EdgeBox_Umate_A100是一款嵌入式人工智能计算机,能够为各类终端设备赋予人工智能的能力,降低终端智能的开发门槛。EdgeBox_Umate_A100搭载了移动处理器——NVIDIA Jetson TX1,并且兼容TX2,是最适合边缘计算的高性能平台。

A100 算力盒子是“玩的开心”团队设计打造的基于TX1和TX2核心的,偏向控制方向的算力盒子,起特别适合2D激光雷达导航,和做图片级别的低速图像识别功能,当然处理一路1080P的视频,做实时推理计算也是可以的,毕竟之前海康,旷视都基于这些模块做过很多应用。
目录
接口说明
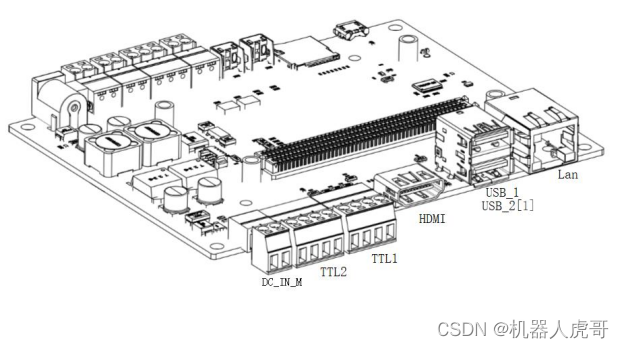
1、正面板接口
2、背面板接口
3 DC_IN_M
4 TTL2接口信号定义
5 TTL1接口信号定义
6 Reset Ctrl
7 Debug TTL接口信号定义
8 CAN0/CAN1接口信号定义
9 DC_IN_S接口定义
10 SSD固态安装
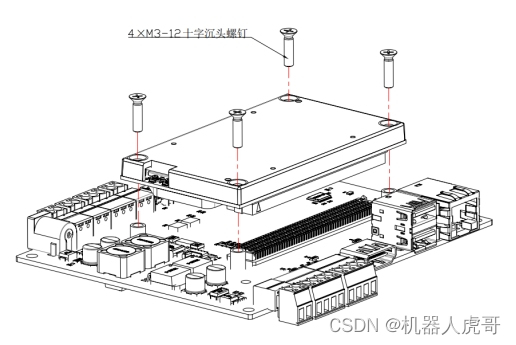
11 核心模块更换说明
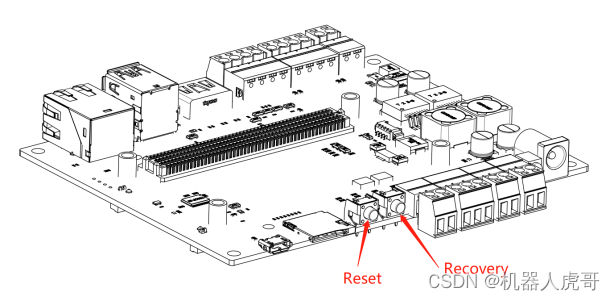
12 Rese和Recovery 按键位置说明
接口说明
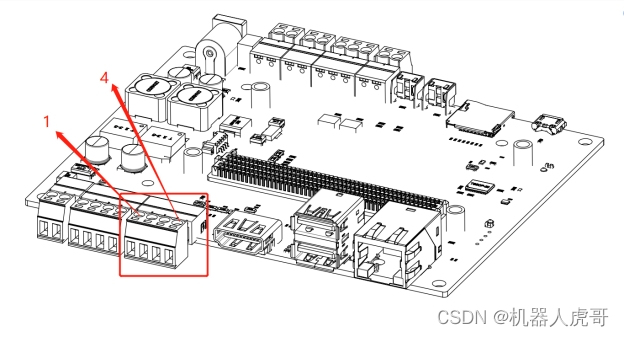
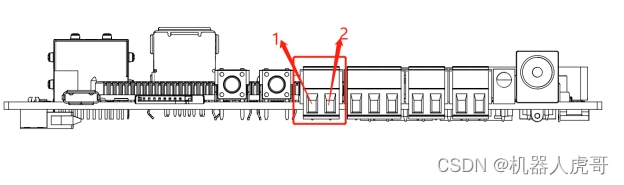
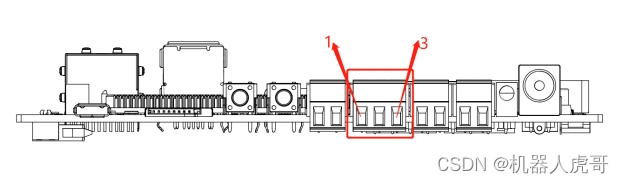
1、正面板接口
|
|
|---|
| 正面板接口示意图 |
|
|
| 内部载板正面示意图 |

| 接口 | 接口名称 | 接口说明 |
|---|---|---|
| DC_IN_M | DC12V电源输入 | 采用2.54间距绿段子的12V输入接口 |
| TTL2 | /dev/ttyTHS1 | TTL 3.3V,采用4P2.54间距绿段子,带12V、5V可配置电源输出和地 |
| TTL1 | /dev/ttyTHS2 | TTL 3.3V,采用4P2.54间距绿段子,带12V、5V可配置电源输出和地 |
| HDMI | HDMI 2.0接口 | HDMI 2.0 TYPE A 5V 1A |
| USB_1 | USB接口1号 | USB3.0接口,向下兼容USB2.0接口 支持USB3.0 超速、高速及低速模式 5V 1A |
| USB_2[1] | USB接口2号 | USB3.0接口,向下兼容USB2.0接口 支持USB3.0 超速、高速及低速模式 5V 1A |
| Lan | 千兆网口 | 千兆以太网口RJ45 |
[1]USB接口采用上下双层端子,USB2位于下层,USB1为上层
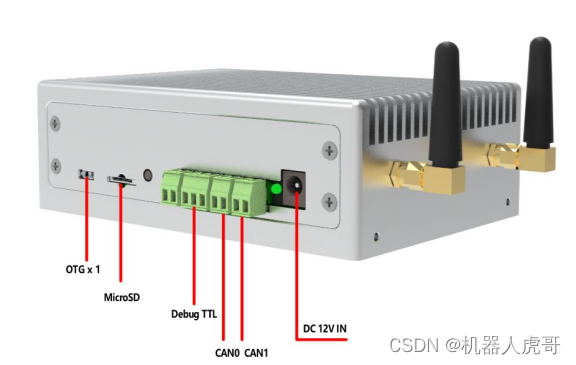
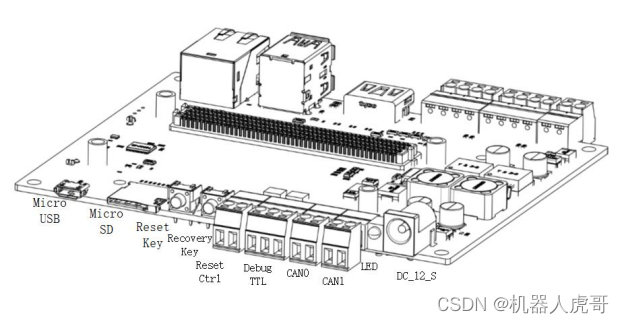
2、背面板接口
|
|
|---|
| 后面板接口示意图 |
|
|
| 内部载板示意图 |
| 接口 | 接口名称 | 接口说明 |
|---|---|---|
| Micro USB | 迷你USB接口 | 用于镜像烧写 支持主模式,OTG模式 5V 0.5A |
| MicroSD | SD卡接口 | 插入SD卡,可以扩展系统存储,也可以配置系统从SD卡启动 |
| Reset Key | 复位按钮 | 系统复位 |
| Recovery Key | 烧写模式控制 | 按住Recovery按键,然后再控制系统复位,系统进入烧写模式 |
| Reset Ctrl | 系统复位绿段子接口 | 可以被其它系统输入控制接地,控制系统重启 |
| Debug TLL | 系统调试TTL | 打印输出系统的调试信息 |
| CAN0 | CAN 电平接口0 | TX2核心才能使用,TX1核心没有此接口内部带120欧姆匹配 |
| CAN1 | CAN 电平接口2 | TX2核心才能使用,TX1核心没有此接口内部带120欧姆匹配 |
| Power LED | 电源输入指示灯 | |
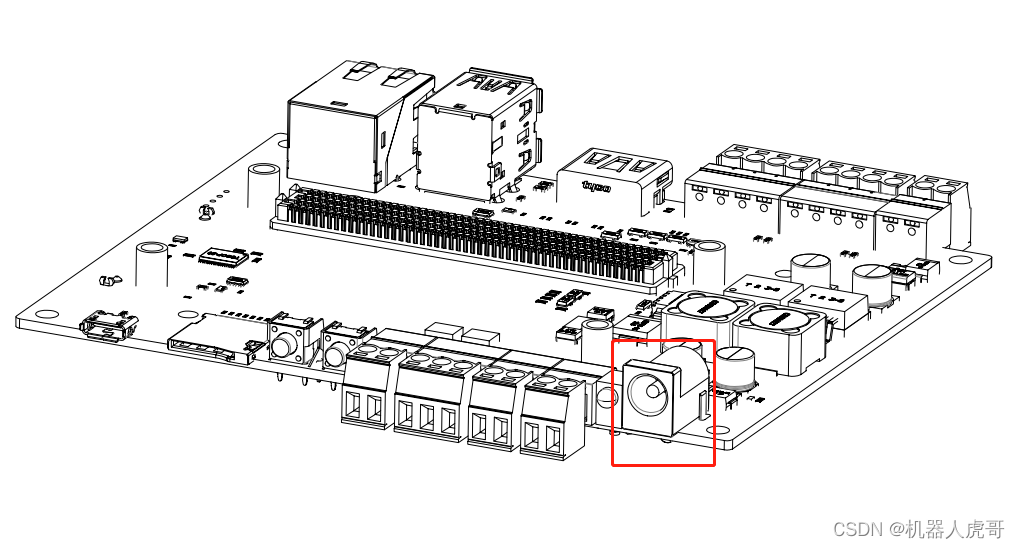
| DC_IN_S | 12V电源输入 | DC头的电源输入,方便一些模块电源直接输入 |
| SMA | 2.4G/5G WiFi天线外延口 | 外接WiFi天线 |
3 DC_IN_M
| 接口名称 | 引脚序号 | 信号定义 | 接口说明 |
|---|---|---|---|
| DC_IN_M | 1 | 12V | 电源输入正 |
| 2 | GND | 电源输入地 |
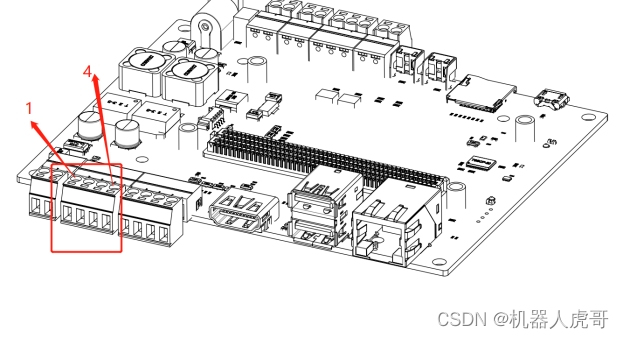
4 TTL2接口信号定义
| 接口名称 | 引脚序号 | 信号定义 | 接口说明 |
|---|---|---|---|
| TTL2 | 1 | 12V/5V★输出 | 12V/5V可配置输出电源,默认5V |
| 2 | TX | UART的TX信号 | |
| 3 | RX | UART的RX信号 | |
| 4 | GND | 输出地 |
5 TTL1接口信号定义
| 接口名称 | 引脚序号 | 信号定义 | 接口说明 |
|---|---|---|---|
| TTL1 | 1 | 12V/5V★输出 | 12V/5V可配置输出电源,默认5V |
| 2 | TX | UART的TX信号 | |
| 3 | RX | UART的RX信号 | |
| 4 | GND | 输出地 |
6 Reset Ctrl
| 接口名称 | 引脚序号 | 信号定义 | 接口说明 |
|---|---|---|---|
| Reset Ctrl | 1 | Reset | 复位信号输入 |
| 2 | GND | 系统地 |
7 Debug TTL接口信号定义
| 接口名称 | 引脚序号 | 信号定义 | 接口说明 |
|---|---|---|---|
| DC_IN_M | 1 | TX | UART的TX信号 |
| 2 | RX | UUART的RX信号 | |
| 3 | GND | 系统地 |
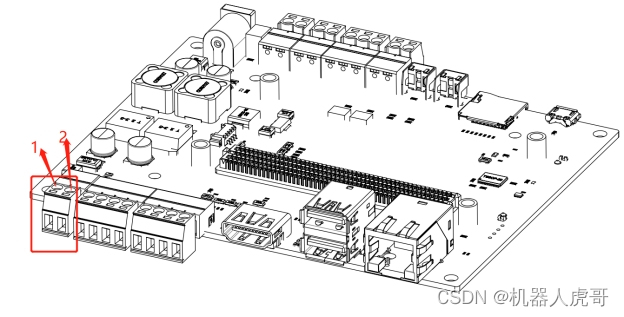
8 CAN0/CAN1接口信号定义

| 接口名称 | 引脚序号 | 信号定义 | 接口说明 |
|---|---|---|---|
| CAN0 | 1 | CAN_H | CAN 电平接口差分线H |
| 2 | CAN_L | CAN 电平接口差分线L | |
| CAN1 | 3 | CAN_H | CAN 电平接口差分线H |
| 4 | CAN_L | CAN 电平接口差分线L |
9 DC_IN_S接口定义
| 接口名称 | 引脚序号 | 信号定义 | 接口说明 |
|---|---|---|---|
| DC_IN_S | 1 | 12V | 电源输入正 内针 |
| 2 | GND | 电源输入地 外 |
10 SSD固态安装

11 核心模块更换说明
12 Rese和Recovery 按键位置说明
我自己亲自上手了这个算力盒子,做的很用心。背靠NVIDIA的技术路线,可以用来做导航,也可以用来做图像识别,机器人方向应用的不二选择,性价比之王没的说了。
让我们一起开始构建基于这款盒子的应用吧。