目录
一、计算机常用通信方式
二、串口通信UART ·
三、串口通信寄存器
(1)串行口1控制寄存器SCON和PCON
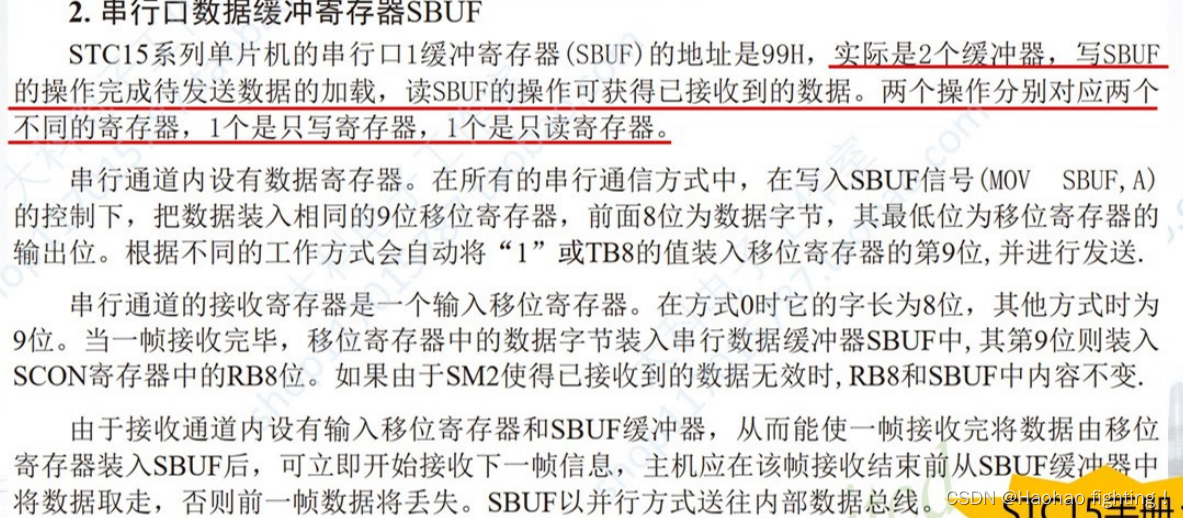
(2)串行口1数据缓冲器SBUF
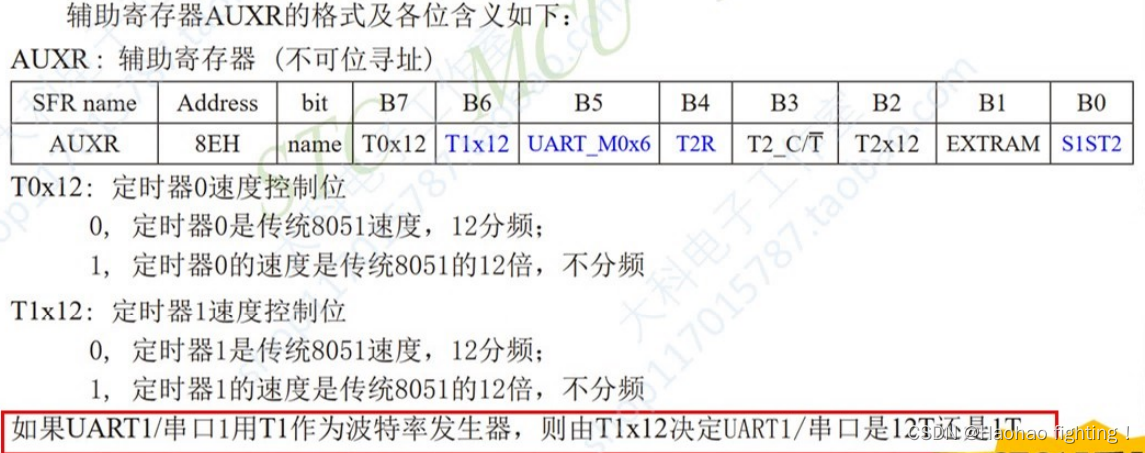
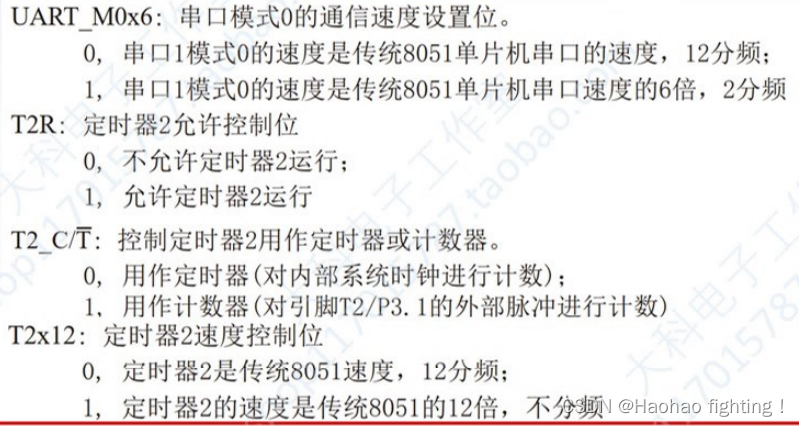
(3)串行口1辅助寄存器AUXR
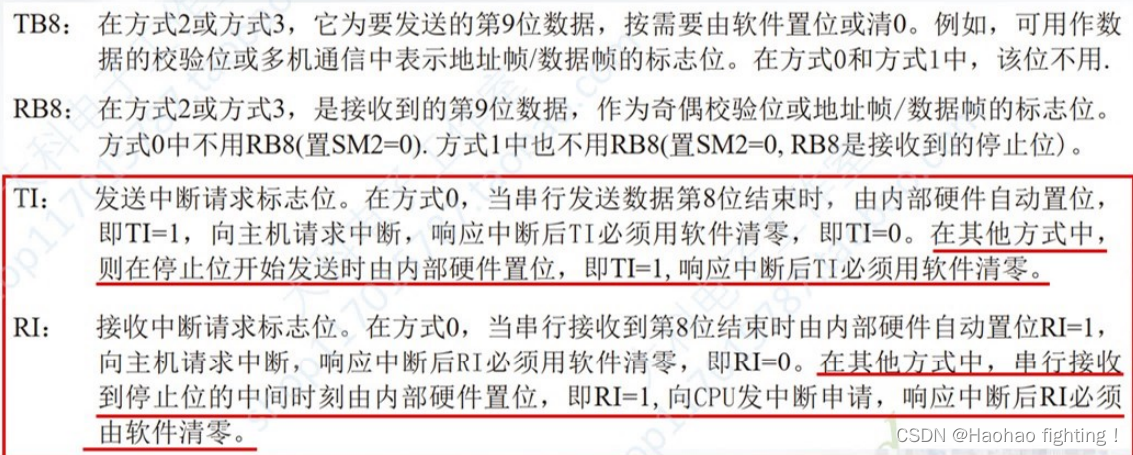
(4)串行口1中断相关寄存器
四、程序设计
(1)串口程序生成
(2)发送多个字符程序:
(3)串口中断程序:
五、程序源码
一、计算机常用通信方式
计算机常用通信方式有两种:并行通信和串行通信;
并行通信概述:
·多条数据线同时传送数据的每一位。
·其特点是:传送速度快,但所需数据线多,适用于近距离通信。
相当于对整个P1口进行赋值
串行通信概述:
通过单条数据线一位一位按顺序传送数。
其特点是:传送速度慢,但仅需一条数据线,故适用于远距离通信;
·串行通信有两种方式:异步串行通信和同步串行通信;
根据串行数据的传输方向,可以将通信分为:单工,半双工,双工。
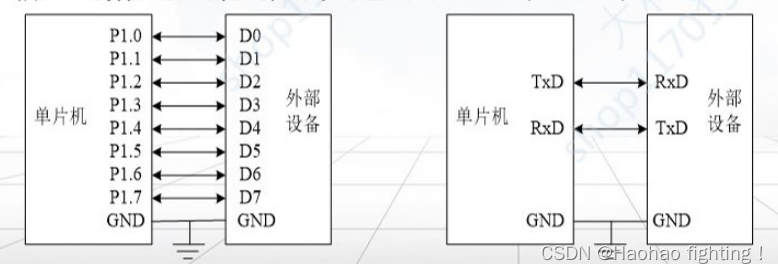
左图:并行;右图:串行
二、串口通信UART ·
通用异步收发传输器(Universal Asynchronous Receiver/Transmitter),通常称作UART。在UART上追加同步方式的序列信号,被称为USART(Universal Synchronous Asynchronous Receiver Transmitter)。
·异步通信的发送端和接收端可以由各自的时钟来控制数据的发送和接收,这两个时钟源彼此独立,互不同步(UART,1-WIRE)。
同步通信则要求发送端和接受端共同使用一个时钟信号(SP1,IIC)。
串口:串行接口。通常简称:串口通信,指使用单片机的串行接口进行数据传输。
注意要区分串行通信和串口的概念:
串行通信:是指一类通信概念。前面学的三种总线通信都属于串行通信,属于半双工,串口通信属于全双工。另一种分类:UART、单总线通信协议属于异步通信,SPI、IIC协议属于同步通信。
串口:串行接口,特指单片机上某几个引脚可以支持UART这种通信方式。
USB转串口概述:USB转串口即实现计算机USB接口到通用串口之间的转换。为没有串口的计算机提供快速的通道,而且,使用USB转串口设备等于将传统的串口设备变成了即插即用的USB设备。
UART通信协议:UART作为异步串口通信协议的一种,工作原理是将传输数据的每个字符一位接一位地传输。
串口通信的重要参数:波特率、数据位、停止位和奇偶校验。奇偶校验位:代表前面数据中有多少个1或0,对方在接收到数据之后也进行校验
三、串口通信寄存器
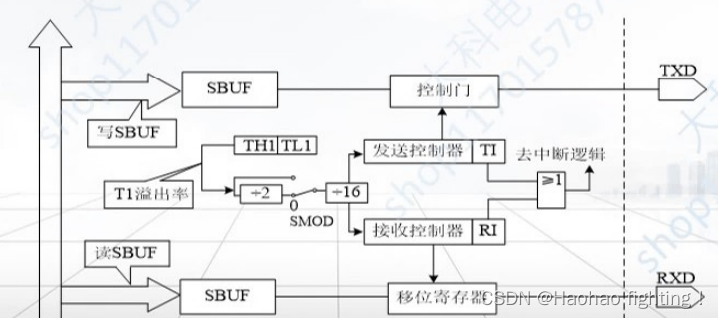
每个串行口由2个数据缓冲器SBUF、一个移位寄存器、一个串行控制寄存器和一个波特率发生器组成。
每个串行口的数据缓冲器SBUF由2个互相独立的接收、发送缓冲器构成,可同时发送接收数据。
发送缓冲器SBUF只能写入不能读出,接收缓冲器SBUF只能读出不能写入,因而两个缓冲器可共用一个地址码。
(1)串行口1控制寄存器SCON和PCON
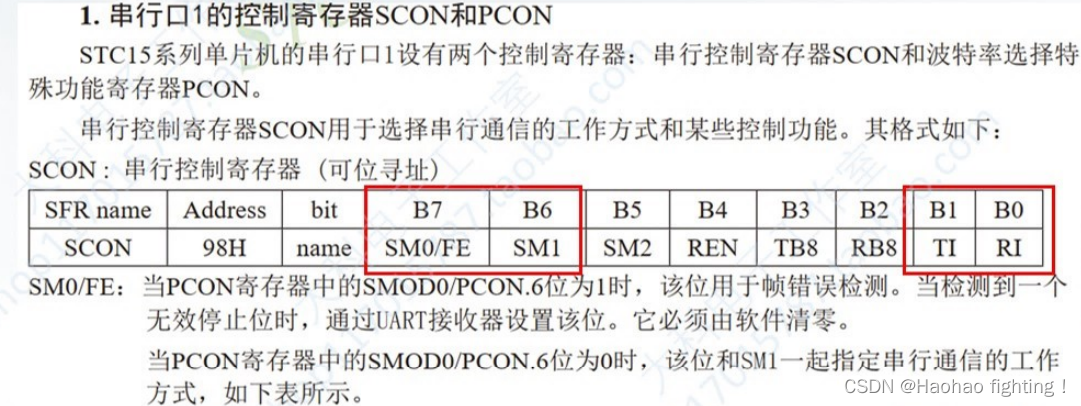
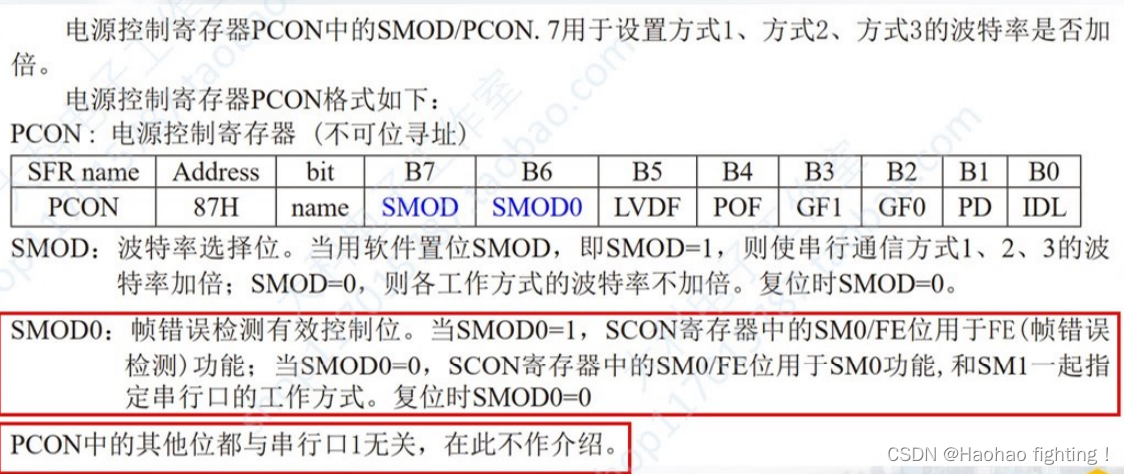
SMOD0位:初始上电就为0,不用管它。
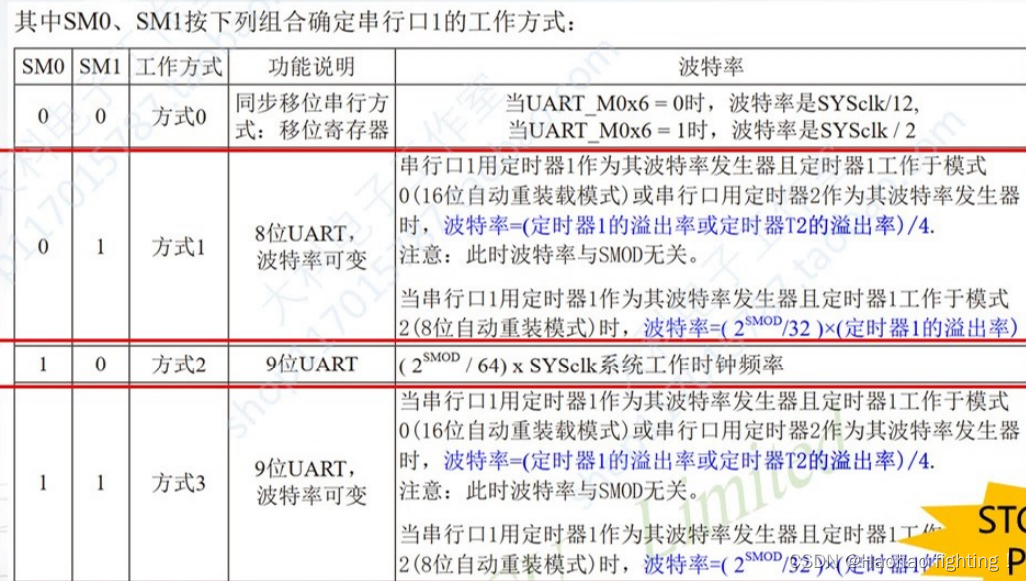
通常只使用方式1,方式3的9位:多一个奇偶校验位。
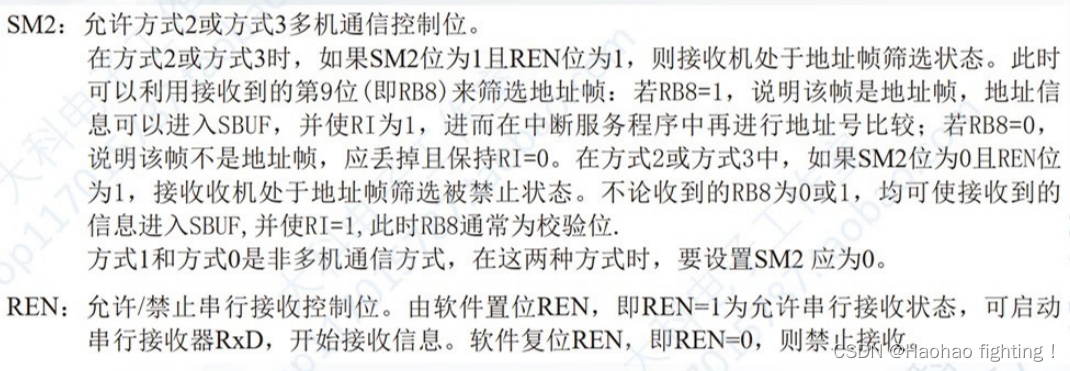
多机通信:多个单片机之间进行通信
 (2)串行口1数据缓冲器SBUF
(2)串行口1数据缓冲器SBUF
(3)串行口1辅助寄存器AUXR
定时器0不能作为波特率发生器

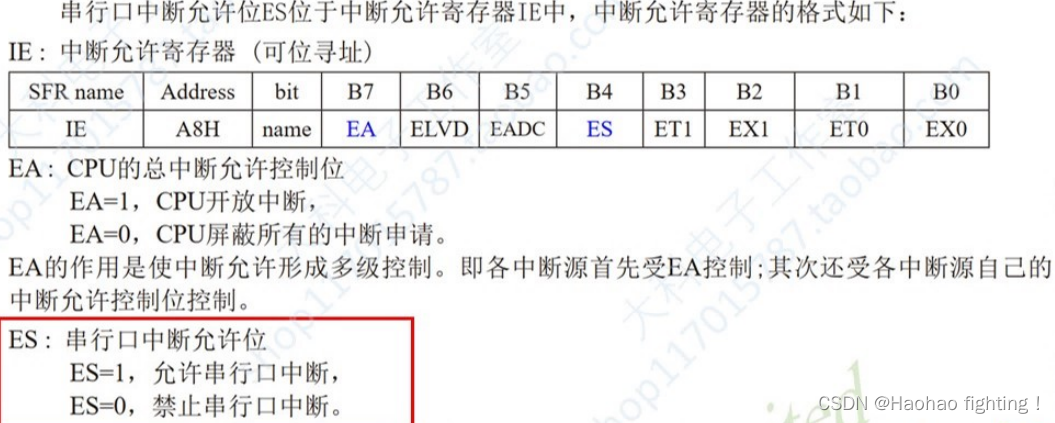
(4)串行口1中断相关寄存器
四、程序设计
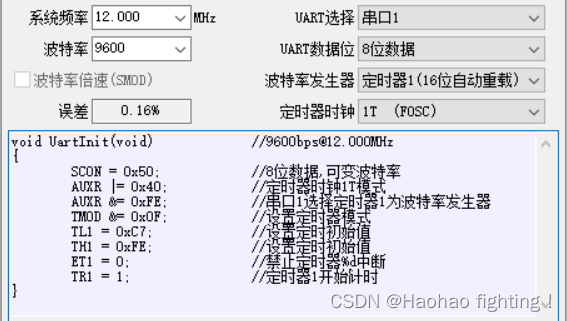
(1)串口程序生成
1-STC-ISP软件→波特率计算器;
2-选择使用的串口号、数据位、波特率发生器、定时器时钟;
3-选择系统时钟频率;
4-设置波特率;
5-生成C代码;
【注】:此为仅串行口初始化代码且已开始计时,但并没有串口相关中断允许、也没有开启总中断。
(2)发送多个字符程序:
void UART_TX(unsigned char *p)//发送数据函数,发送数组的话,这里就要定义一个指针 应用于:单片机向电脑发送数据
{
unsigned char index=0;
do
{
SBUF=p[index++];
while(TI == 0);//一直为0,数据还没发送完
TI = 0;//发送完之后,由用户置0
}
while(p[index]!=0);
}(3)串口中断程序:
void UART1() interrupt 4 //串口1中断
{
RI=0;//由用户将RI置0
RX = SBUF;
if(RX == '$')//应用于:电脑向单片机发送数据。单片机判断接收到的是否是这个字符,用单引号;如果判字符串,用双引号
{
P2=0X80;P0=0XFE;
}
else if(RX == '&')
{
P2=0X80;P0=0XFF;
}
}ES=1; 打开串口中断
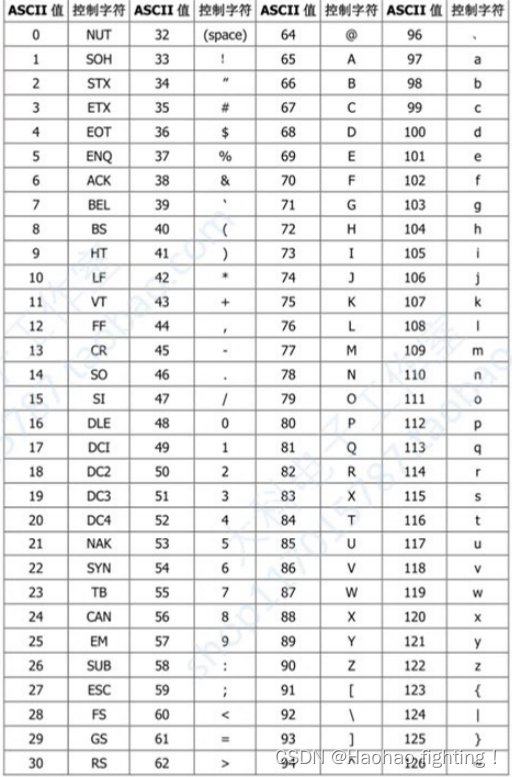
特别提醒:在处理发送数据的格式的时候,常用ASCII码进行转换,对应表如下:
五、程序源码
程序要求:串口指令:"STAD\r\n",返回"ONE"
#include <STC15F2K60S2.H>
#include <stdio.h>
#define uchar unsigned char
#define uint unsigned int
uchar code tab[]={0XC0,0XF9,0XA4,0XB0,0X99,0X92,0X82,0XF8,0X80,0X90,0XBF,0XFF};
uchar Smg_num=0;
uchar Smg[]={0,7,10,5,6,10,1,2};
sbit TX = P1^0;
sbit RX = P1^1;
unsigned char TX_chuankou[] = "USART TEST PROGRAM\r\n";//定义一个数组,发送一组数据
//unsigned char TX[] = {0x01,1,2,3};//这种方式与上面的区别:
//第一种定义如果里面有数字的话,会把里面的数字转换成它所对应的 ASCII码值,然后再转换成对应的二进制发送出去
//第二种直接将数字转换成二进制发送出去
unsigned char RX_chuankou[6];
uchar receive_num=0,chuanshu_shuju=0;
uchar receive_tt=0;
bit receive_over=0;
void Allinit();
void Delayms(uint ms);
void Keyscan();
void Keyscan16();
void Timer2Init(void); //1毫秒@11.0592MHz
void UartInit(void);
void UART_TX(unsigned char *p);
void main()
{
Allinit();
Timer2Init();
UartInit();
ES=1;EA=1;
while(1)
{
if(chuanshu_shuju==1)//查询数据指令
{
sprintf((char*)TX_chuankou,"ONE\r\n");
UART_TX(TX_chuankou);
chuanshu_shuju=0;receive_over=0;receive_num=0;
}
// else if(chuanshu_shuju==2)//查询参数指令
// {
// sprintf((char*)TX_chuankou,"TWO\r\n");
// UART_TX(TX_chuankou);
// chuanshu_shuju=0;receive_over=0;receive_num=0;
// }
// else if(chuanshu_shuju==3)//错误指令
// {
// sprintf((char*)TX_chuankou,"ERROR\r\n");
// UART_TX(TX_chuankou);
// chuanshu_shuju=0;receive_over=0;receive_num=0;
// }
Keyscan();
//Keyscan16();
//Delayms(5);
}
}
void UART1() interrupt 4 //串口1中断
{
if(RI)//RI 不为0
{
RX_chuankou[receive_num] = SBUF;
receive_num++;
receive_tt=1;//每接收到一次数据,就让接收计时变量置1.
RI=0;//由用户将RI置0
}
if(receive_over==1)//数据接收完成之后 进行判断
{
if((RX_chuankou[0]=='S')&(RX_chuankou[1]=='T')&(RX_chuankou[2]=='A')&(RX_chuankou[3]=='D')&(RX_chuankou[4]=='\r')&(RX_chuankou[5]=='\n'))
{
chuanshu_shuju=1;
}
// else if((RX_chuankou[0]=='A')&(RX_chuankou[1]=='A')&(RX_chuankou[2]=='A'))
// {
// chuanshu_shuju=2;
// }
// else chuanshu_shuju=3;
}
}
void UART_TX(unsigned char *p)//发送数据函数,发送数组的话,这里就要定义一个指针 应用于:单片机向电脑发送数据
{
unsigned char index=0;
do
{
SBUF=p[index++];
while(TI == 0);//一直为0,数据还没发送完
TI = 0;//发送完之后,由用户置0
}
while(p[index]!=0);
}
void UartInit(void) //9600bps@12.000MHz
{
SCON = 0x50; //8位数据,可变波特率
AUXR |= 0x40; //定时器时钟1T模式
AUXR &= 0xFE; //串口1选择定时器1为波特率发生器
TMOD &= 0x0F; //设置定时器模式
TL1 = 0xC7; //设置定时初始值
TH1 = 0xFE; //设置定时初始值
ET1 = 0; //禁止定时器%d中断
TR1 = 1; //定时器1开始计时
}
void timer2() interrupt 12
{
P2|=0XC0;
P2&=0XDF;
P0=(1<<Smg_num);
P2|=0XE0;
P2&=0XFF;
P0=tab[Smg[Smg_num]];
if(++Smg_num==8) Smg_num=0;
if(receive_tt>=1)
{
receive_tt++;
if(receive_tt>=30)
{
receive_tt=0;
receive_over=1;// 置1 代表接收数据完毕
}
}
}
void Timer2Init(void) //1毫秒@11.0592MHz
{
AUXR |= 0x04; //定时器时钟1T模式
T2L = 0xCD; //设置定时初始值
T2H = 0xD4; //设置定时初始值
AUXR |= 0x10; //定时器2开始计时
IE2|=0X04;EA=1;
}
void Allinit()
{
P2=0XA0;P0=0X00;
P2=0X80;P0=0XFF;
P2=0XC0;P0=0XFF;
P2=0XE0;P0=0XFF;
}
void Delayms(uint ms)
{
uint i,j;
for(i=ms;i>0;i--)
for(j=845;j>0;j--);
}