4.1 雅克比迭代法:
雅可比迭代法是一种用于求解线性方程组的迭代算法,其基本思想是将线性方程组中的系数矩阵拆分为对角线矩阵和非对角线矩阵两部分,并利用对角线矩阵的逆矩阵来迭代求解方程组。
具体地,设线性方程组为Ax=b,其中A为系数矩阵,b为常数向量,x为未知向量,雅可比迭代法的迭代公式如下:
x[i+1] = D^(-1) * (b - R * x[i])
其中,D为系数矩阵A的对角线矩阵,R为非对角线矩阵,即R=A-D。x[i]表示第i次迭代的解向量,x[i+1]表示第i+1次迭代的解向量。
雅可比迭代法的迭代过程中,每次迭代都只涉及对角线矩阵D和常数向量b的运算,因此具有简单、易于实现的优点。但是,该方法的收敛速度较慢,当系数矩阵的条件数较大时,可能需要进行大量的迭代才能达到较高的精度,因此在实际应用中,通常需要结合其他迭代算法来加速求解。
 我的理解:
我的理解:
雅可比迭代法是一种用于求解线性方程组的迭代算法,其基本思想是将系数矩阵拆分成对角线矩阵和非对角线矩阵,通过迭代的方式逐步逼近方程组的解。在每次迭代中,首先将解向量的初始值代入方程组中,然后用对角线矩阵的逆矩阵来更新解向量的每个分量,使其逐步逼近真实解。这样,通过多次迭代,可以得到较为精确的解。
雅可比迭代法的优点是简单易于实现,但其收敛速度较慢,通常需要迭代多次才能得到较高的精度。因此,在实际应用中,为了提高迭代速度和精度,可以结合其他迭代算法使用,如Gauss-Seidel迭代法、SOR迭代法等。
需要注意的是,雅可比迭代法只能用于求解对称正定的线性方程组,并且系数矩阵的对角线元素不能为零。如果系数矩阵满足这些条件,那么雅可比迭代法可以是一种简单、高效的求解线性方程组的方法。
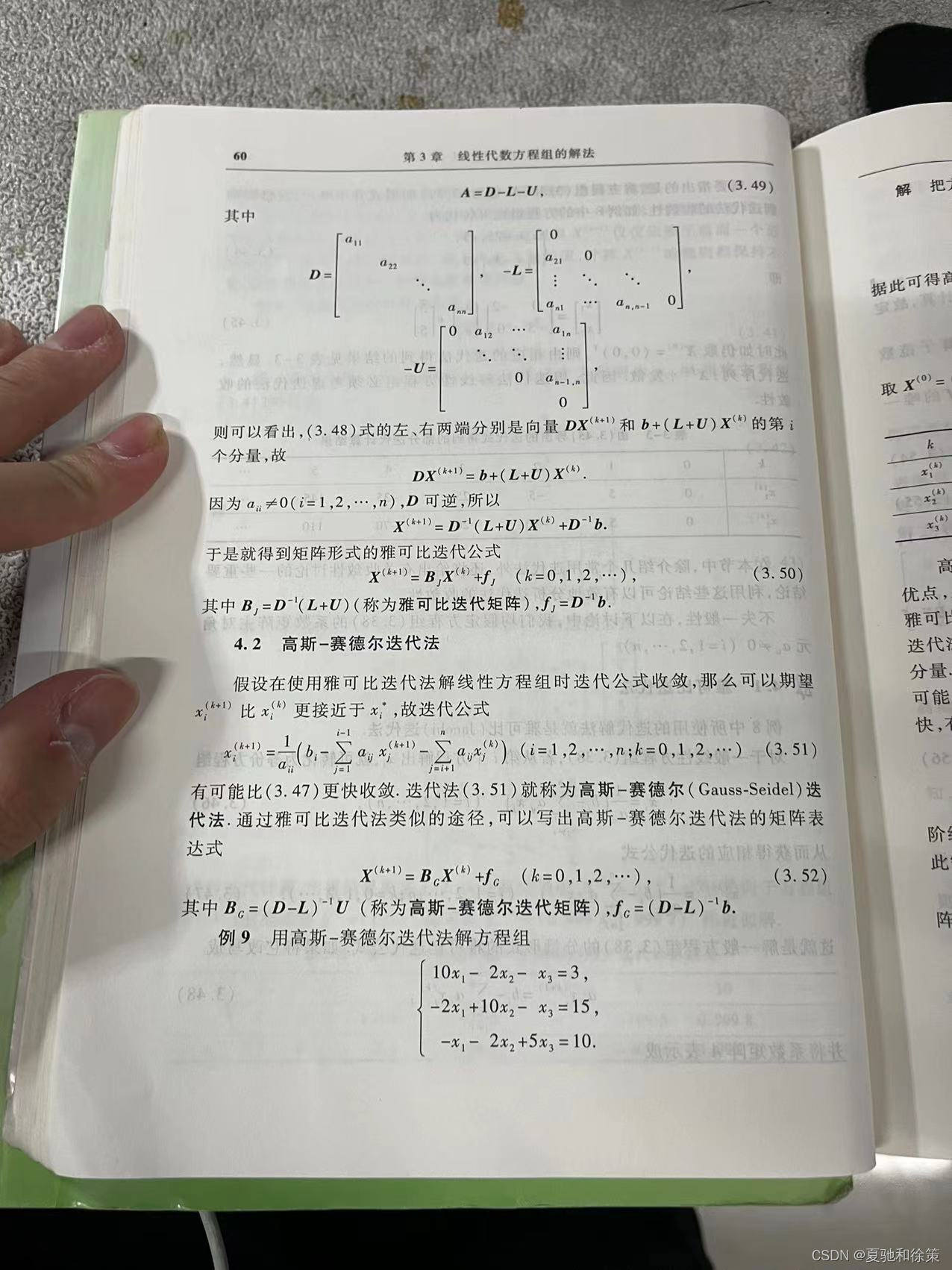
4.2 高斯—赛德尔迭代法:
高斯-赛德尔迭代法是一种用于求解线性方程组的迭代算法,其基本思想是在雅可比迭代法的基础上,每次更新解向量时,利用已经更新的分量来更新未更新的分量,从而加速迭代的过程。
具体来说,设线性方程组为Ax=b,其中A为系数矩阵,b为常数向量,x为未知向量。将系数矩阵A分解为下三角矩阵L、对角线矩阵D和上三角矩阵U的形式,即A=L+D+U。则高斯-赛德尔迭代法的迭代公式如下:
x[i+1] = (D+L)^(-1) * (-U * x[i] + b)
其中,x[i]表示第i次迭代的解向量,x[i+1]表示第i+1次迭代的解向量。在每次迭代中,首先将解向量的初始值代入方程组中,然后利用已经更新的分量来更新未更新的分量,从而逐步逼近真实解。
高斯-赛德尔迭代法相较于雅可比迭代法,可以加速迭代过程并提高收敛速度,但需要注意的是,该方法仍然只能用于求解对称正定的线性方程组,并且系数矩阵的对角线元素不能为零。此外,该方法的收敛性与系数矩阵的性质有关,不同的系数矩阵可能需要不同的迭代次数才能达到较高的精度。

我的理解:
高斯-赛德尔迭代法是一种用于求解线性方程组的迭代算法,它是雅可比迭代法的改进版。与雅可比迭代法相比,高斯-赛德尔迭代法可以加速迭代的过程并提高收敛速度。
在高斯-赛德尔迭代法中,首先将系数矩阵A分解为下三角矩阵L、对角线矩阵D和上三角矩阵U的形式,即A=L+D+U。然后,迭代过程中,先使用已知的更新后的解向量的分量来更新未知的分量,这样可以利用已经得到的信息来更快地逼近真实解。具体来说,迭代公式如下:
x[i+1] = (D+L)^(-1) * (-U * x[i] + b)
其中,x[i]表示第i次迭代的解向量,x[i+1]表示第i+1次迭代的解向量,b为常数向量。在每次迭代中,利用已知的分量更新未知的分量,直到误差达到所需的精度要求。
需要注意的是,高斯-赛德尔迭代法仅适用于对称正定的线性方程组,并且系数矩阵的对角线元素不能为零。此外,该方法的收敛性与系数矩阵的性质有关,不同的系数矩阵可能需要不同的迭代次数才能达到较高的精度。





3.4 逐次超松弛迭代法
逐次超松弛迭代法(Successive Over-Relaxation,SOR)也是一种用于求解线性方程组的迭代算法,它在雅可比迭代法和高斯-赛德尔迭代法的基础上进行了改进。
与高斯-赛德尔迭代法类似,逐次超松弛迭代法将系数矩阵A分解为下三角矩阵L、对角线矩阵D和上三角矩阵U的形式,即A=L+D+U。然后,在每次迭代中,先使用已知的更新后的解向量的分量来更新未知的分量,但是在更新的同时,使用一个松弛因子w来控制更新的幅度。这样,可以通过调整松弛因子w来控制迭代的速度和稳定性,从而提高收敛速度和精度。
具体来说,逐次超松弛迭代法的迭代公式如下:
x[i+1] = (1-w)x[i] + w(D+wL)^(-1)(-U*x[i] + b)
其中,x[i]表示第i次迭代的解向量,x[i+1]表示第i+1次迭代的解向量,b为常数向量。在每次迭代中,首先将解向量的初始值代入方程组中,然后利用已经更新的分量来更新未更新的分量,并通过调整松弛因子w来加速收敛。
需要注意的是,逐次超松弛迭代法的松弛因子w必须满足0<w<2的条件才能保证算法的收敛性。此外,松弛因子的取值对算法的收敛速度和精度有很大影响,需要根据具体问题来确定。在实际应用中,可以通过试错法或数值模拟等方法来确定合适的松弛因子。

我的理解:
逐次超松弛迭代法是一种求解线性方程组的迭代算法,它是在雅可比迭代法和高斯-赛德尔迭代法的基础上进行改进得到的。它的核心思想是通过使用一个松弛因子来控制每次迭代的幅度,从而提高迭代的速度和精度。
在每次迭代中,逐次超松弛迭代法先将系数矩阵A分解为下三角矩阵L、对角线矩阵D和上三角矩阵U的形式,即A=L+D+U。然后,使用已知的更新后的解向量的分量来更新未知的分量,但是在更新的同时,使用一个松弛因子w来控制更新的幅度。这样,在迭代的过程中,逐次超松弛迭代法可以通过调整松弛因子w来加速收敛并提高迭代的精度。
需要注意的是,逐次超松弛迭代法的松弛因子w必须满足0<w<2的条件才能保证算法的收敛性。此外,松弛因子的取值对算法的收敛速度和精度有很大影响,需要根据具体问题来确定。在实际应用中,可以通过试错法或数值模拟等方法来确定合适的松弛因子。
总的来说,逐次超松弛迭代法是一种比雅可比迭代法和高斯-赛德尔迭代法更快、更精确的求解线性方程组的方法,它在工程、科学计算等领域有着广泛的应用。


总结:
雅可比迭代法、高斯-赛德尔迭代法和逐次超松弛迭代法都是解线性方程组的迭代方法,它们的重点和难点以及易错点如下:
雅可比迭代法:
重点:
-
利用分量分离的思想,每次更新一个未知量。
-
迭代次数取决于迭代精度和初值。
难点和易错点:
-
雅可比迭代法的收敛速度较慢。
-
需要保证系数矩阵A是严格对角占优或严格对角占优加强条件。
-
初始猜测值的选择对迭代的结果有很大影响。
高斯-赛德尔迭代法:
重点:
-
利用分量分离的思想,每次更新一个未知量,同时使用前面已经更新过的未知量。
-
每次迭代相对于雅可比迭代法来说,都会使方程组的解更加接近真解。
难点和易错点:
-
需要保证系数矩阵A是对称正定。
-
初始猜测值的选择对迭代的结果有很大影响。
-
高斯-赛德尔迭代法的收敛速度比雅可比迭代法快,但是也存在收敛慢的情况。
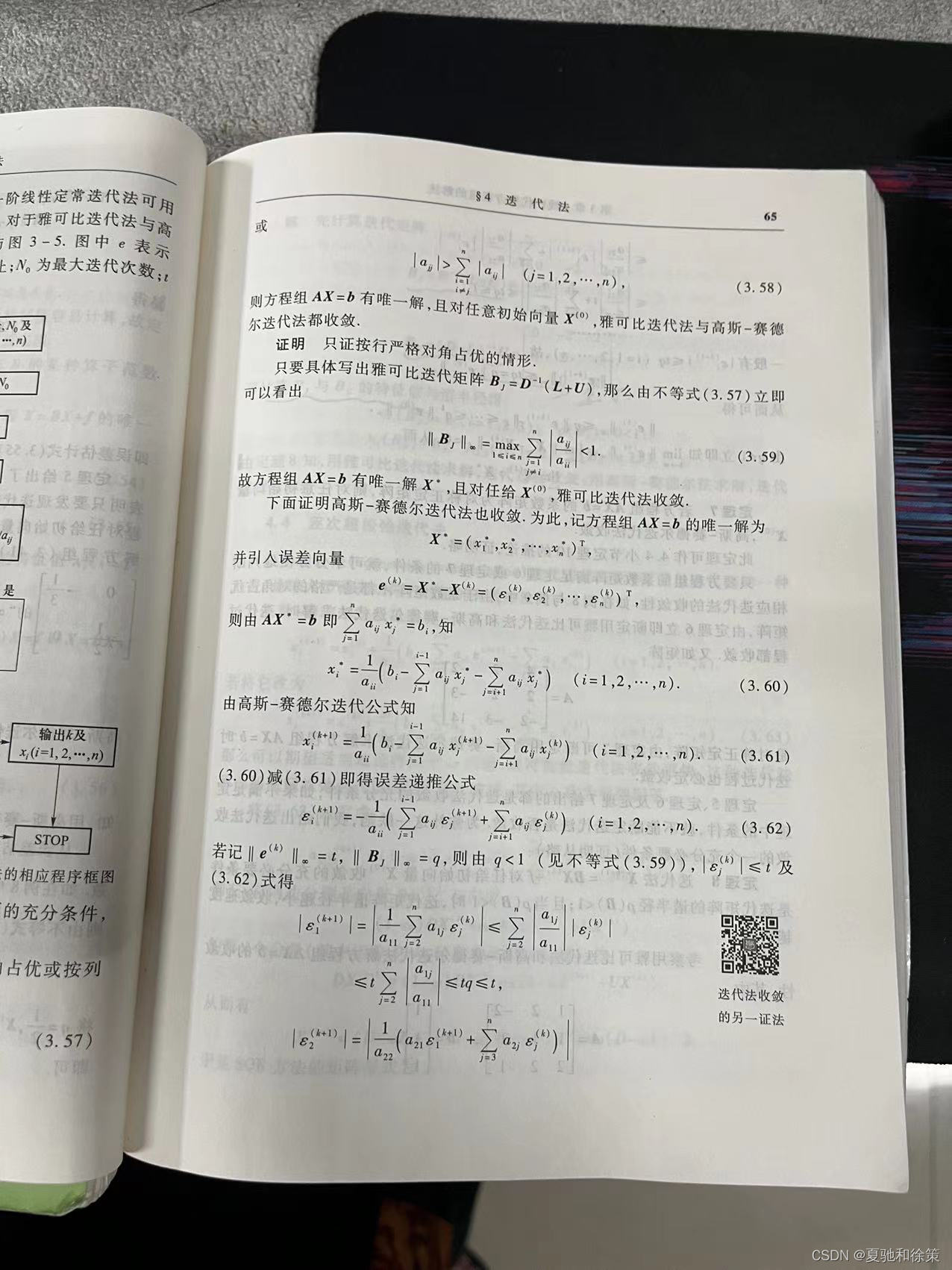
迭代法收敛条件与误差估计:
重点:
-
迭代法的收敛条件是:迭代矩阵的谱半径小于1。
-
误差的收敛速度取决于迭代矩阵的谱半径和初始误差的大小。
难点和易错点:
-
对于非线性问题,需要对迭代过程进行线性化,才能利用迭代法求解。
-
迭代矩阵的谱半径的计算比较困难,需要使用一些数值方法进行计算。
-
在误差估计中,需要考虑迭代过程的收敛速度和初值误差的大小,需要进行一定的数值模拟和分析。
逐次超松弛迭代法:
重点:
-
利用松弛因子来控制每次迭代的幅度,从而加速收敛并提高迭代的精度。
-
松弛因子的取值对算法的收敛速度和精度有很大影响,需要根据具体问题来确定。
难点和易错点:
- 在每次迭代中,需要对系数矩阵进行分解,即将系数矩阵
对于逐次超松弛迭代法,重点在于了解如何选择松弛因子,以及该方法的优点和限制。难点在于如何平衡松弛因子的大小和迭代次数的选择,以达到更快的收敛速度。易错点在于松弛因子的选择过大或过小,可能会导致迭代过程出现不稳定或者发散。
对于迭代法的收敛条件和误差估计,重点在于了解不同迭代方法的收敛条件和误差估计方法,以及如何利用这些方法来判断迭代是否收敛和估计误差。难点在于如何理解不同的收敛条件和误差估计方法,并在具体问题中灵活运用。易错点在于收敛条件的判断错误或者误差估计不准确,可能会导致迭代结果的错误。
总的来说,对于这些迭代方法,重点在于理解其基本原理和算法步骤,难点在于实际问题的应用和参数的选择,易错点在于算法的稳定性和收敛性的保证。