文章目录
- 0.引言
- 1.创建界面ui相关文件
- 2.添加界面ui相关文件到CloudCompare工程
- 3.修改工程相关文件
- 4.结果展示
0.引言
CloudCompare源代码编译成功后,即可进行二次开发,可以通过修改源码实现二次开发,二次开发基础功能见(CloudCompare如何进行二次开发?),若想要实现更多自定义功能,可以自定义界面ui,并操作CloudCompare程序处理数据。本文讲解界面ui设计,修改相应的文件,使CloudCompare能够被扩展的ui界面进行克隆点云操作。
1.创建界面ui相关文件
(1)在CloudCompare工程源码文件下新建Qt工程
本文在E:\CloudCompare-2.10.x\qCC\文件夹下创建初始Qt文件(如何在VS中使用Qt创建Qt工程详见:Visual Studio如何使用Qt开发桌面软件?)。
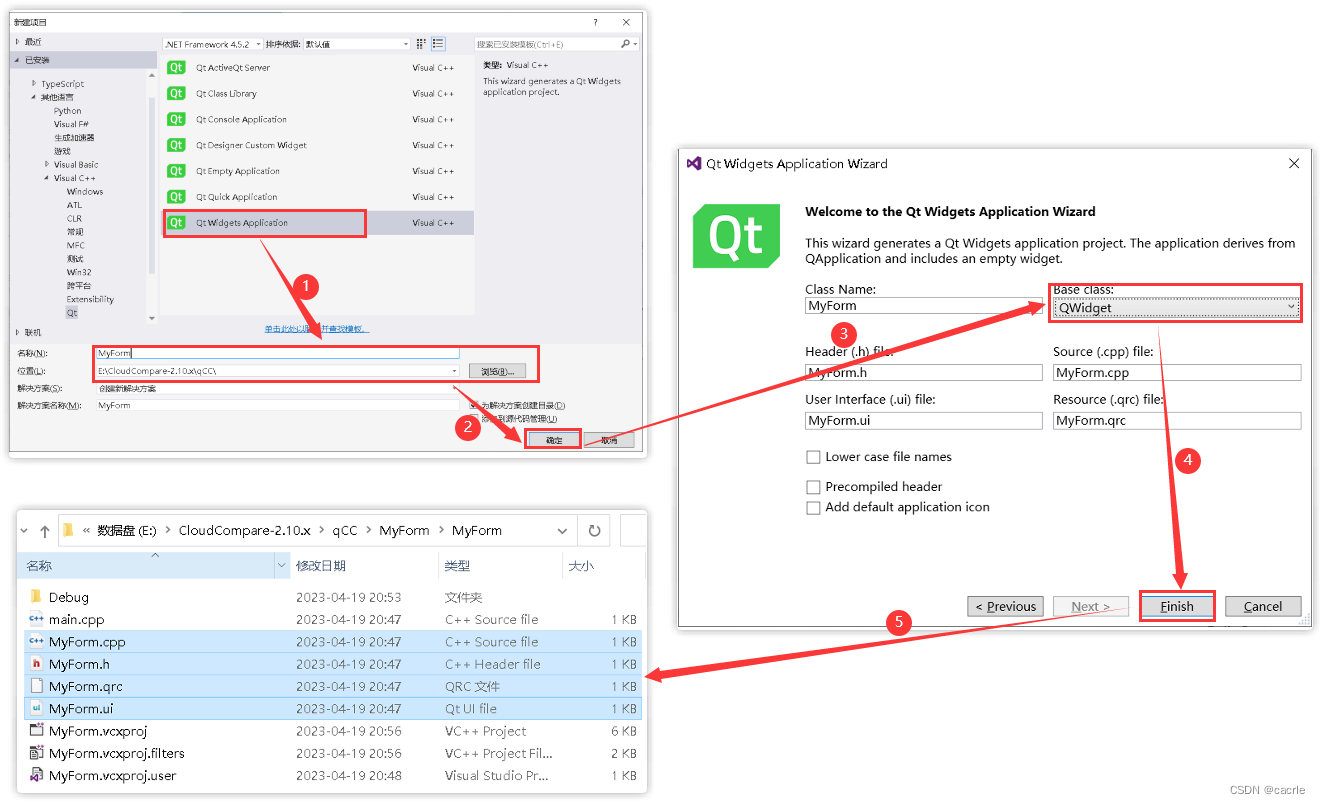
本文根据创建的Qt文件,主要使用的文件目录为:E:\CloudCompare-2.10.x\qCC\MyForm\MyForm\
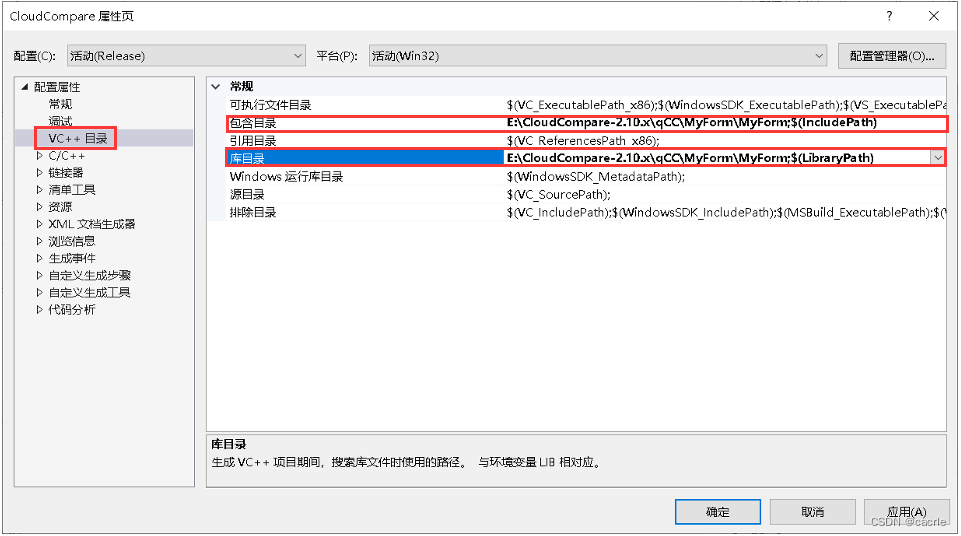
将该目录包含进CloudCompare搜索路径:CloudCompare工程→属性→配置属性→VC++目录→包含目录和库目录。
2.添加界面ui相关文件到CloudCompare工程
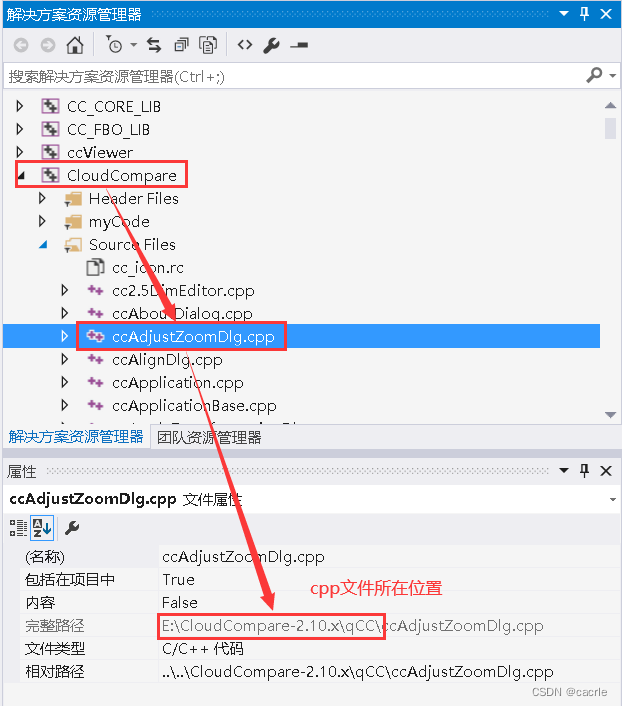
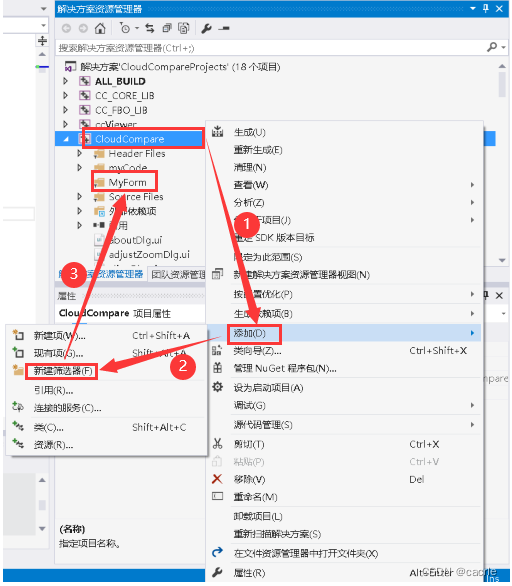
(1)用Visual Studio打开CloudCompare源码工程,添加MyForm项目的文件.ui、.h、.cpp
①工程新建一个筛选器存放MyForm相关文件
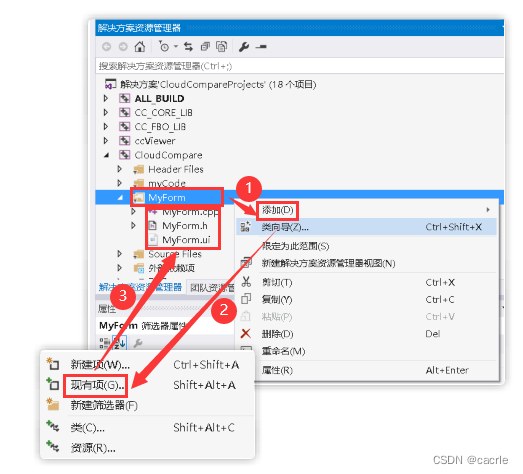
②添加文件
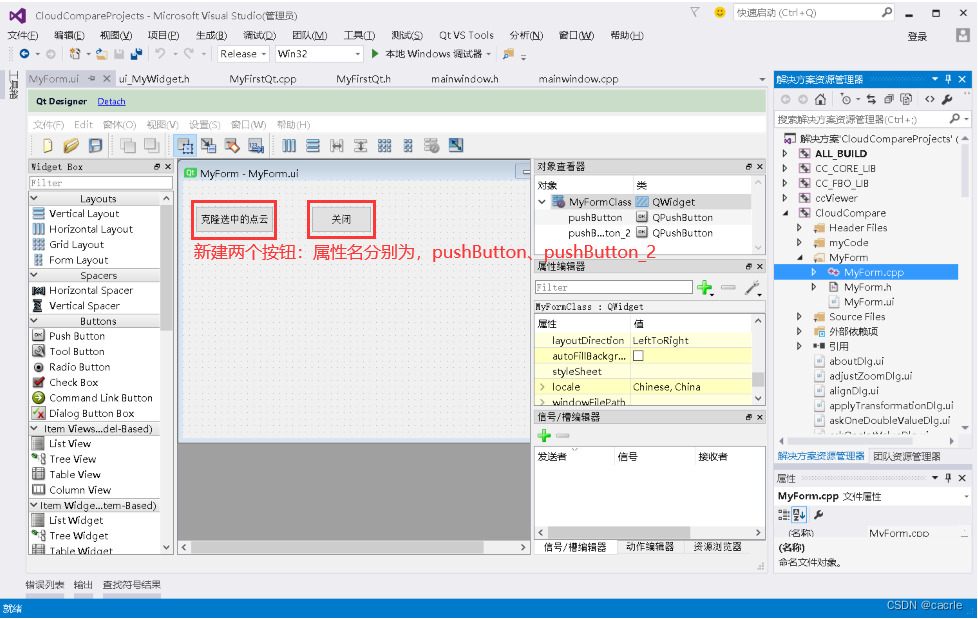
(2)设计界面
3.修改工程相关文件
(1)修改MyForm相关文件
①修改MyForm.ui属性,并编译
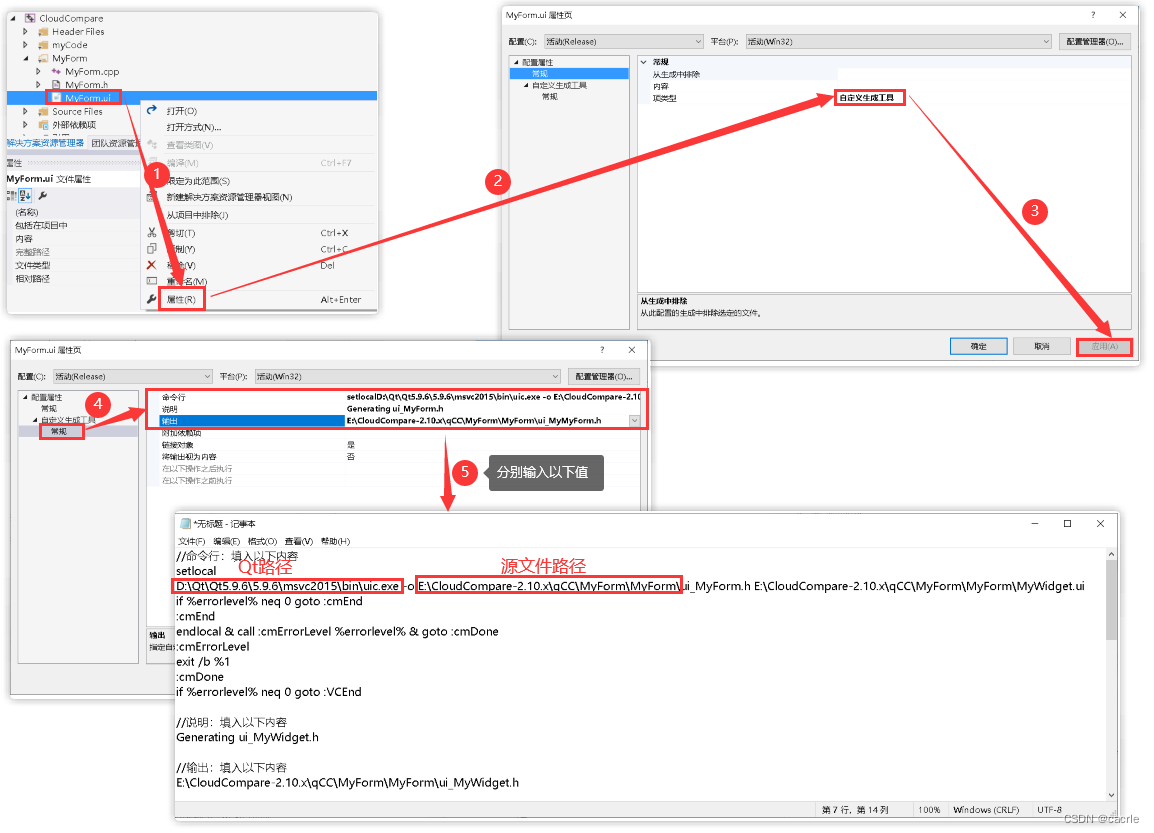
//命令行:填入以下内容
setlocal
D:\Qt\Qt5.9.6\5.9.6\msvc2015\bin\uic.exe -o E:\CloudCompare-2.10.x\qCC\MyForm\MyForm\ui_MyForm.h E:\CloudCompare-2.10.x\qCC\MyForm\MyForm\MyForm.ui
if %errorlevel% neq 0 goto :cmEnd
:cmEnd
endlocal & call :cmErrorLevel %errorlevel% & goto :cmDone
:cmErrorLevel
exit /b %1
:cmDone
if %errorlevel% neq 0 goto :VCEnd
//说明:填入以下内容
Generating ui_MyForm.h
//输出:填入以下内容
E:\CloudCompare-2.10.x\qCC\MyForm\MyForm\ui_MyForm.h
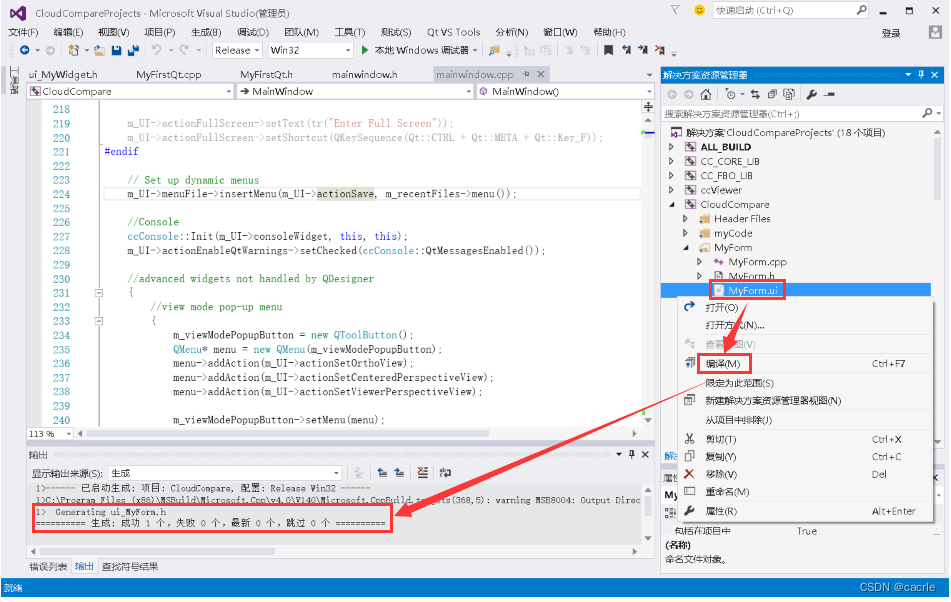
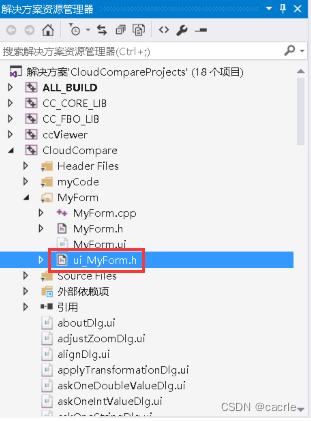
将生成的ui_MyForm.h加入工程。
②修改MyForm.h属性,并编译
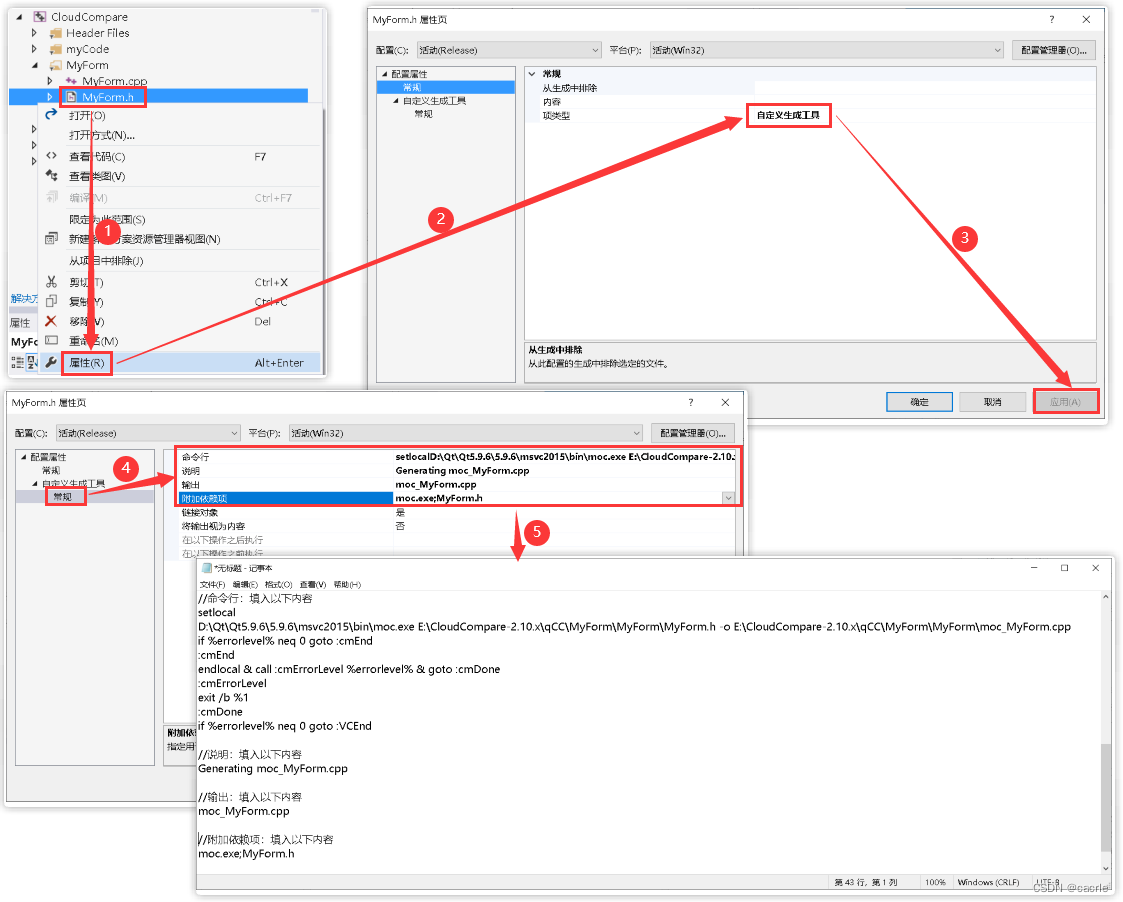
//命令行:填入以下内容
setlocal
D:\Qt\Qt5.9.6\5.9.6\msvc2015\bin\moc.exe E:\CloudCompare-2.10.x\qCC\MyForm\MyForm\MyForm.h -o E:\CloudCompare-2.10.x\qCC\MyForm\MyForm\moc_MyForm.cpp
if %errorlevel% neq 0 goto :cmEnd
:cmEnd
endlocal & call :cmErrorLevel %errorlevel% & goto :cmDone
:cmErrorLevel
exit /b %1
:cmDone
if %errorlevel% neq 0 goto :VCEnd
//说明:填入以下内容
Generating moc_MyForm.cpp
//输出:填入以下内容
moc_MyForm.cpp
//附加依赖项:填入以下内容
moc.exe;MyForm.h
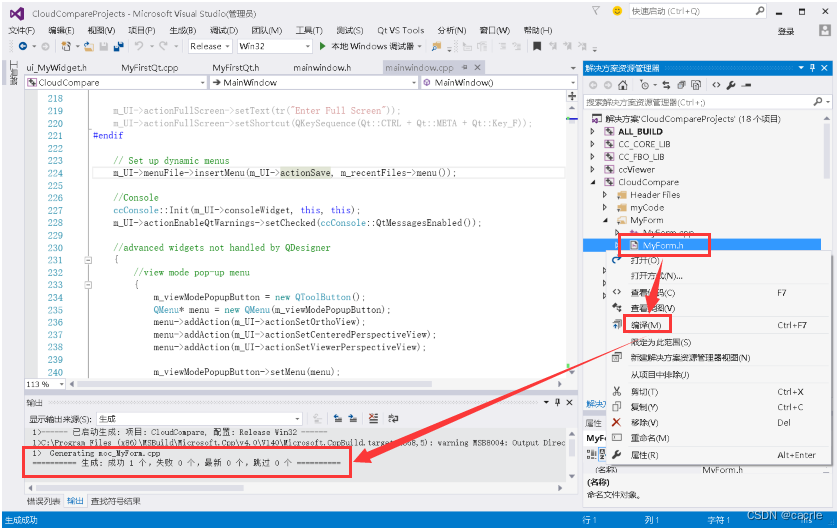
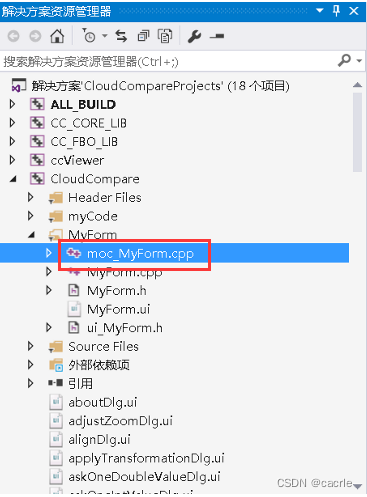
将生成的moc_MyForm.cpp加入工程。
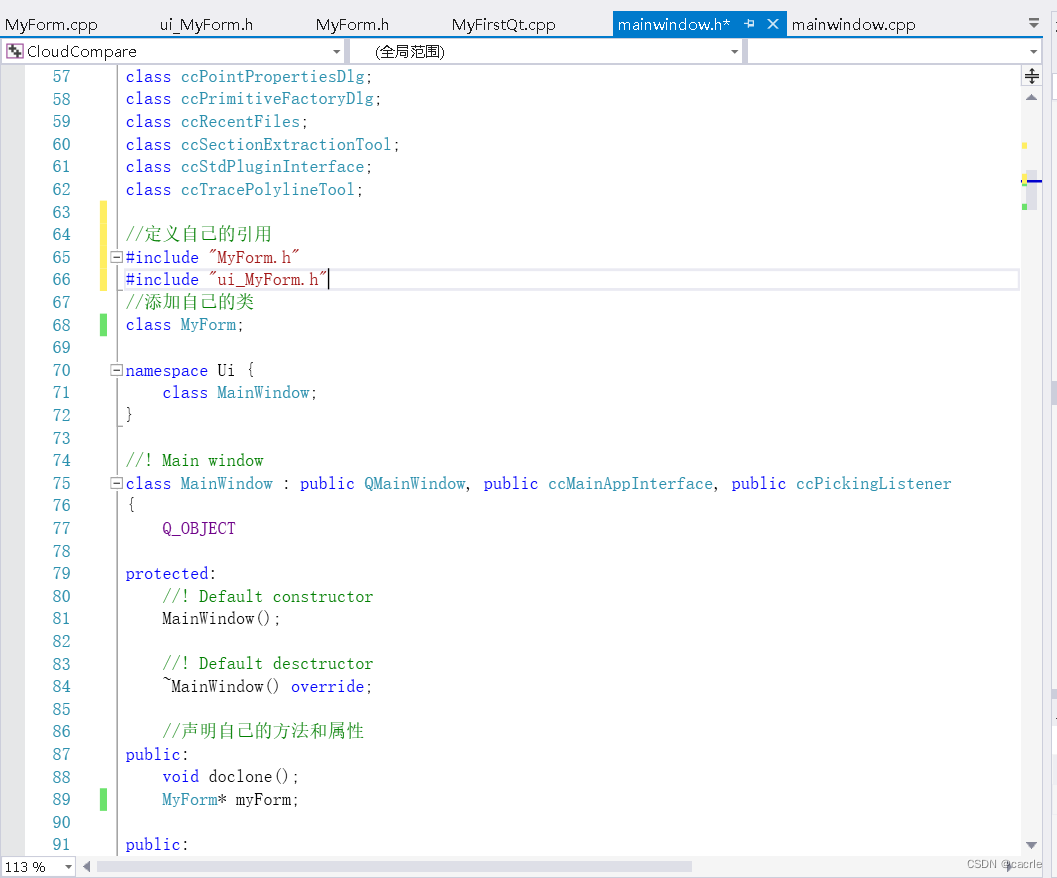
③修改MyForm.h代码
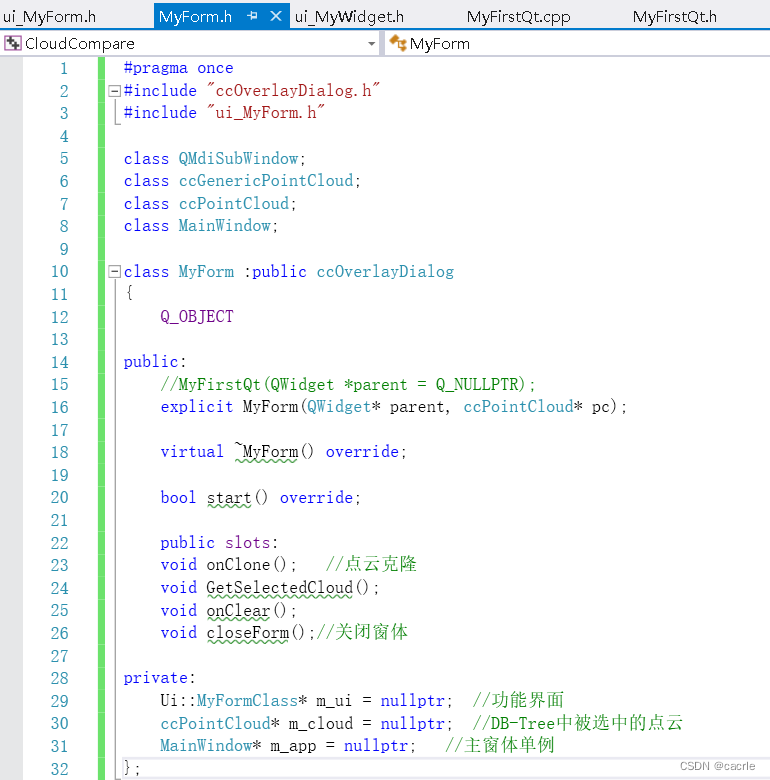
#pragma once
#include "ccOverlayDialog.h"
#include "ui_MyForm.h"
class QMdiSubWindow;
class ccGenericPointCloud;
class ccPointCloud;
class MainWindow;
class MyForm :public ccOverlayDialog
{
Q_OBJECT
public:
//MyFirstQt(QWidget *parent = Q_NULLPTR);
explicit MyForm(QWidget* parent, ccPointCloud* pc);
virtual ~MyForm() override;
bool start() override;
public slots:
void onClone(); //点云克隆
void GetSelectedCloud();
void onClear();
void closeForm();//关闭窗体
private:
Ui::MyFormClass* m_ui = nullptr; //功能界面
ccPointCloud* m_cloud = nullptr; //DB-Tree中被选中的点云
MainWindow* m_app = nullptr; //主窗体单例
};
④修改MyForm.cpp代码
#pragma once
#include "MyForm.h"
#include "ccGLWindow.h"
#include <ccGLWidget.h>
#include <QMdiSubWindow>
#include "ccPointCloud.h"
#include "mainwindow.h"
#include "ccDBRoot.h"
#include "ccConsole.h"
MyForm::MyForm(QWidget* parent, ccPointCloud* pc)
:ccOverlayDialog(parent)
, m_ui(new Ui::MyFormClass)
, m_cloud(pc)
{
//m_ui->setupUi(this);
m_ui->setupUi(this);
//获取主窗体单例
m_app = MainWindow::TheInstance();
//信号槽连接
connect(m_ui->pushButton, &QAbstractButton::clicked, this, &MyForm::onClone);
connect(m_ui->pushButton_2, &QAbstractButton::clicked, this, &MyForm::closeForm);
}
MyForm::~MyForm()
{
if (m_ui) {
delete m_ui;
m_ui = nullptr;
}
if (m_cloud) {
delete m_cloud;
m_cloud = nullptr;
}
}
bool MyForm::start()
{
ccOverlayDialog::start();
m_processing = false;
return true;
}
void MyForm::GetSelectedCloud()
{
if (m_cloud)
{
//设置取消选中上一块点云,同时包围盒消失
m_cloud->setSelected(false);
}
//DB-Tree中所有被选中的实体存入container
ccHObject::Container container;
m_app->db()->getSelectedEntities(container);
if (container.size())
{
//拿到第一个被选中的实体
ccHObject* ent = container[0];
if (!ent->isKindOf(CC_TYPES::POINT_CLOUD))
{
ccConsole::Error(QStringLiteral("选择的对象不是点云类型!"));
return;
}
ccGenericPointCloud* cloud = ccHObjectCaster::ToGenericPointCloud(ent);
m_cloud = static_cast<ccPointCloud*>(cloud);
//设置选中当前点云,同时显示包围盒
m_cloud->setSelected(true);
}
//刷新
m_app->RefreshAllGLWindow();
}
void MyForm::onClear()
{
m_cloud->clear();
m_cloud = nullptr;
}
void MyForm::onClone()
{
if (!m_cloud)
{
return;
}
//法一(点到点的克隆)
ccPointCloud* pc = new ccPointCloud(m_cloud->getName() + QString("-Clone"));
//为克隆对象分配内存
pc->reserve(m_cloud->size());
size_t pointSize = m_cloud->size();
for (size_t i = 0; i < pointSize; ++i)
{
pc->addPoint(*m_cloud->getPoint(i));
}
//法二(调用ccPointCloud的接口克隆)
//ccPointCloud* pc = new ccPointCloud(m_cloud->getName() + QString("-Clone"));
//m_cloud->clone(pc);
//将克隆点云pc添加到与m_cloud相同的目录下,并选中。
m_cloud->getParent()->addChild(pc);
m_app->db()->selectEntity(pc);
m_app->addToDB(pc);
m_app->UpdateUI();
}
void MyForm::closeForm()
{
this->close();
}
(2)修改mainwindow源文件
①修改mainwindow.h代码
②修改mainwindow.cpp代码
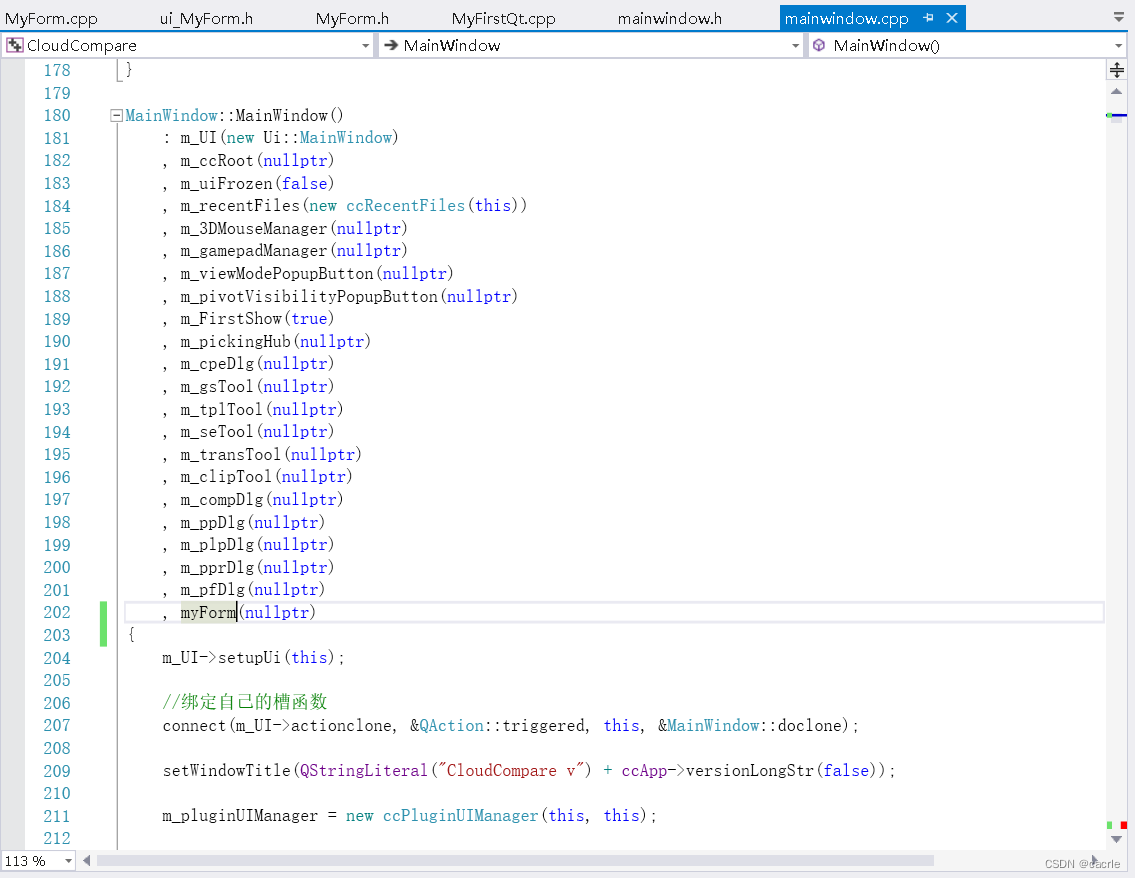
void MainWindow::doclone()
{
//判断DB-Tree内是否选中对象
if (!haveOneSelection())
{
ccConsole::Error(QStringLiteral("请在 DB Tree 内选择点云实体对象!"));
return;
}
//获取当前DB-Tree中选择的实体对象
ccHObject* ent = m_selectedEntities[0];
//判断是否为点云对象(这里也可能是矢量栅格对象)
if (!ent->isKindOf(CC_TYPES::POINT_CLOUD))
{
ccConsole::Error(QStringLiteral("选择的对象不是点云类型!"));
return;
}
//将实体对象ent转换成ccGenericPointCloud对象
ccGenericPointCloud* gCloud = ccHObjectCaster::ToGenericPointCloud(ent);
//ccGenericPointCloud是抽象类,不能被实例化,所以向下转换成子类对象ccPointCloud,我们可以通过ccPointCloud来操作点云
ccPointCloud* pCloud = static_cast<ccPointCloud*>(gCloud);
//Qt MDI框架
QMdiSubWindow* qWin = m_mdiArea->activeSubWindow();
if (!qWin)
return;
if (!myForm)
{
//自定义对象m_colorDlg传入点云pCloud
myForm = new MyForm(qWin, pCloud);
//连接信号槽:使得后台可以实时获取用户在DB-Tree内所选中的点云
connect(m_ccRoot, &ccDBRoot::selectionChanged, myForm, &MyForm::GetSelectedCloud);
//当DB-Tree为空时,清空点云
connect(m_ccRoot, &ccDBRoot::dbIsEmpty, myForm, &MyForm::onClear);
//使得m_colorDlg能够停靠在点云显示窗口的右上角
registerOverlayDialog(myForm, Qt::TopRightCorner);
}
//显示m_colorDlg
myForm->start();
updateOverlayDialogsPlacement();
}
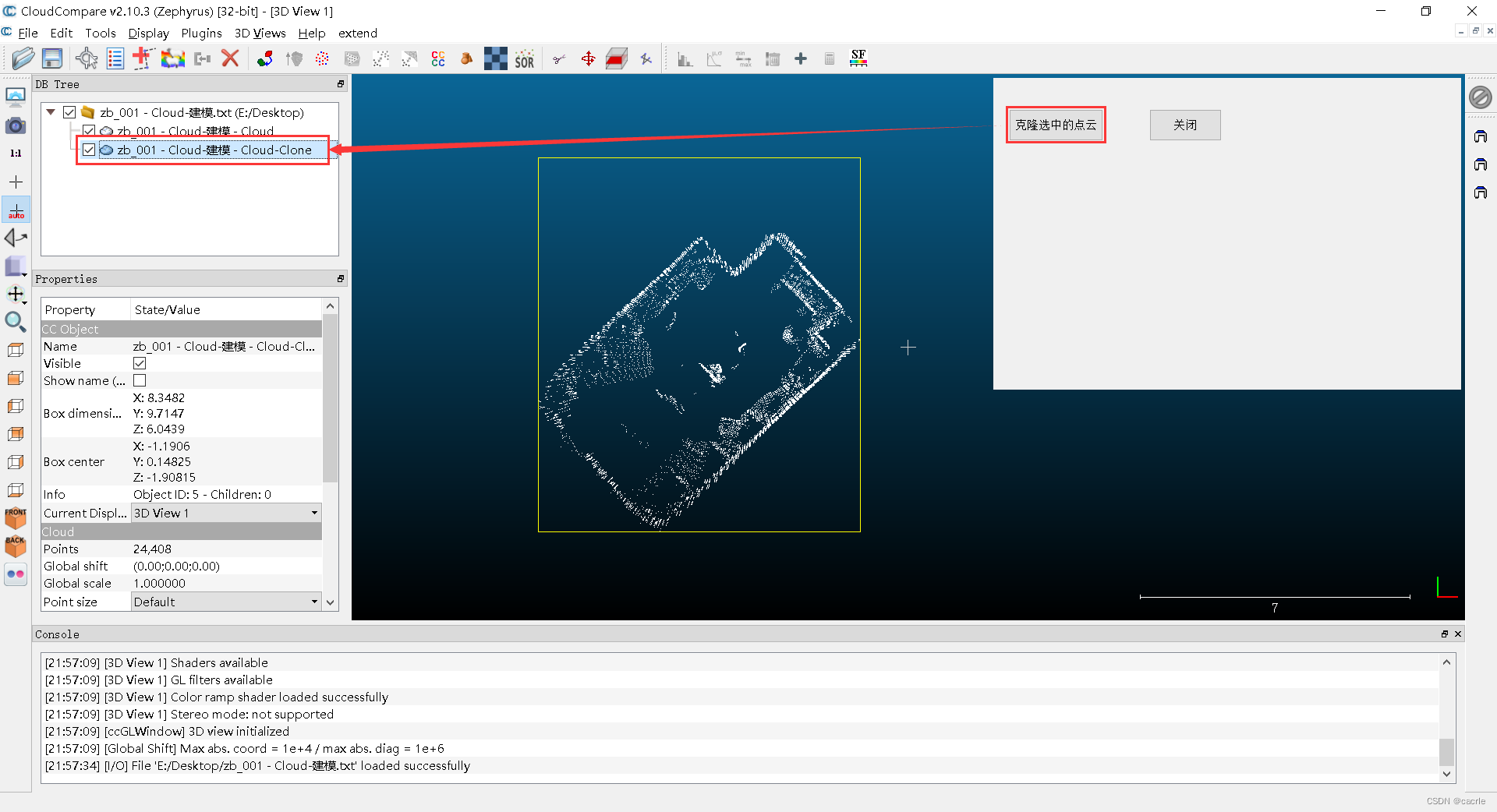
4.结果展示
参考资料:
[1] cacrle. Visual Studio如何使用Qt开发桌面软件?; 2023-04-18 [accessed 2023-04-19].
[2] cacrle. CloudCompare如何进行二次开发?; 2023-04-19 [accessed 2023-04-19].
[3] 问也去. CloudCompare实现点选点云功能; 2021-09-23 [accessed 2023-04-17].
[4] 进击の小黑. CloudCompare简单二次开发教程 上(界面设计与ui文件编译); 2020-12-17 [accessed 2023-04-17].
[5] 进击の小黑. CloudCompare简单二次开发 下(功能实现); 2020-12-18 [accessed 2023-04-17].
[6] shaomq2187. VS2019已有项目中添加Qt; 2021-11-08 [accessed 2023-04-19].
[7] wb175208. VS2013 在配置中手动添加宏定义; 2018-04-08 [accessed 2023-04-19].

![[入门必看]数据结构4.2:串的模式匹配](https://img-blog.csdnimg.cn/50b3c70d38fa44b7966ebf9ed7eefc10.png#pic_center)
![[LeetCode]路径总和](https://img-blog.csdnimg.cn/img_convert/2f6a8595f9e62ffaf3ea755b79e8e2ec.jpeg)


![C++ 高级数据结构————[ 单调栈 ]](https://img-blog.csdnimg.cn/bf408ca26f2546938f237f948fe2b61e.png)