Webots安装
文章目录
- Webots安装
- 1. Webots简介
- 2. Webots安装
- 2.1 系统要求
- 2.2 验证显卡驱动
- 2.3 安装
- 3. Webots仿真
- 3.1 world文件
- 3.2 Controller文件
- 3.3 Supervisor Controller
- 4. 启动方式
1. Webots简介
webots是一个开源3D移动机器人仿真框架。其为Cyberbotics公司旗下研发开源框架,为机器人的建模、编程和仿真提供了完整的开发环境。Webots内核基于开源动力学引擎ODE和OpenGL,可以在Windows、Linux和macOS上运行,并且支持多种编程语言(C/C++,Python,Java,MATLAB)。
Webots的主要功能是机器人的建模、控制与仿真,用于开发、测试和验证机器人算法。其内核基于ODE引擎,动力学仿真效果较为真实。
Webots支持多种不同类型的机器人仿真,如工业机械臂,轮式机器人,足式机器人,履带式机器人,汽车,无人机,水下机器人,航天器等。Webots支持多种虚拟传感器,如相机,雷达,力传感器,位置传感器,陀螺仪,惯性单元,GPS等。Webots还支持多种复杂环境的模拟,如室内,室外,崎岖路面,空中环境,水下环境等。
Webots场景采用OpenGL渲染,画面展示效果很棒。Webots可将仿真过程导出为动画或交互式HTML用于展示。
官方链接:Cyberbotics: Robotics simulation with Webots
Webots应用举例
- 移动机器人原型(学术研究、自动化工业、玩具工业等等)
- 机器人运动学研究(四足、腿式、人形等等)
- 多智能体研究(集群、协同等等)
- 适应性行为研究(遗传算法、神经网络等等)
- 教学机器人(机器人课程)
2. Webots安装
2.1 系统要求
| 需求项 | 最低要求 |
|---|---|
| 内存 | 2G |
| 主频 | 2GHz |
| NVIDIA or AMD OpenGL | V3.3 |
| 显存 | 512MB |
对于Linux系统只推荐NVIDIA系列。
典型适配系统:
- Linux系列
支持近期x86-64架构的Linux系统,例如Ubuntu20.04LTS,早于20.04之前的Ubuntu不支持。 - Windows系列
Windows10、Windows11 - Mac系列
macOS 11 “Big Sur” and 12 “Monterey”
在早期版本系列运行Webots可能会出现不兼容的问题。
2.2 验证显卡驱动
Ubuntu参考
Ubuntu20.04、22.04安装nvidia显卡驱动_ubuntu install xianka qudong_xianrenli38的博客-CSDN博客
Windows参考
windows10安装NVIDIA显卡驱动+cuda10.0教程
2.3 安装
注意:安装版安装之后,核心的模块功能均能使用,但是第三方工具(如Java、Python、MatLab)需要对指定项目进行运行和编译。
Deabin系列
wget -qO- https://cyberbotics.com/Cyberbotics.asc | sudo apt-key add -
sudo apt-add-repository 'deb https://cyberbotics.com/debian/ binary-amd64/'
sudo apt-get update
sudo apt-get install webots
Windows系列
官网下载安装

3. Webots仿真
一个Webots仿真由以下部分组成:
- 一个world文件(.wbt),world文件定义了一个或多个环境中的机器人,.wbt文件有时也取决于额外的原型文件(PROTO,文件后缀为.proto)和一些纹理配置组成。
- 机器人控制程序(C/C++/JAVA/PYTHON/MATLAB)
- 可选物理插件约束webots的物理行为
3.1 world文件
其包含每个对象位置、方向、几何、外观的描述,包含物理属性,world按照层次结构构建组织对象包含其他对象(VRML97),例如一个wbt文件包含一个机器人,机器人有两个轮子、一个距离传感器和一个包含摄像头的关节,这些都保存再.wbt文件中,其不包含控制代码,.wbt文件中仅指定每个机器人的控制器名,.wbt文件放置再worlds的子目录中。
3.2 Controller文件
一个controller控制器是指定机器人的电脑程序,支持C,C++,Java,Python或者MatLab编写,仿真开启,webots启动指定的控制器,每一个作为独立的进程,并且每个独立的进程都和仿真环境中的机器人联系起来,请注意,多个机器人可以使用相同的控制器代码,但是将为每个机器人启动不同的进程。
不同的语言会有不同的编译过程和过程文件,解释器语言没有执行文件,所有控制器的源文件和二进制文件都存放在controller文件夹中,每个机器人的控制器文件夹都作为controllers的子目录存放。
3.3 Supervisor Controller
监管控制器当supervisor域设定为TRUE的时候生效,它可以执行一些人为干预操作,其也可以被上述任何一种语言编写,不同于有规则的机器人控制器,监管控制器拥有权限操作,包括仿真控制等,例如,将机器人设定到随机点位,或者对仿真进行视频截取等。
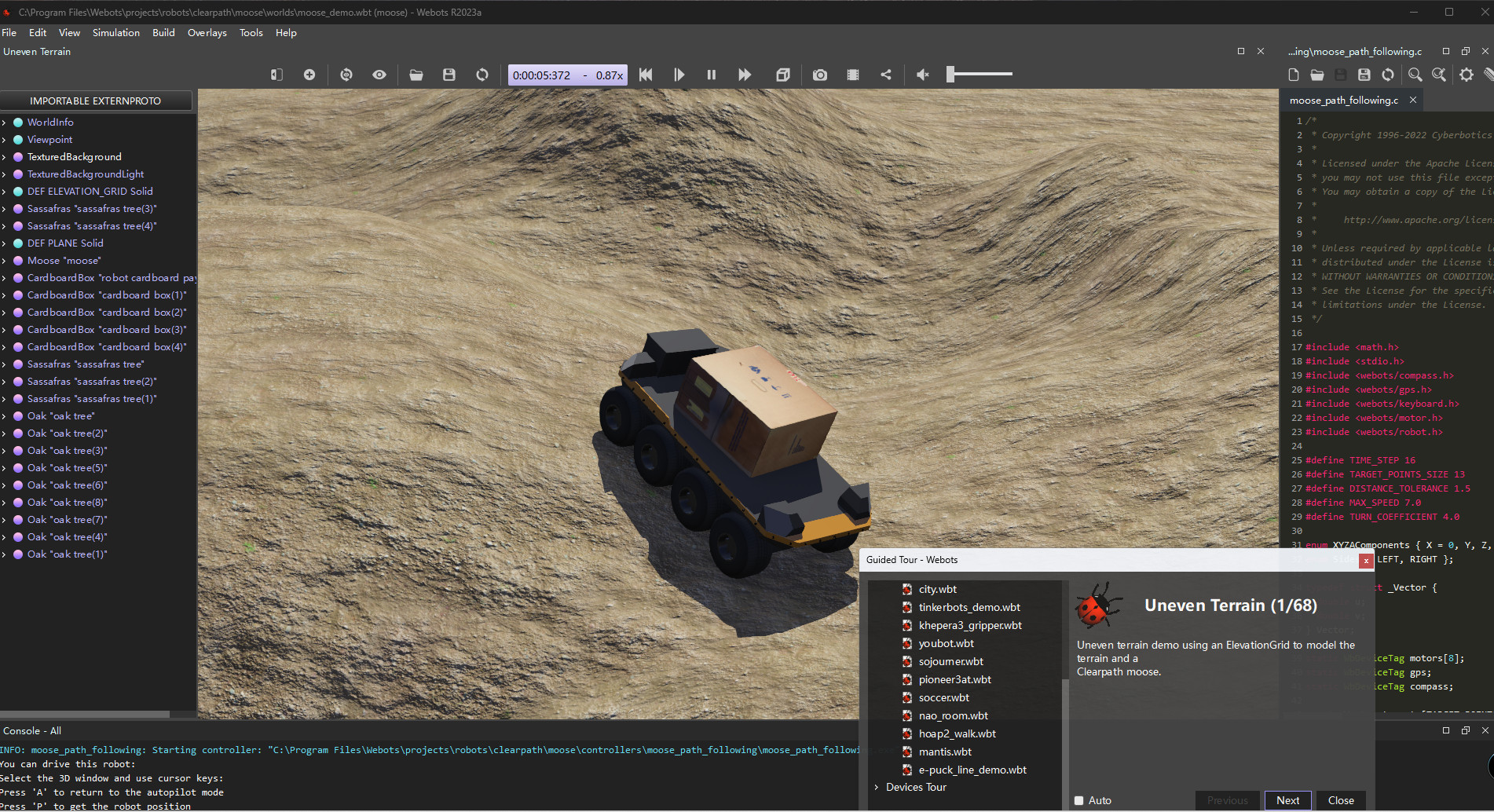
4. 启动方式
对于Linux系列,可以直接终端输入webots命令直接启动
对于Windows用户双击桌面图标即可

选择主题后进入仿真软件。
对于Windows如果有DOS命令的需求,可以将主程序所在路径添加到环境变量中。
webots命令的用法如下所示:
Usage: webots [options] [worldfile]
Options:
--help
Display this help message and exit.
--version
Display version information and exit.
--sysinfo
Display information about the system and exit.
--mode=<mode>
Choose the startup mode, overriding application preferences. The <mode>
argument must be either pause, realtime or fast.
--no-rendering
Disable rendering in the main 3D view.
--fullscreen
Start Webots in fullscreen.
--minimize
Minimize the Webots window on startup.
--batch
Prevent Webots from creating blocking pop-up windows.
--stdout
Redirect the stdout of the controllers to the terminal.
--stderr
Redirect the stderr of the controllers to the terminal.
--port
Change the TCP port used by Webots (default value is 1234).
--stream[=<mode>]
Start the Webots streaming server. The <mode> argument should be either
x3d (default) or mjpeg.
--extern-urls
Print on stdout the URL of extern controllers that should be started.
--heartbeat[=<time>]
Print a dot (.) on stdout every second or <time> milliseconds if specified.
--log-performance=<file>[,<steps>]
Measure the performance of Webots and log it in the file specified in the
<file> argument. The optional <steps> argument is an integer value that
specifies how many steps are logged. If the --sysinfo option is used, the
system information is prepended into the log file.
convert
Convert a PROTO file to a URDF, WBO, or WRL file.
Please report any bug to https://cyberbotics.com/bug