目录
一、PID算法
二、模拟PID
模拟PID调节器的控制规律为
模拟PID调节器的传递函数为
三、数字PID
P控制
PI控制
PD控制
PID控制
数字PID增量型控制算式
PID位置型控制算式
一、PID算法
PID控制是最早发展的自动控制策略之一,是微机化控制系统的一个重要组成部分,整个系统的控制功能主要由PID控制算法来实现。
PID控制系统由比例单元、积分单元、微分单元组成,根据偏差的比例(P)、积分(I)、微分(D)计算出系统所需控制量并进行控制,称为PID控制。实际经验和理论分析都表明,PID控制能够满足相当多工业对象的控制要求,至今仍是一种应用最为广泛的控制算法之一,实际中也有PI和PD控制。
二、模拟PID
在模拟控制系统中,调节器最常用的控制规律是PID控制,常规PID控制系统原理框图如图所示,系统由模拟PID调节器、执行机构及控制对象组成。
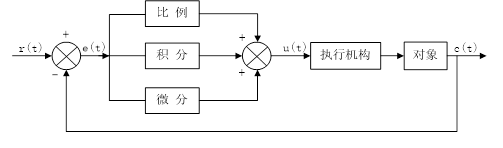 (图1)
(图1)
PID调节器是一种线性调节器,它根据给定值![]() 与实际输出值
与实际输出值![]() 构成的控制偏差:
构成的控制偏差:
![]()
将偏差的比例、积分、微分通过线性组合构成控制量,对控制对象进行控制,故称为PID调节器。在实际应用中,常根据对象的特征和控制要求,将P、I、D基本控制规律进行适当组合,以达到对被控对象进行有效控制的目的。例如,P调节器,PI调节器,PID调节器等。
模拟PID调节器的控制规律为
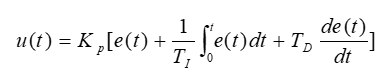 (式2)
(式2)
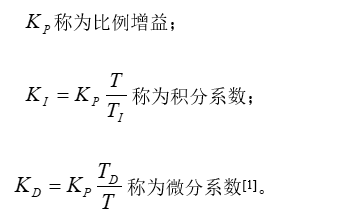
![]() 为比例系数,
为比例系数,![]() 为积分时间常数,
为积分时间常数,![]() 为微分时间常数。
为微分时间常数。
简单的说,PID调节器各校正环节的作用是:
(1)比例环节:即时成比例地反应控制系统的偏差信号![]() ,偏差一旦产生,调节器立即产生控制作用以减少偏差。
,偏差一旦产生,调节器立即产生控制作用以减少偏差。
(2)积分环节:主要用于消除静差,提高系统的无差度。积分作用的强弱取决于积分时间常数![]() ,
,![]() 越大,积分作用越弱,反之则越强。
越大,积分作用越弱,反之则越强。
(3)微分环节:能反映偏差信号的变化趋势(变化速率),并能在偏差信号的值变得太大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减少调节时间。
模拟PID调节器的传递函数为
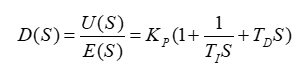 (式3)
(式3)
三、数字PID
在数字控制系统中,用计算机取代了模拟器件,控制规律的实现是由计算机软件来完成的。因此,系统中数字控制的设计,实际上是计算机算法的设计。
由于计算机只能识别数字量,不能对连续的控制算式直接进行运算,故在计算机控制系统中,首先必须对控制规律进行离散化的算法设计。
为将模拟PID控制规律按式(式2)离散化,我们把(图1)中![]() 、
、![]() 、
、![]() 、
、![]() 在第n次采样的数据分别用
在第n次采样的数据分别用![]() 、
、![]() 、
、![]() 、
、![]() 表示,于是式(1)变为 :
表示,于是式(1)变为 :
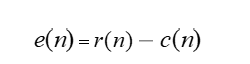 (式4)(看图1即可看懂,c(n)为负反馈调节)
(式4)(看图1即可看懂,c(n)为负反馈调节)
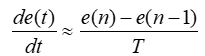
当采样周期T很小时,dt 可以用 T 近似代替,de(t) 可用 e(n)-e(n-1) 近似代替,“积分”用“求和”近似代替,即可作如下近似:
 (式5)
(式5) 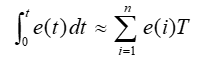 (式6)
(式6)
这样,式(2)便可离散化以下差分方程:
 (式7)
(式7)
上式中u0是偏差为零时的初值,上式中的第一项起比例控制作用,称为比例(P)项up(n),即
![]() (式8)
(式8)
第二项起积分控制作用,称为积分(I)项ui(n)即:
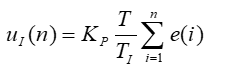 (式9)
(式9)
第三项起微分控制作用,称为微分(D)项uD(n)即
 (式10)
(式10)
这三种作用可单独使用(微分作用一般不单独使用)或合并使用,常用的组合有:
P控制
![]() (式11)
(式11)
PI控制
![]() (式12)
(式12)
PD控制
![]() (式13)
(式13)
PID控制
![]() (式14)
(式14)
式(7)的输出量![]() 为全量输出,它对于被控对象的执行机构每次采样时刻应达到的位置。
为全量输出,它对于被控对象的执行机构每次采样时刻应达到的位置。

因此,式(7)又称为位置型PID算式。由式(7)可看出,位置型控制算式不够方便,这是因为要累加偏差![]() ,不仅要占用较多的存储单元,而且不便于编写程序,为此对式(7)进行改进。
,不仅要占用较多的存储单元,而且不便于编写程序,为此对式(7)进行改进。
根据式(7)不难看出u(n-1)的表达式,即:
 (式15)
(式15)
将式(7)和式(15)相减,即得数字PID增量型控制算式
数字PID增量型控制算式
 (式16)
(式16)
从上式可得数字PID位置型控制算式
PID位置型控制算式
 (式17)
(式17)
式中:
数字PID位置型示意图和数字PID增量型示意图分别如(图2)和(图3)所示:
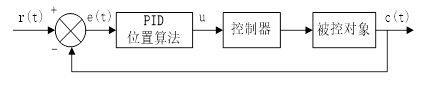 (图2)
(图2)
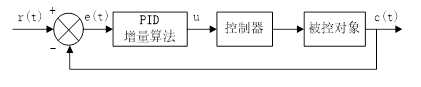 (图3)
(图3)





![[Linux打怪升级之路]-yun安装和gcc的使用](https://img-blog.csdnimg.cn/fd5b4868e8174ab3967724da7eaa62db.png)



