🎊专栏【Arduino】
🍔喜欢的诗句:更喜岷山千里雪 三军过后尽开颜。
🎆音乐分享【勋章】
大一同学小吉,欢迎并且感谢大家指出我的问题🥰
目录
🚥舵机图片
🚥舵机连接方式
🚥舵机代码基础知识
🎈头文件
🎈变量名
🎈attach(接口)
🎈write(角度)
🎈read()
🎈attached()
🎈detach()
🍔注意
以上语句的书写格式
设置舵机旋转的角度
🚥舵机代码例子
🎈舵机往返转动
🏳️🌈分析:
🚥舵机图片
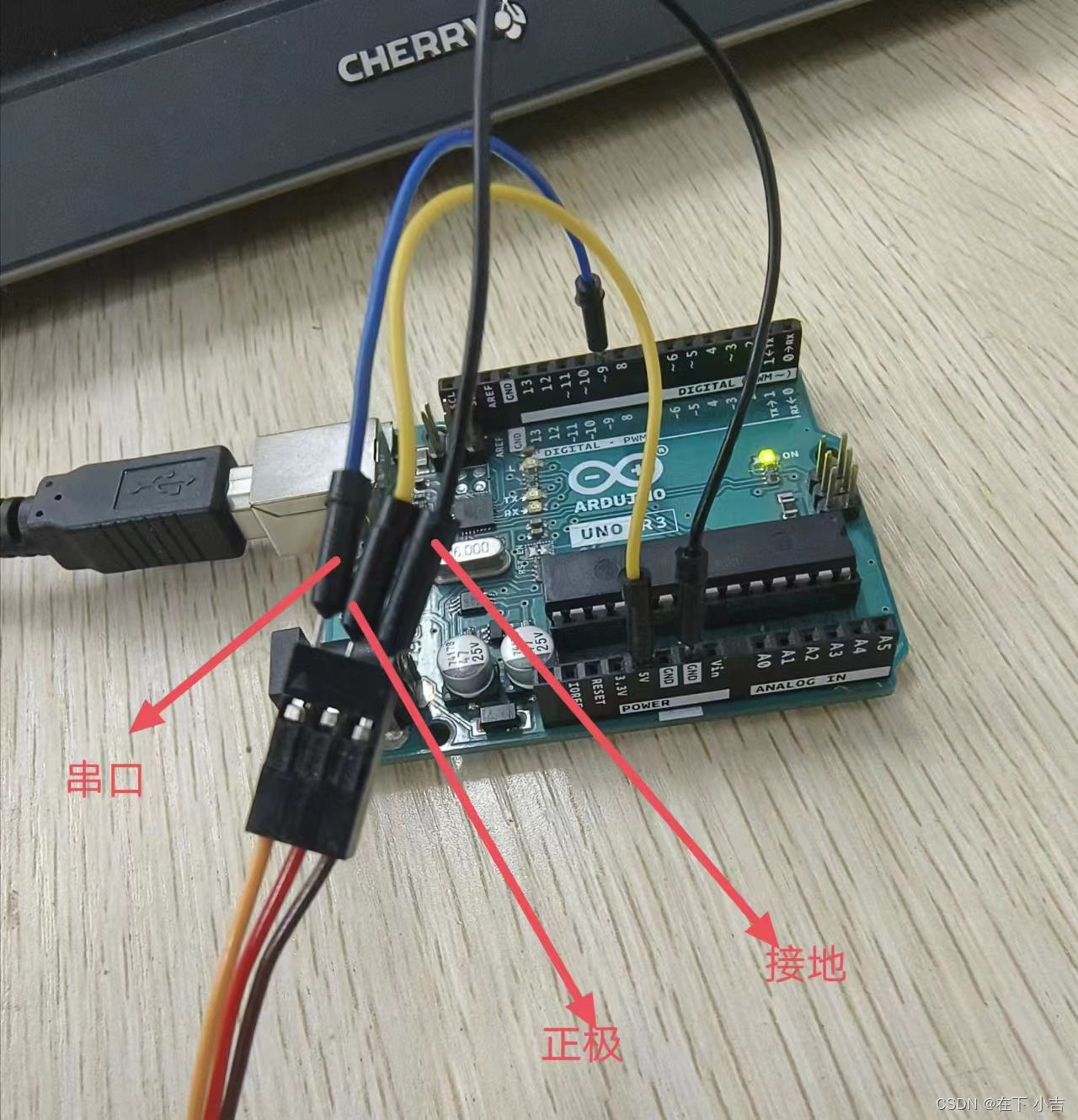
 注意,不同的舵机可以旋转的角度不同,有的是180°,270°,所以不要用手硬掰那个旋角
注意,不同的舵机可以旋转的角度不同,有的是180°,270°,所以不要用手硬掰那个旋角
🚥舵机连接方式
🚥舵机代码基础知识
🎈头文件
#include<Servo.h>
🎈变量名
Servo XXX;
🎈attach(接口)
设定舵机的接口,一般只有接口9或10可以使用
🎈write(角度)
设定舵机旋转角度的语句,角度范围0~180
🎈read()
读取舵机的角度(write命令中的值)
🎈attached()
判断舵机参数是否发送到舵机所在接口
🎈detach()
使舵机与其接口分离,该接口(9或10)可以继续被用作PWM接口
🍔注意
以上语句的书写格式
舵机变量名.具体语句()
设置舵机旋转的角度
angle = 90°和angle = -90°的方向是相反的
🚥舵机代码例子
🎈舵机往返转动
#include<Servo.h>
Servo duoji;
void setup() {
duoji.attach(9);
}
void loop() {
for(int i=0;i<90;i++)
{
duoji.write(i);
delay(10);
}
for(int i=89;i>=0;i--)
{
duoji.write(i);
delay(10);
}
}
🏳️🌈分析:
这段代码使用了 Arduino 的 Servo 库来控制一个舵机的运动。代码中定义了一个 duoji 的 Servo 对象,然后在 setup() 函数中使用 attach() 方法将该对象与数字引脚 9 连接。之后,在 loop() 函数中采用两个 for 循环,让舵机不断地往返转动。
具体来说,第一个 for 循环将舵机从初始位置逐渐旋转到 90 度位置,每次旋转 1 度,停留 10 毫秒;第二个 for 循环将舵机从 90 度位置逐渐旋转回初始位置,同样是每次旋转 1 度,停留 10 毫秒。这样就形成了一个周期性的舵机运动,当程序运行时,舵机不断旋转来回,直到被停止或者程序被重新编译上传。
需要注意的是,舵机的旋转范围通常为 0~180 度,超出此范围可能会造成损坏。因此,除非你已经确认了此舵机的可靠工作范围,否则不应该尝试将舵机旋转到超过这个范围的位置。
🥰如果大家有不明白的地方,或者文章有问题,欢迎大家在评论区讨论,指正🥰
Code over!