# 导读 #
CopterSim作为RflySim平台核心仿真软件,其主要实现两部分功能:模型和通信,掌握CopterSim使用方法即可轻松运行多旋翼运动动态模型,并连同其他软件构成软/硬件在环仿真。本篇教程将详细介绍coptersim仿真log数据获取。
Coptersim系列教程(三)
4.1实验目的
在进行仿真时,获取载具运动数据以便后续处理。
4.2实验原理
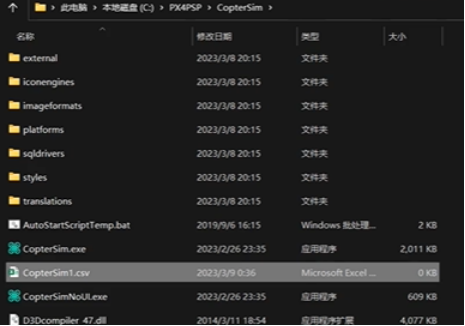
仿真真值数据的离线获取方法,对于第i号飞机,只需要在PX4PSP\CopterSim下新建一个CopterSim+i+.csv的文件(例如,CopterSim1.csv ),然后每次仿真后会记录仿真真值数据(同RflySim3D接收数据,包含了位置、速度、电机转速等信息)
4.3实验准备
在“PX4PSP\CopterSim”文件夹下新建三个空白的“CopterSim1.csv”, “CopterSim2.csv”和“CopterSim3.csv”文档文件。(注:新建与所需飞机id对应的.csv)。
4.4实验步骤
01
步骤1.开始仿真并记录数据
双击SITLRun,并输入3,创建三个飞机,可以在coptersim看到飞机的id(显示区和“udp收端口”),然后在QGC内进行起飞、前飞、降落等操作(CopterSim上的“开始仿真”按钮按下,就会开始记录数据,也可在RflySim3D中按下键盘的“D”键,实时显示当前飞机数据),再在cmd窗口结束仿真关闭所有程序,关闭之后打开文件coptersim的安装目录,可以看到刚才新建的三个文件大小已经刷新。
4.4实验步骤
01
步骤1.开始仿真并记录数据
双击SITLRun,并输入3,创建三个飞机,可以在coptersim看到飞机的id(显示区和“udp收端口”),然后在QGC内进行起飞、前飞、降落等操作(CopterSim上的“开始仿真”按钮按下,就会开始记录数据,也可在RflySim3D中按下键盘的“D”键,实时显示当前飞机数据),再在cmd窗口结束仿真关闭所有程序,关闭之后打开文件coptersim的安装目录,可以看到刚才新建的三个文件大小已经刷新。

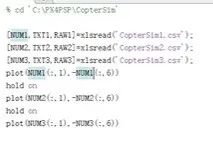
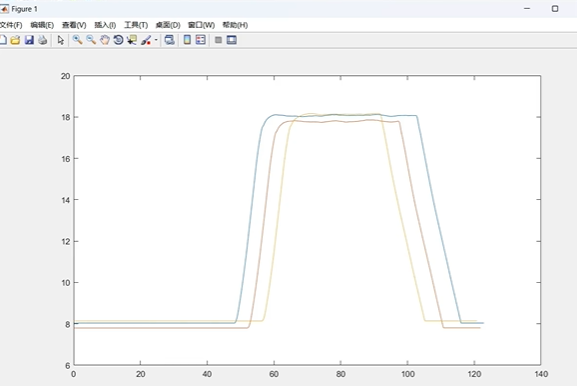
步骤2.利用matlab分析数据
把 Matlab 的工作目录设置到coptersim的安装目录,可以利用xlsread函数直接读取csv文件里面的数据。在MATLAB中可以直接进行数据处理,例如plot画出飞机1~3的时间(x轴)高度(y轴)图。