资料编号:145 下面是相关功能视频演示:
145-基于stm32单片机的超声波测距显示倒车雷达提醒报警系统Proteus仿真(源码+原理图+仿真+论文)
设计内容
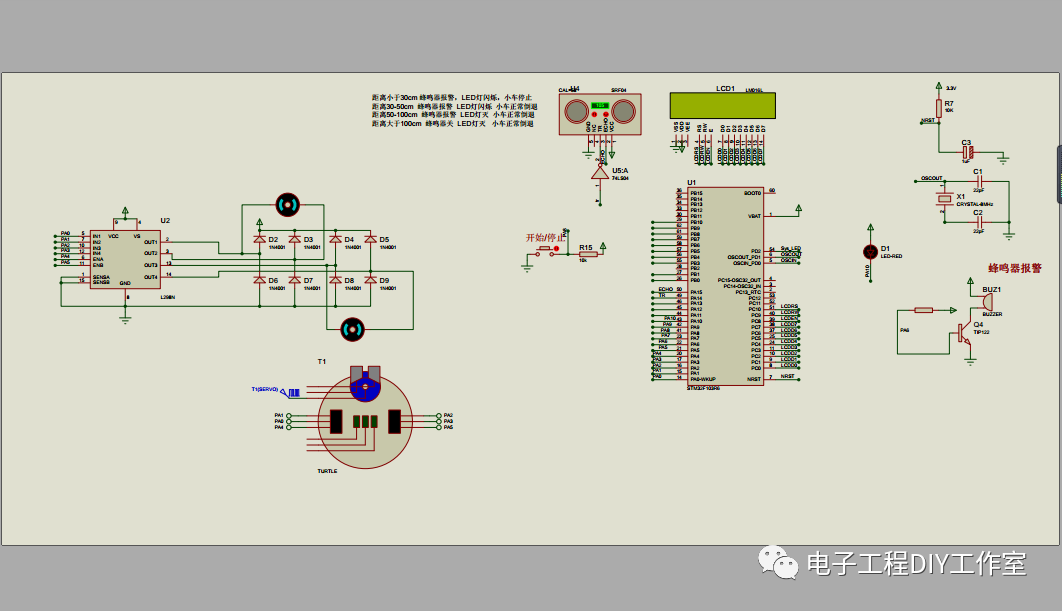
本次嵌入式课程设计综合实验的内容为倒车测距系统。以proteus+ keilU5为模拟硬件基础,完成定时器timer2、LED显示、蜂鸣器报警、超声波SRF04测距等多项任务。
设计方案
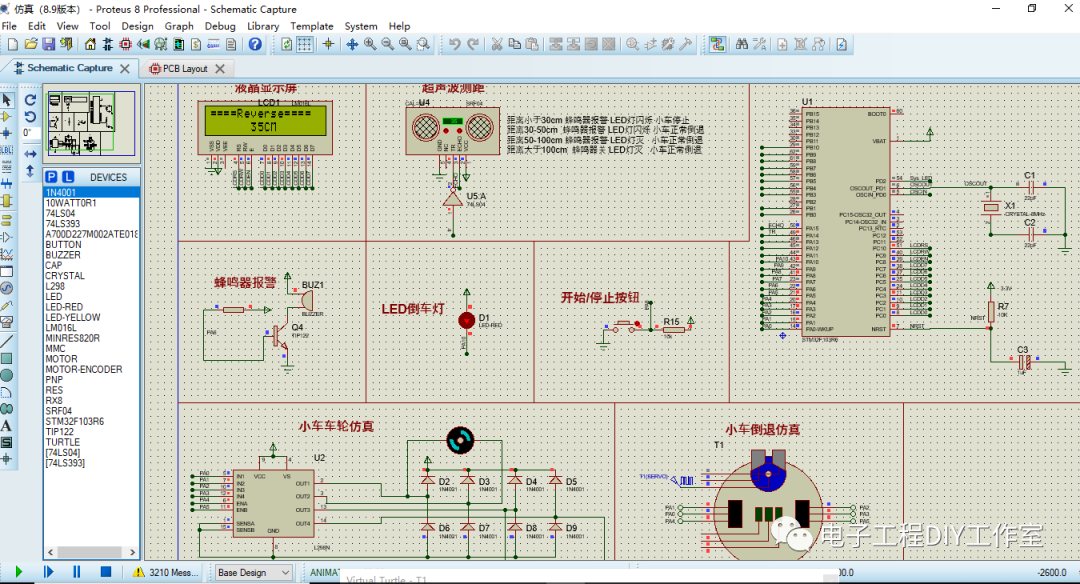
以stm32为最小系统电路进行连接,按钮控制系统开关,使用SRF04采集倒车,LCD1602液晶显示屏显示汽车距离障碍物的实时距离。当距离障碍物大于100cm时,小车自由倒退,蜂鸣器、LED提示灯关闭,车辆正常倒退;当距离障碍物大于50cm小于100cm时,蜂鸣器报警,LED灯关闭,车辆正常倒退;当距离障碍物大于30cm小于50cm时,蜂鸣器报警,LED灯闪烁提示,车辆正常倒退;当距离障碍物小于30cm时,蜂鸣器报警,LED灯闪烁提示,小车停止。
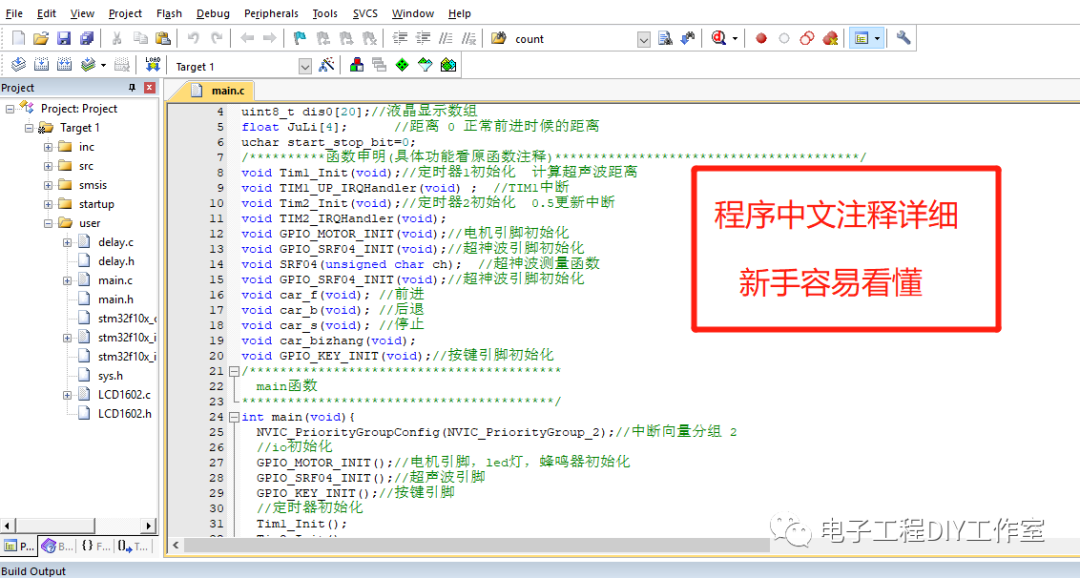
下面是该资料的程序部分展示:
int main(void){
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//中断向量分组 2
//io初始化
GPIO_MOTOR_INIT();//电机引脚,led灯,蜂鸣器初始化
GPIO_SRF04_INIT();//超声波引脚
GPIO_KEY_INIT();//按键引脚
//定时器初始化
Tim1_Init();
Tim2_Init();
//1602液晶
LCD_init(); //LCD1602初始化
LCD_clr();//LCD清屏幕
//主循环
while (1)
{
if(!k1)//开始停止按键
{
while(!k1);
LCD_clr();//清屏幕
start_stop_bit=!start_stop_bit;//切换模式
if(start_stop_bit)///运行状态下显示下面字符
{
sprintf(dis0,"====Reverse====\n");//更新显示
LCD_Write_String(0,0,dis0);//
}
else
{
beep =0;//关蜂鸣器
TIM_Cmd(TIM2,DISABLE);//关闭定时器2
LED = 1;//关灯
}
}
if(start_stop_bit) //运行状态
{
//超声波测距
SRF04(0);
car_bizhang(); //小车状态函数
sprintf(dis0,"%3.0fCM\n",JuLi[0]);//更新显示
LCD_Write_String(5,1,dis0);
//delay_ms(50);
}
}
}
下面是整体仿真图展示:
下面是该设计的设计报告展示:
下面是该设计的PPT展示:
下面是该资料的分享下载链接:
https://pan.baidu.com/s/11uWhKkFOPgg0DLkov6PoZg?pwd=g8y4


![[Python]字符串常用操作与方法](https://img-blog.csdnimg.cn/b866807aef9941c9a2255576c7151368.png)