供各种选项,包括分辨率、帧率和动态范围。
-
耐用性: 堡盟工业相机的设计能够承受恶劣的环境,并且经久耐用。它们能抵抗冲击和振动,并能在极端温度下工作,使它们适合在工业和制造业环境中使用。
Baumer工业相机的高速同步采集功能的行业应用
-
汽车行业: 在汽车行业,高速相机被用来捕捉移动物体的图像,如车辆、行人和骑自行车的人。这些数据被用于各种应用,包括避免碰撞系统、高级驾驶辅助系统和自动停车系统。
-
制造行业: 在制造业中,高速相机被用来监测装配线和流程,检查缺陷,并确保质量控制。它们还被用来捕捉快速移动的机器和设备的图像,用于维护和排除故障。
-
制药业: 在制药业,高速相机被用来捕捉药物开发和测试过程的图像,包括分析液体、气溶胶和悬浮液中颗粒的行为。
-
体育行业: 在体育行业,高速相机被用来捕捉运动员运动中的图像,使教练和训练员能够分析技术并作出调整,以达到最佳表现。
-
航空航天工业: 在航天工业中,高速相机被用来捕捉飞机在测试和开发过程中的图像,包括分析风洞测试和高速飞行。
这些只是多工业相机的高速同步采集功能的几个行业应用。该技术在各行业还有很多应用。



![[RoarCTF 2019]Easy Calc、攻防世界 ics07、[极客大挑战 2019]EasySQL](https://img-blog.csdnimg.cn/19b985e34bab40f59d2e89eaa21ffc99.png)