P600旗舰视觉款无人机是一款准行业级无人机,搭载RTK定位系统,定位精度可达厘米级,飞行路径更精准、姿态更稳定;机身搭载Allspark机载计算机,算力可达21TOPS,可运行大部分主流算法;配置G1三轴吊舱作为视觉算法的核心硬件,通过其实现框选追踪及圆叉降落功能。
相较于P系列其他轴距无人机,该款无人机在飞行稳定性、续航时间及负载能力方面都有着卓越的优势。
01 硬件平台参数

P600旗舰视觉款采用工业级、模块化的无人机平台,平台自重(含6S10000mAh电池,RTK定位模块、Allspark机载计算机及G1三轴吊舱)3.3kg,最大起飞重量4kg,最大有效载荷0.7kg,最大满载飞行时间可达28min。
02 配套核心零部件
RTK
无人机配备RTK-GNSS定位模块,基于快速载波相位模糊度解算技术和多径抑制算法,为无人机提供厘米级定位信息;可同时接收多个地面基准站RTCM数据,支持短、中、长基线RTK解算。
Allspark机载计算机
Allspark搭载NVIDIA Jetson NX模块,提供21 TOPS 浮点运算能力,是高性能AI边缘计算系统的理想之选。开发者可在Allspark机载计算机上进行无人机、无人车、无人船等无人系统领域的二次开发。
Allspark搭载2.4G WiFi模组,并提供丰富的接口以满足各种外部设备接入,拥有更强的灵活性与扩展性。机身采用铝合金新材料外壳设计,内置静音散热风扇,尺寸94mm*59mm*37mm,重量213g,具有体积小,重量轻等优点。
G1吊舱
三轴防抖云台摄像模组采用的OV OS12D40彩色图像传感器,是一种高性能的 CMOS 1/2.49”图像传感器,最高能以60fps 速度提供1130万像素 (4512x2512)图像信号。像素点为1.404μm x 1.404μm 。支持拍摄11M像素高清图像,最高可支持 4K@60fps( 差值 ),4K@30fps 视频拍摄。
03 软件功能及地面站介绍
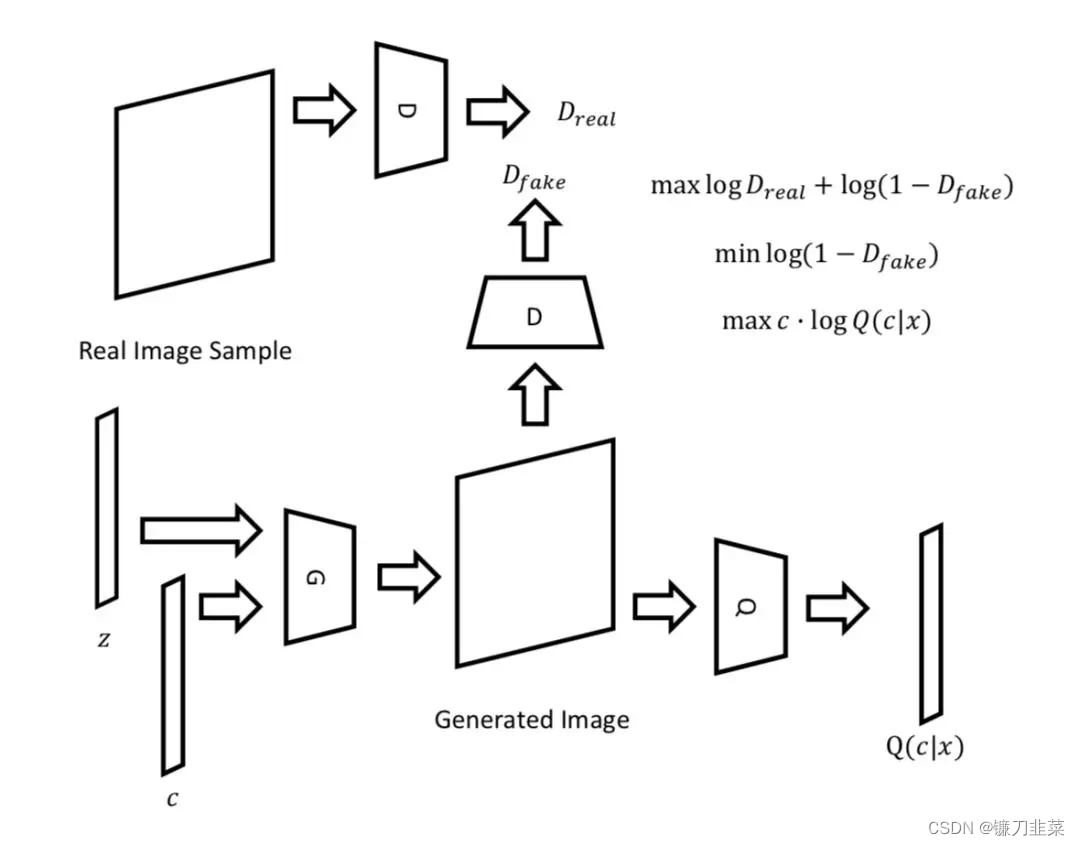
SiamRPN框选跟踪

Siamese-RPN框架由用于特征提取的孪生子网络(Siamese Net)和用于目标生成的区域建议子网络(Region Proposal Network,RPN)组成。其中,RPN子网中有两个分支,一个分支负责前景-背景分类,另一个分支用于建议区域微调。含有待跟踪目标的图像块被送入该框架中,整个系统能够以端到端的方式进行训练。
圆X降落


使用吊舱相比于固定相机可以实现更远、更精准的自主降落,吊舱可以根据视觉反馈自动调整航向角、俯仰角、横滚角,依靠这些数据加上无人机自身高度数据估算出目标的位置信息,并在无人机接近降落点的过程中不断地更新目标位置,实现高精度的自主降落。
Prometheus专业版地面站
下图为Prometheus轨迹控制模式下的绕8模式,在该地面站上进行实时 轨迹点打印输出显示。
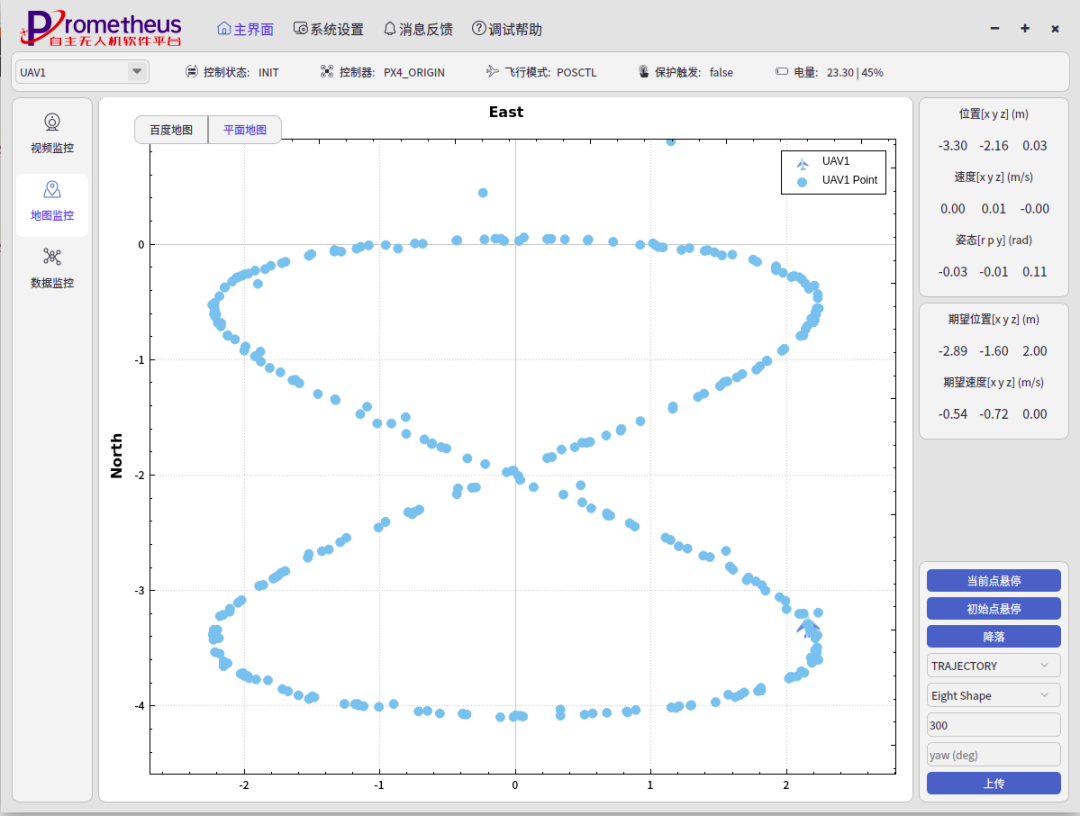
该地面站是使用Qt开发的基于Prometheus自主无人机开源项目的人机交互界面,简化了Prometheus的操作和使用流程,同时采用TCP/UDP通信机制,避免了ROS1多机通信繁琐的配置。
目前已适配了Prometheus项目中绝大数功能,包括但不限于单机、集群、吊舱、视觉控制操作、以及数据的实时反馈等,且同时适用于真机和仿真系统。显著降低上手难度并提升开发效率。
P600旗舰视觉款无人机在硬件、软件及配套地面站均进行了升级,适用于无人机视觉二次开发领域。该产品发货前我们将进行全面测试,确保无人机到手即用,为开发者省去复杂的配置调试工作,提升开发效率,助力无人机产业的发展。