超越CIOU/SIOU | Wise-IoU助力YOLO强势涨点!!!
论文题目:Wise-IoU: Bounding Box Regression Loss with Dynamic Focusing Mechanism
论文链接:https://arxiv.org/abs/2301.10051
近年来的研究大多假设训练数据中的示例有较高的质量,致力于强化边界框损失的拟合能力。但注意到目标检测训练集中含有低质量示例,如果一味地强化边界框对低质量示例的回归,显然会危害模型检测性能的提升。
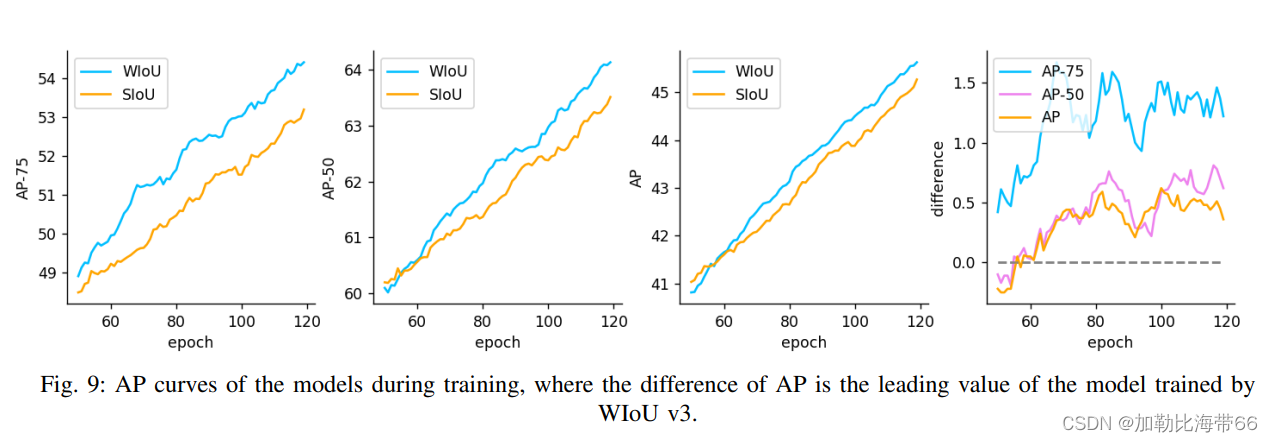
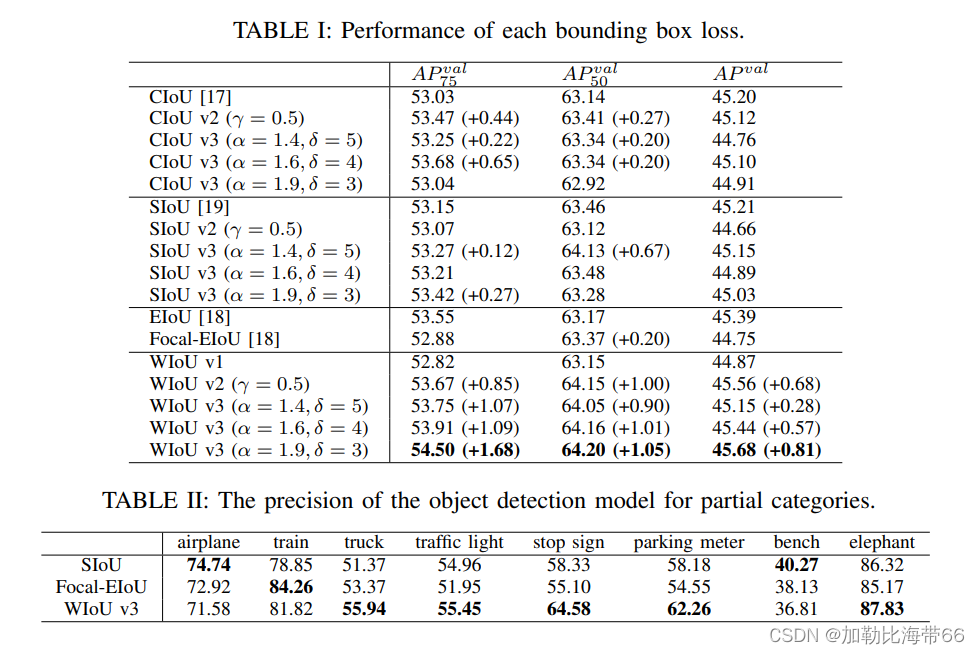
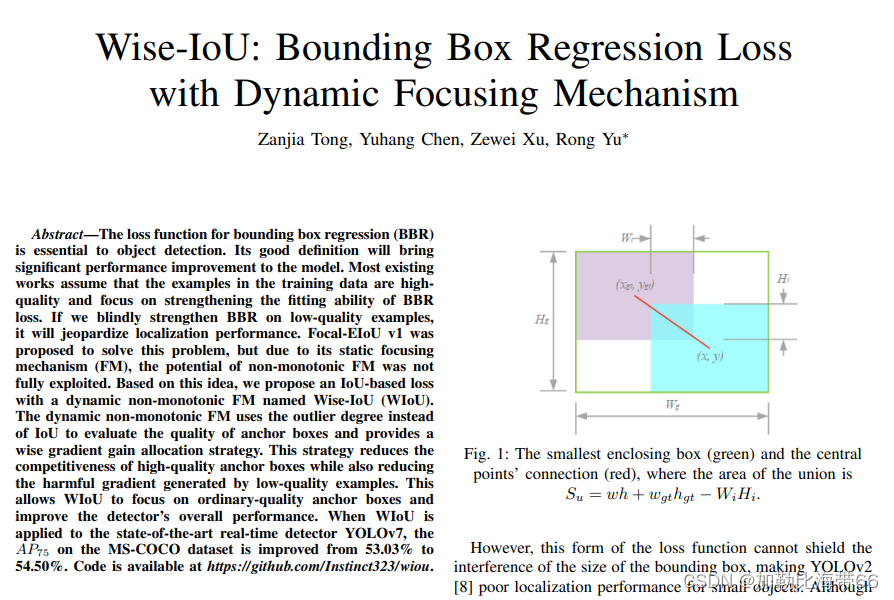
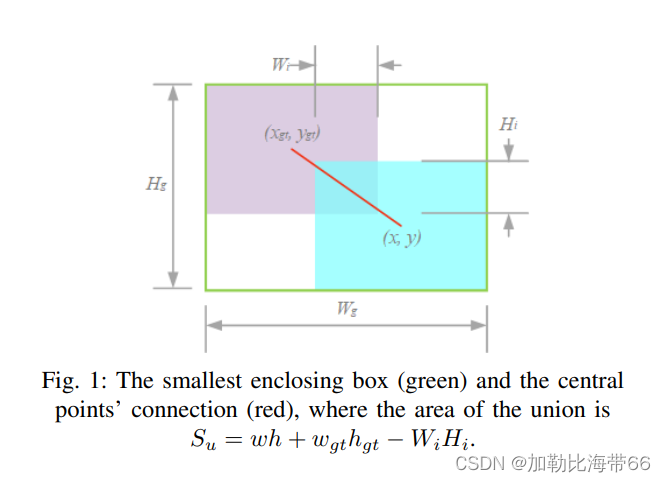
Focal-EIoU v1 被提出以解决这个问题,但由于其聚焦机制是静态的,并未充分挖掘非单调聚焦机制的潜能。基于这个观点,作者提出了动态非单调的聚焦机制,设计了 Wise-IoU (WIoU)。动态非单调聚焦机制使用“离群度”替代 IoU 对锚框进行质量评估,并提供了明智的梯度增益分配策略。该策略在降低高质量锚框的竞争力的同时,也减小了低质量示例产生的有害梯度。这使得 WIoU 可以聚焦于普通质量的锚框,并提高检测器的整体性能。将WIoU应用于最先进的单级检测器 YOLOv7 时,在 MS-COCO 数据集上的 AP-75 从 53.03% 提升到 54.50%。
一、 Wise-IoU相关代码
import math
import torch
class IoU_Cal:
''' pred, target: x0,y0,x1,y1
monotonous: {
None: origin
True: monotonic FM
False: non-monotonic FM
}
momentum: The momentum of running mean (This can be set by the function <momentum_estimation>)'''
iou_mean = 1.
monotonous = False
momentum = 1 - pow(0.05, 1 / (890 * 34))
_is_train = True
@classmethod
def momentum_estimation(cls, n, t):
''' n: Number of batches per training epoch
t: The epoch when mAP's ascension slowed significantly'''
time_to_real = n * t
cls.momentum = 1 - pow(0.05, 1 / time_to_real)
return cls.momentum
def __init__(self, pred, target):
self.pred, self.target = pred, target
self._fget = {
# x,y,w,h
'pred_xy': lambda: (self.pred[..., :2] + self.pred[..., 2: 4]) / 2,
'pred_wh': lambda: self.pred[..., 2: 4] - self.pred[..., :2],
'target_xy': lambda: (self.target[..., :2] + self.target[..., 2: 4]) / 2,
'target_wh': lambda: self.target[..., 2: 4] - self.target[..., :2],
# x0,y0,x1,y1
'min_coord': lambda: torch.minimum(self.pred[..., :4], self.target[..., :4]),
'max_coord': lambda: torch.maximum(self.pred[..., :4], self.target[..., :4]),
# The overlapping region
'wh_inter': lambda: torch.relu(self.min_coord[..., 2: 4] - self.max_coord[..., :2]),
's_inter': lambda: torch.prod(self.wh_inter, dim=-1),
# The area covered
's_union': lambda: torch.prod(self.pred_wh, dim=-1) +
torch.prod(self.target_wh, dim=-1) - self.s_inter,
# The smallest enclosing box
'wh_box': lambda: self.max_coord[..., 2: 4] - self.min_coord[..., :2],
's_box': lambda: torch.prod(self.wh_box, dim=-1),
'l2_box': lambda: torch.square(self.wh_box).sum(dim=-1),
# The central points' connection of the bounding boxes
'd_center': lambda: self.pred_xy - self.target_xy,
'l2_center': lambda: torch.square(self.d_center).sum(dim=-1),
# IoU
'iou': lambda: 1 - self.s_inter / self.s_union
}
self._update(self)
def __setitem__(self, key, value):
self._fget[key] = value
def __getattr__(self, item):
if callable(self._fget[item]):
self._fget[item] = self._fget[item]()
return self._fget[item]
@classmethod
def train(cls):
cls._is_train = True
@classmethod
def eval(cls):
cls._is_train = False
@classmethod
def _update(cls, self):
if cls._is_train: cls.iou_mean = (1 - cls.momentum) * cls.iou_mean + \
cls.momentum * self.iou.detach().mean().item()
def _scaled_loss(self, loss, alpha=1.9, delta=3):
if isinstance(self.monotonous, bool):
beta = self.iou.detach() / self.iou_mean
if self.monotonous:
loss *= beta.sqrt()
else:
divisor = delta * torch.pow(alpha, beta - delta)
loss *= beta / divisor
return loss
@classmethod
def IoU(cls, pred, target, self=None):
self = self if self else cls(pred, target)
return self.iou
@classmethod
def WIoU(cls, pred, target, self=None):
self = self if self else cls(pred, target)
dist = torch.exp(self.l2_center / self.l2_box.detach())
return self._scaled_loss(dist * self.iou)
@classmethod
def EIoU(cls, pred, target, self=None):
self = self if self else cls(pred, target)
penalty = self.l2_center / self.l2_box.detach() \
+ torch.square(self.d_center / self.wh_box).sum(dim=-1)
return self._scaled_loss(self.iou + penalty)
@classmethod
def GIoU(cls, pred, target, self=None):
self = self if self else cls(pred, target)
return self._scaled_loss(self.iou + (self.s_box - self.s_union) / self.s_box)
@classmethod
def DIoU(cls, pred, target, self=None):
self = self if self else cls(pred, target)
return self._scaled_loss(self.iou + self.l2_center / self.l2_box)
@classmethod
def CIoU(cls, pred, target, eps=1e-4, self=None):
self = self if self else cls(pred, target)
v = 4 / math.pi ** 2 * \
(torch.atan(self.pred_wh[..., 0] / (self.pred_wh[..., 1] + eps)) -
torch.atan(self.target_wh[..., 0] / (self.target_wh[..., 1] + eps))) ** 2
alpha = v / (self.iou + v)
return self._scaled_loss(self.iou + self.l2_center / self.l2_box + alpha.detach() * v)
@classmethod
def SIoU(cls, pred, target, theta=4, self=None):
self = self if self else cls(pred, target)
# Angle Cost
angle = torch.arcsin(torch.abs(self.d_center).min(dim=-1)[0] / (self.l2_center.sqrt() + 1e-4))
angle = torch.sin(2 * angle) - 2
# Dist Cost
dist = angle[..., None] * torch.square(self.d_center / self.wh_box)
dist = 2 - torch.exp(dist[..., 0]) - torch.exp(dist[..., 1])
# Shape Cost
d_shape = torch.abs(self.pred_wh - self.target_wh)
big_shape = torch.maximum(self.pred_wh, self.target_wh)
w_shape = 1 - torch.exp(- d_shape[..., 0] / big_shape[..., 0])
h_shape = 1 - torch.exp(- d_shape[..., 1] / big_shape[..., 1])
shape = w_shape ** theta + h_shape ** theta
return self._scaled_loss(self.iou + (dist + shape) / 2)二、实验对比结果