文章目录
- openpnp - 顶部相机辅助光的选择
- 概述
- 折腾的过程
- 简易灯板
- 市售的环形灯(不带漫射板)
- 市售的环形灯(不带漫射板) + LED单色光调光控制器.
- 市售的环形灯(带漫射板)
- 市售的环形灯(带漫射板) + 自己拆解(降低LED灯路数)
- END
openpnp - 顶部相机辅助光的选择
概述
终于将顶部相机辅助光搞定了.
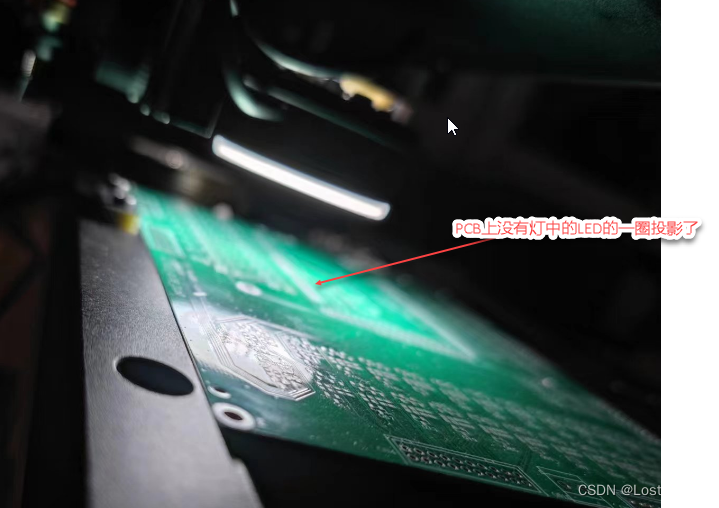
最终选择了市面上现成的环形无影灯(带散射板), 照到PCB上没有LED的一圈亮点投影了, openpnp曝光开到最低, 也可以正常执行白平衡了.
折腾的过程
简易灯板
同学给做的简易灯板(一圈环形摆放的贴片LED, 共8~10个), 可能设计的不太合理, 发热量极大. 手都摸不上去. 调顶部相机焦距时, 很容易被烫到.
在openpnp的顶部相机图像中, 看到相机十字下的PCB上有一圈LED的投影, 效果很差. 看着很难受.
市售的环形灯(不带漫射板)
这种灯照在PCB上, 也有灯中3圈LED的投影.
关键是这种灯很亮, 我的辅助光安装位置由于设备结构设计的原因, 离PCB只有30mm~40mm.
此时, openpnp曝光开到最低, 也无法得到一幅正常能看的正常顶部相机图片. 图像一片惨白, 根本不能用.
不是人家灯光有问题, 而是我的辅助光安装位置太低了. 怪不得人家.
市售的环形灯(不带漫射板) + LED单色光调光控制器.
买回来LED单色光调光控制器, 单独实验是没问题的, 可以很好的控制环形灯的亮度.
但是装到设备上, 配合openpnp来用, 就看出问题了.
调光控制器用的PWM方式调光, 人眼是看不出环形灯闪烁的.
但是在openpnp软件的顶部相机图像中, 就看出区别了.
只要不是100%亮度, openpnp图像就带黑色的横条(从上到下, 每个一段距离, 就有一条很明显的黑色横条, 横条的宽度大概0.5~1mm), 这些图像中的黑色横条, 就是灯不断闪烁引起的.
只要将调光控制器去掉, 直接给环形灯上24V电源的开关控制, 图像就是正常的.
看来, 这种PWM方式的调光控制器, 只能给普通的LED灯带进行调光. 对于相机用的辅助光调光, 从原理上就行不通.
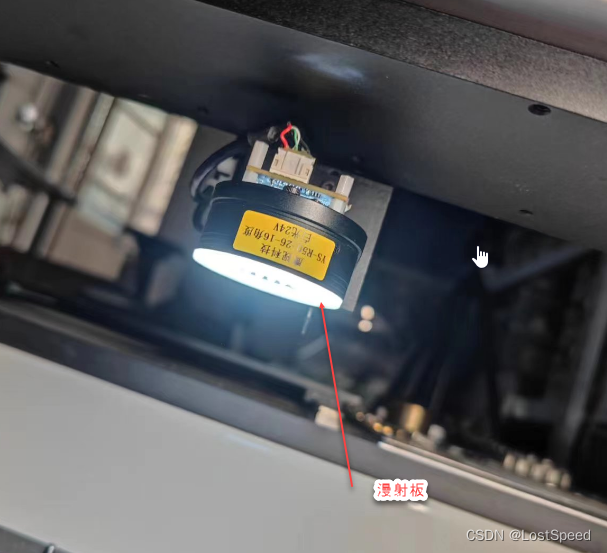
市售的环形灯(带漫射板)
这种方案, 就是我采用的方案.
灯光还是很亮, 但是将openpnp顶部相机曝光开到最低, 进行白平衡, 还是可以得到正常显示的图像的.
市售的环形灯(带漫射板) + 自己拆解(降低LED灯路数)
这种方案我还没弄, 因为上一个方案已经能正常用了.
这个方案留给以后做实验.
一般基于LED的照明灯, 给定一个输入电压(e.g. 24V), 厂家为了增强灯的亮度, 会采用每一路串联多个LED(满足固定输入电压的分压要求), 多路并联的方式.
路数越多, 灯越亮.
此时, 无损拆解该环形灯. 将不需要的路数去掉. e.g. 原来是3路灯, 现在改为2路或1路.
因为不能采用调光控制器(影响图像质量), 这种方案只适用于openpnp曝光开到最低, 也无法正常白平衡形成正常图片的情况.
我买灯时, 买了2个, 1个60度, 1个90度. 现在用的60度的, 已经正常用. 相机十字中间的图像会比外围稍微暗一点, 不明显.
90度的还没实验. 现在还没有到最后优化的时候.
等最后搞定后会拆一个. 将亮度降低.
或者自己参照人家的电路, 自己做个灯板PCBA放上去. 只要有4个LED就行, 有点亮度, 将环境光比下去.
我要求的亮度不要那么高. 只要比环境光高一点就好.
有辅助光之后, 环境光的影响就基本无视了.