DP动态规划之-滚动数组
- 前言
在学习 不同路径II 的动态规划过程中,从介绍资料中了解到 滚动数组可以进一步降低动态规划解空间的复杂度,更高效利用计算机的储存空间。动态规划中的滚动数组究竟能发挥哪些作用,在常规的动态规划中,我们又是如何进行具体的应用呢?
从本质上理解,滚动数组的作用就是为了更好利用储存空间,用有限的空间不断进行覆盖,从而完成整体算法任务,具体而言分为两类:
- 一维数组简化为2个或3个变量
- 二维数组简化为1维数组
- 一维数组转化为滚动数组
具体看一个斐波那契数列的例子,中规中矩的动态规划数组一般设定为dp[n+1],其中n表示斐波那契数列的下标(位置),通过dp[n]=dp[n-1]+dp[n-2]求解出所有的斐波那契数列。
动态规划的基础解为dp[1]=1, dp[2]=1,然后通过循环求出每个位置上的斐波那契数字,最后返回dp[n]即为所求得的具体解。
int fib_normal_array(int n)
{
int i;
int dp[n+1];
dp[1]=1;
dp[2]=1;
for(i=3;i<=n;i++)
{
dp[i]=dp[i-1]+dp[i-2];
}
return dp[n];
}
那么如何转化为滚动数组呢? 通过观察我们发现,对于每个位置上的斐波那契数字,它仅仅与前面两个相邻的斐波那契数字相关,再往前的斐波那契数字与它无关。这就给我们些微的思路,尝试探索用3个单独变量来滚动实现斐波那契数字的求解。假定f1,f2和f3为连续的三个斐波那契数字,f3=f1+f2, 接下来把f2赋值给f1, f3赋值给f2,神奇的事情就会发生,让我们看具体的代码实现。
int fib_scrolling_array(int n)
{
int i;
int f1;
int f2;
int f3;
f1=1;
f2=1;
for(i=3;i<=n;i++)
{
f3=f1+f2;
f1=f2;
f2=f3;
}
return f3;
}
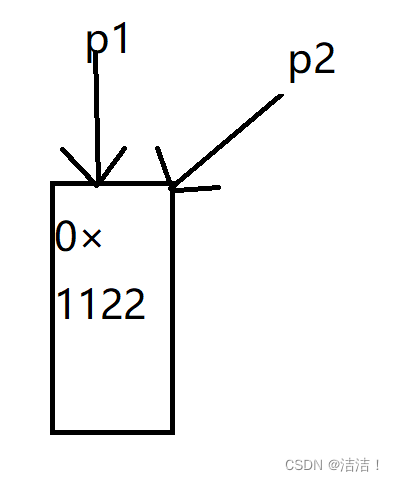
用图来进一步解释说明,可以观察出,f2和f3不断滚动到f1和f2, 周而复始,最终求得f3具体值,由于新值与旧值不断交换,形象称之为滚动。

上述例子可以看出,通过合理的变量设定,可以把占用空间从n降低为3个变量,但是工程问题永远都有两面性,减少了储存空间,那么如果要查找,就只能找到至多三个斐波那契数字,如果设定的一维数组,那么就可以通过下标任意查询。具体采用哪种模式,需要根据具体问题具体分析。
- 二维数组简化为一维数组
很多情况下,动态规划问题的求解有赖于DP二维数组,通过dp[i][j]与前面已知求得的解进行关联求和或求布尔运算,从而求出dp[i][j]的具体值。
看一个具体例子,前面曾经提到的 不同路径II的问题,常规情况下,利用二维DP数组进行求解,如果采用滚动数组的概念,则可以把二维数组优化为一维数组,如果进一步深入理解,也就是把二维数组的n×m个变量空间优化为m个变量空间,从形式上直观理解,二维数组自然退化为一维数组。
先给出 不同路径II的问题描述,问题引用自leetcode.
一个机器人位于一个
m x n网格的左上角 (起始点在下图中标记为 “Start” )。机器人每次只能向下或者向右移动一步。机器人试图达到网格的右下角(在下图中标记为 “Finish”)。现在考虑网格中有障碍物。那么从左上角到右下角将会有多少条不同的路径?网格中的障碍物和空位置分别用1和0来表示。

这个问题可以称之为条件式的动态规划问题,这源于障碍物的限制,障碍物限制会导致递归模式中的剪枝情况出现,本问题采用DP迭代动态规划,它会通过判断语句,对不同的dp[i]][j]进行赋值。
动态规划的重要特征是通过最优化子问题定义状态转移方程,可以理解为先定义最优化子问题,然后通过定义的子问题递归或迭代求出原问题的解。
对于此问题,题目要求求解最终不同路径的数目,同时限制了路径的走向,对于任意一个坐标点f(i,j),如果需要求出到达此点的路径的总数目,可以分两种情况:
- 情况1,如果此处存在路障,那么f(i,j)=0, 用编程语言描述,如果路障数组在某处obstacleGrid[i][j]的值为1,那么这个点和之前任何点都没有关系,到达此处的路径总数为0
- 情况2, 如果此处畅通无阻,这是可以把(i,j)看作是路径的终点,显而易见,f(i,j)和它相邻的做单元格和上单元格相关,进一步观察,实际上f(i,j)的路径总数取决于f(i-1,j) 和f(i,j-1)的数量之和,我们可以称作f(i-1,j)和f(i,j-1)为f(i,j)的子问题
从上面分析可以看出,采用动态规划最简单的方法就是定义一套二维数组,数组的坐标位置代表机器人所需要到达的目标位置,数组的值来储存到达此处的不同路径总数目。
对于DP值,需要找到它的基础值,也就是DAG路径当中的终点值。

对于第一行或第一列的障碍物数组,只要碰到出现障碍物,那么障碍物之后的不同路径总数目都为0,具体看实际例子,比如obstacle_grid[0][2]=1,那么它(包括本身)之后的在第一行中的DP数组的值(路径数目)都为0。同理对于obstacle_gride[0][3]的值为1(障碍物),那么它(包括本身)之后的所有第一列当中的DP数组的值均为0.

int unique_path(int **obstacle_grid, int row, int col)
{
int i; //row index
int j; //column index
int dp[row][col];
memset(dp,0,sizeof(dp));
dp[0][0]=(obstacle_grid[0][0]==0);
for(i=1;i<row;i++)
{
dp[i][0]=dp[i-1][0] && !(obstacle_grid[i][0]);
}
for(j=1;j<col;j++)
{
dp[0][j]=dp[0][j-1] && !(obstacle_grid[0][j]);
}
for(i=1;i<row;i++)
{
for(j=1;j<col;j++)
{
if(obstacle_grid[i][j]==0)
{
dp[i][j]=dp[i-1][j]+dp[i][j-1];
}
else
{
dp[i][j]=0; //depends on the current node isntead of previous node
}
}
}
return dp[row-1][col-1];
}
void create_obstacle(int ***obstacle_grid, int row, int col)
{
int i;
int j;
*obstacle_grid=(int **)malloc(sizeof(int *)*row);
for(i=0;i<row;i++)
{
*(*obstacle_grid+i)=(int *)malloc(sizeof(int)*col);
memset(*(*obstacle_grid + i),0,sizeof(int)*col);
}
//(*obstacle_grid)[1][1]=1
return;
}
#endif
大家如果仔细观察,可以发现,如果当前位置上没有路障,那么DP储存的不同路径数目仅和其紧邻左侧和上侧值有关,这时候最朴素的理解是不是可以采用dp[m][2]来储存数据呢? 答案当然是可行的,用两行一维数组来储存,并且交替更新数据,可以得到所求的结果,没有任何问题。
再进一步深度思考,能否采用一维数组实现算法呢? 答案也是肯定的,只不过需要用图示来说明一下它的实际来历。假定要计算新的DP[3]值,那么如何从同一行中的数值进行计算呢,实际上很简单DP[3]=DP[3](原有的值,相当于上侧)+DP[2](原有的值,相当于左侧),通过在同一行数组中的“滚动”更新,从而求得答案。

具体代码实现:
int unique_path(int **obstacle_grid, int row, int col)
{
//using the scrolling array/list
int dp[col];
int i;
int j;
memset(dp,0,sizeof(dp)); //need set the initial value as zero
dp[0]=(obstacle_grid[0][0]==0);
for(i=0;i<row;i++)
{
for(j=0;j<col;j++)
{
if(obstacle_grid[i][j]==1)
{
dp[j]=0;
}
else if((j-1)>=0 && obstacle_grid[i][j]==0)
{
dp[j]=dp[j]+dp[j-1];
}
}
}
return dp[col-1];
}
那么我们再进一步深入思考此问题,因为过程中实际上仅仅三个变量相关,那么能否采用与Fibonacci相同的3个变量实现方式呢?我们把答案留给读者思考,在此不再赘述。
- 小结
通过斐波那契和不同路径II问题的分析,勾勒出滚动数组两种常见的优化方式,其主要从时间复杂度上降低DP所占用的具体储存空间。由于其实现过程类似于“滚动”过程,我们形象称之为滚动数组。滚动数组实际上不止在动态规划中有应用,在线性链表遍历中,也可以采用类似概念,实现空间复杂度的降低。
参考资料:
63. 不同路径 II - 力扣(Leetcode)